第七章 采样控制系统
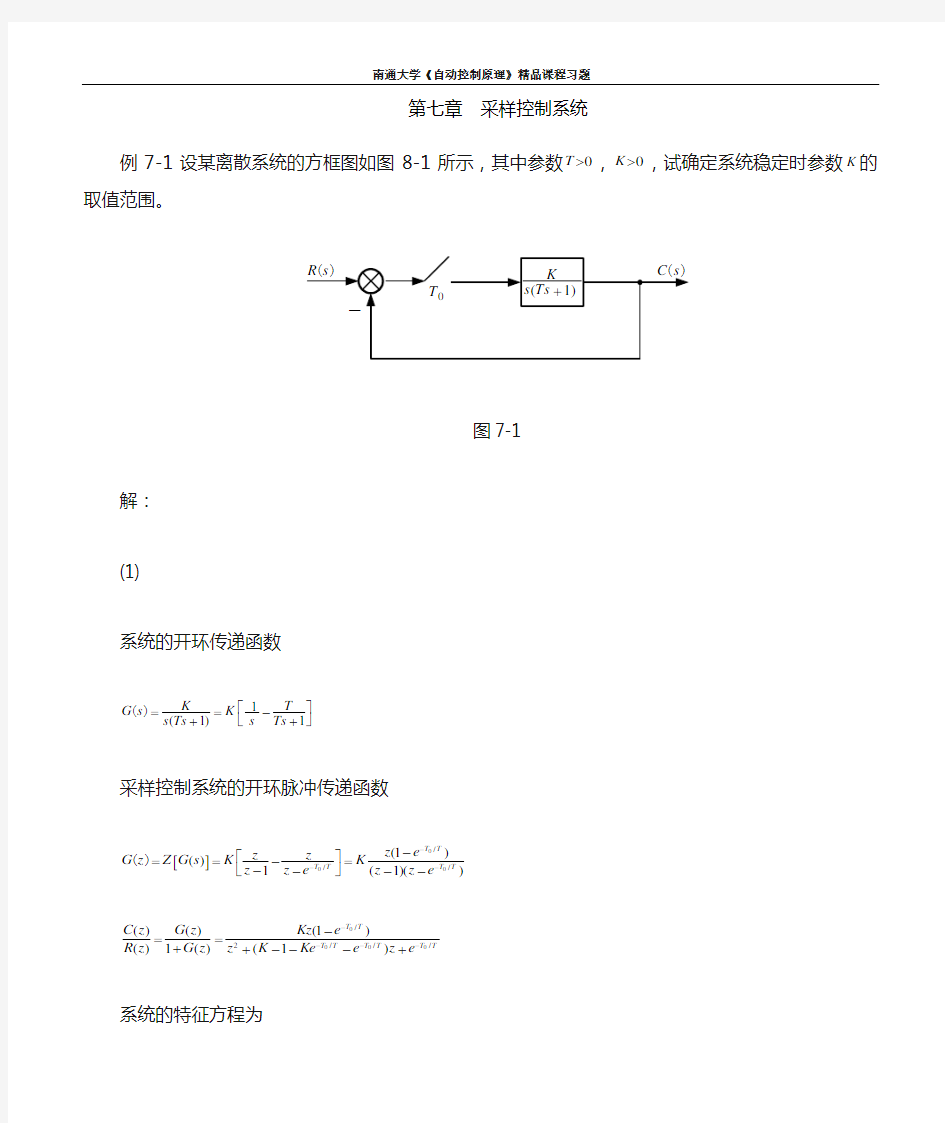
例7-1设某离散系统的方框图如图8-1所示,其中参数0T >,0K >,试确定系统稳定时参数K 的取值范围。
图7-1
解: (1)
系统的开环传递函数
1 (1)
1K T G s K s Ts s Ts ??=
=-??++()
采样控制系统的开环脉冲传递函数
[]000///(1) ()1(1)()T T T T T T z e z z G z Z G s K K z z e z z e ----??==-=??----() 0000/2
///()()(1)
()1()(1)T T T T T T T T
C z G z Kz e R z G z z K Ke e z e -----==++---+ 系统的特征方程为
0002///(1)0T T T T T T z K Ke e z e ---+---+=……………………………………………① 作双线性变换11
w z w +=-代入式①得
(
)
()
0002
///11(1)011
T T T T T T w w K Ke e e w w ---+++---+=-- ()()()0
22//2/1(1)110T T T T T T w K Ke e w e w ---++----+-= ()0
/2///2(1)2(1)0T T T T T T T T K Ke w e w e K Ke -----+-++-+=
应用劳斯判据可知只需各项系数为正即可。 000000//////02(1)2(1)0012(1)0T T T T T T T T
T T T T K Ke e e K e
e K Ke ------->?+?->?<?
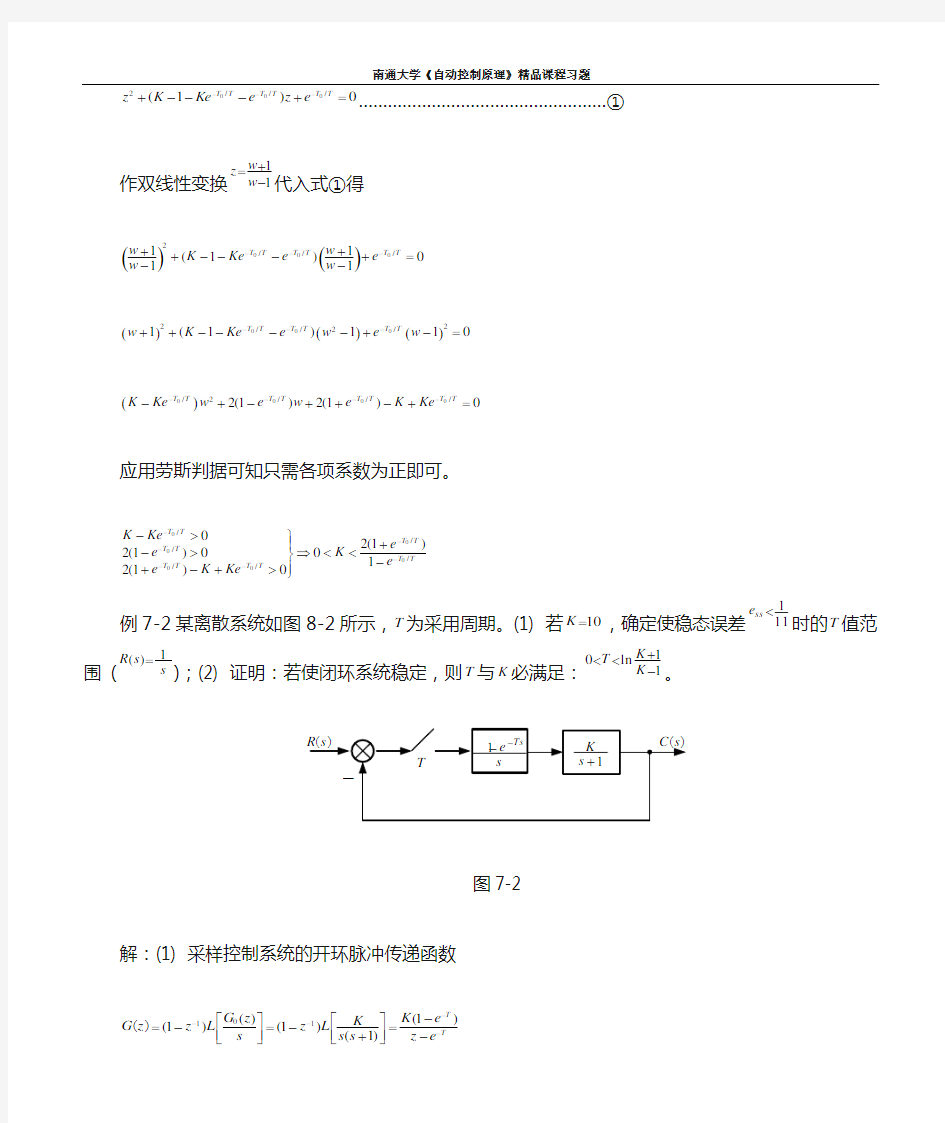
例7-2某离散系统如图8-2所示,T 为采用周期。(1) 若10=K ,确定使稳态误差111 范围 (1() =R s s );(2) 证明:若使闭环系统稳定,则T 与K 必满足:10ln 1 +<<-K T K 。 图7-2 解:(1) 采样控制系统的开环脉冲传递函数 011 ()(1)(1)(1)(1)-----????=-=-=????+-????T T G z K e K G z z L z L s s s z e () 系统误差脉冲传递函数为 ()()1(1) ----= =+-+-T T T z e E z R z R z G z z e K e 1()() 1()=R s ,()=z R z 将()R z 代入上式,得 1111lim 1()111 →===++sr z e G z K 所以使稳态误差111 (2) 证明: ()()(1) ()1()(1) ----== +-+-T T T C z G z K e R z G z z e K e 系统的特征方程为 (1)0 (1)-----+-=?=+-T T T T z e K e z e K e 要闭环采样系统稳定只需1 即1(1)1---<+- 1(1) (1)1 ----?-<+-???+- T T e K e e K e 10ln 1+<<-K T K 证毕。 例7-3求图7-3所示系统的闭环脉冲传递函数。 图7-3 2)将系统的结构框图变化,如下图所示: 2E s R s C s H s * =-()()()() ……………………………………………① 11E s E s H s C s =()()-()() ……………………………………………② 1C s E s G s *=()()() ……………………………………………③ 将②式代入③式 111E s E s H s E s G s *=()()-()()() 两边采样111111E s E s E s E s GH s E s GH s *******=?= +()()()-()()()() 对③式两边采样1C s E s G s ***=()()() ……………………………④ 将④式代入①式 12E s R s E s G s H s **=-()()()()()两边采样12E s R s E s G s H s ***** =-()()()()(),则 11211GH s E s R s GH s G s H s ** **** +=++()()()()()() 对①式两边采样2 E s R s C s H s **** =-()()()()2R s E s C s H s * ***-?=()()()() 112212111GH s R s R s GH s G s H s G s R s C s H s GH s G s H s ****** *** **** +-++==++() ()()()()()()()()()()()() 两边进行Z 变换 121211G z R z G z C z z GH z G z H z GH z G z H z Φ==?==++++()()()()()()()()()()() 例7-4系统结构如图7-4所示,采样周期0.2 s T =, 输入信号21()12 r t t t =++。试 求该系统在t →∞时的稳态误差。 图7-4 解:() 23 2 10(0.51) 1105(1)Ts Ts s e G s e s s s s --+-==-+() 2 132325(1)10551(1)(1)(1)T z z Tz z G z z Z z s s z z -+??-??=-+=+????--?? () 将0.2 s T =代入上式,并化简2 1.20.8(1)z G z z -=-(),根据离散系统稳态误差系数可求得 22 0.2110.1110.4ss p a T T T e K K K υ*=++=++=++∞∞ 5-25 对于典型二阶系统,已知参数3=n ω,7.0=ξ,试确定截止频率c ω和相角裕度γ。 解 依题意,可设系统的开环传递函数为 ) 12 .4(143 .2) 37.02(3)2()(22+=??+=+=s s s s s s s G n n ξωω 绘制开环对数幅频特性曲线) (ωL 如图解5-25所示,得 143.2=c ω ?=+?=63)(180c ω?γ 5-26 对于典型二阶系统,已知σ%=15%,s 3=s t ,试计算相角裕度γ。 解 依题意,可设系统的开环传递函数为 ) 2()(2n n s s s G ξωω+= 依题 ???? ?====--n s o o o o t e σξξπ 5.33152 1 联立求解 ???==257.2517 .0n ωξ 有 )1333 .2(1824 .2) 257.2517.02(257.2)(2 +=??+= s s s s s G 绘制开环对数幅频特性曲线)(ωL 如图解5-26所示,得 1824.2=c ω ?=+?=9.46)(180c ω?γ 5-27 某单位反馈系统,其开环传递函数 G s s s s s ().(.)(.)(.) = +++1670810251006251 试应用尼柯尔斯图线,绘制闭环系统对数幅频特性和相频特性曲线。 解 由G(s)知:20lg16.7=24.5db 交接频率:ω11 08 125= =.. , ω210254==. , ω310062516==. 图解5-27 Bode 图 Nyquist 图 5-28 某控制系统,其结构图如图5-83所示,图中 ) 20 1(8.4)(,81) 1(10)(21s s s G s s s G += ++= 试按以下数据估算系统时域指标σ%和t s 。 (1)γ和ωc (2)M r 和ωc (3)闭环幅频特性曲线形状 解 (1) ) 20 1)(81()1(48)()()(21s s s s s G s G s G +++= = db 6.3348lg 20= 20, 1,125.081321====ωωω 065,6≈=∴ γωc 查图5-56 得 13.16 .6, %21%== =C S t ωσ秒 (2) 根据M r ,ωC 估算性能指标 当 ω=5 时: L(ω)=0, ?(ω)=-111° 一。SCADA系统概述 SCADA(Supervisory Control And Data Acquisition)系统,即数据采集与监视控制系统。SCADA系统的应用领域很广,它可以应用于电力系统、给水系统、石油、化工等领域的数据采集与监视控制以及过程控制等诸多领域。在电力系统以及电气化铁道上又称远动系统。 SCADA系统是以计算机为基础的生产过程控制与调度自动化系统。它可以对现场的运行设备进行监视和控制,以实现数据采集、设备控制、测量、参数调节以及各类信号报警等各项功能。 由于各个应用领域对SCADA的要求不同,所以不同应用领域的SCADA系统发展也不完全相同。 在电力系统中,SCADA系统应用最为广泛,技术发展也最为成熟。它作为能量管理系统(EMS系统)的一个最主要的子系统,有着信息完整、提高效率、正确掌握系统运行状态、加快决策、能帮助快速诊断出系统故障状态等优势,现已经成为电力调度不可缺少的工具。它对提高电网运行的可靠性、安全性与经济效益,减轻调度员的负担,实现电力调度自动化与现代化,提高调度的效率和水平中方面有着不可替代的作用。 SCADA在铁道电气化远动系统上的应用较早,在保证电气化铁路的安全可靠供电,提高铁路运输的调度管理水平起到了很大的作用。在铁道电气化SCADA系统的发展过程中,随着计算机的发展,不同时期有不同的产品,同时我国也从国外引进了大量的SCADA产品与设备,这些都带动了铁道电气化远动系统向更高的目标发展。 二.SCADA系统发展历程 SCADA(Supervisory Control and Data Acquisition)系统,全名为数据采集与监视控制系统。SCADA系统自诞生之日起就与计算机技术的发展紧密相关。SCADA系统发展到今天已经经历了三代。 第一代是基于专用计算机和专用*作系统的SCADA系统,如电力自动化研究院为华北电网开发的SD176系统以及在日本日立公司为我国铁道电气化远动系统所设计的H-80M系统。这一阶段是从计算机运用到SCADA系统时开始到70年代。 第二代是80年代基于通用计算机的SCADA系统,在第二代中,广泛采用VAX等其它计算机以及其它通用工作站,*作系统一般是通用的UNIX*作系统。在这一阶段,SCADA系统在电网调度自动化中与经济运行分析,自动发电控制(AGC)以及网络分析结合到一起构成了EMS系统(能量管理系统)。第一代与第二代SCADA系统的共同特点是基于集中式计算机系统,并且系统不具有开放性,因而系统维护,升级以及与其它联网构成很大困难。 90年代按照开放的原则,基于分布式计算机网络以及关系数据库技术的能够实现大范围联网的EMS/SCADA系统称为第三代。这一阶段是我国SCADA/EMS系统发展最快的阶段,各种最新的计算机技术都汇集进SCADA/EMS系统中。这一阶段也是我国对电力系统自动化以及电网建设投资最大的时期,国家计划未来三年内投资2700亿元改造城乡电网可见国家对电力系统自动化以及电网建设的重视程度。 第四代SCADA/EMS系统的基础条件已经或即将具备,预计将与21世纪初诞生。该系统的主要特征是采用Internet技术、面向对象技术、神经网络技术以及JAVA技术等技术,继续扩大SCADA/EMS系统与其 第六章: 例1 图6-1是一采用PD 串联校正的控制系统。 图6-1 PD 串联校正的控制系统 (1)当10,1p d K K ==时,求相位裕量γ。 解:系统的开环传递函数为 ()(1) p d K K K s W s s s += + 当10,1p d K K ==时,有10(10.1) ()(1) K s W s s s +=+。 开环对数幅频特性为 ()20lg1020lg L ωω=+- 0.1ω=时,()20lg1020lg 40L dB ωω=-= 1ω=时,()20lg1020lg 20L dB ωω=-= 剪切频率c ω为 ()20lg1020lg 20lg 0L dB ωωω=--= ,c ω相位裕量γ为 1 18090arctan arctan 35.10.1 c c γωω=?-?+-=? (2)若要求该系统剪切频率5c ω=,相位裕量50γ=?,求,p d K K 的值。 解: 系统的开环传递函数为 (1) ()(1) (1) p d p d p K K K s K K K s W s s s s s ++= = ++ 相位裕量为 18090arctan arctan 50d c c p K K γωω=?-?+-=? 得,/0.16d p K K = 当5c ω=,可以得到(5)20lg 20lg 520lg 50p L K =--=,最后解得 25,4p d K K == 例2 已知单位负反馈系统开环传递函数为 ()(0.051)(0.21) K K W s s s s = ++ 试设计串联校正装置,使系统1 5s v K -≥,超调量不大于25%,调节时间不大于1s 。 解 (1) 由性能指标可知,系统提出的是时域指标,可利用它和频域指标的近似关系,先用频域法校正,然后再进行验算。由 2 %0.160.4(1)0.25%12 1.5(1) 2.5(1)1sin ()p s c p p p c M k t k M M M δπωγω=+-≤?? ?=≤?? ?=+-+-???= ?? 得系统要求的各项指标为 ?? ? ??=== 7.54)(74.7225.1c c p M ωγω (2)由5v K ≥,可以计算出放大系数5K =。其传递函数为 55 ()(0.051)(0.21)(1)(1) 205 W s s s s s s s = = ++++ 其对数幅频特性如图6-14所示。 系统未校正时,按下式可计算出其穿越频率,c ω如认为 1,20c ω>>得 5 ()15 c c c A ωωω≈ =? 故得5c ω≈ 其相位裕度为 数据采集及管理控制系统设计规范 服装企业实时数据采集及管理控制系统的设计 Design Of Real-time Data Collection And Administration Control System In Clothes Enterprise 摘要:随着计算机和通讯技术的飞速发展,国内服装业信息化的高要求也迫在眉睫。本文主要针对服装业讨论设计了一 套实时数据采集及管理控制系统,它避免了当前服装业常 见管理软件的信息延迟与滞后的问题,能够做到生产过程 的实时控制,把国内服装业的管理水平推向一个更高的层 次。 关键词:实时控制;工况信息;批处理;成绩表现;生产平衡 Abstract:With the development of the computer and communication technology , it is very necessary for clothes enterprises in china to accelerate innovations . In this paper , it is principal to design a system in clothes enterprise for real- time data collection and administration control , which can escape the important problem occurred by nowadays administrative software —— information delay and can improve the administration level . 安徽建筑工业大学 计算机控制技术 课程设计 课题名称8路数据采集及报警控制系统 系别电子与信息工程学院 专业电子信息工程 班级10城建电子(2)班 姓名邵磊 学号10205900235 指导老师严辉夏巍丁刚 时间2013年6月17日至 2013年6月30日 目录 一、总体设计: 1.1 设计思路 1.2 课题目的 二、方案论证: 2.1 A/D模数转换的选择 2.2 单片机的选择 2.3 按键选择 2.4 系统框图 三、硬件电路设计: 3.1 单片机介绍 3.2 ADC0809结构功能 3.3 ADC0809的工作时序 3.4 ADC0809工作过程 四、系统程序设计: 4.1 程序流程框图 4.2 主程序 五、结束语 六、附录 一、总体设计 1.1 设计思路 我们选择单片机与A/D转换芯片结合的方法实现本设计。使用的基本元器件是:AT89C52单片机,ADC0809模数转换芯片,LCD显示器,按键,电容,电阻,晶振等。 数字电压测量电路由A/D转换、数据处理及显示控制等组成。A/D 转换由集成电路ADC0809完成。ADC0809具有8路拟输入端口,地址线(23~- 25脚)可决定对哪一路模拟输入作A/D换。22脚为地址锁存控制,当输入为高电平时,对地址信号进行锁存。6脚为测试控制,当输入一个2uS宽高电平脉冲时,就开始A/D转换。7脚为A/D转换结束标志,当A/D转换结束时,7脚输出高电平。9脚为A/D转换数据输出允许控制,当OE脚为高电平时,A/D转换数据从该端口输出。10脚为0809的时钟输入端。单片机的P1.5~P1.7、P3端口作1602液晶显示控制。P2端口作A/D转换数据读入用,P0端口用作0809的A/D转换控制。 通过对单片机p3.5口置低电平控制LED亮灯,p3.4口置高电平 东南大学自动控制实验室 实验报告 课程名称:热工过程自动控制原理 实验名称:采样控制系统的分析 院(系):能源与环境学院专业:热能动力姓名:范永学学号:03013409 实验室:实验组别: 同组人员:实验时间:2015.12.15 评定成绩:审阅教师: 实验八 采样控制系统的分析 一、实验目的 1. 熟悉并掌握Simulink 的使用; 2. 通过本实验进一步理解香农定理和零阶保持器ZOH 的原理及其实现方法; 3. 研究开环增益K 和采样周期T 的变化对系统动态性能的影响; 二、实验原理 1. 采样定理 图2-1为信号的采样与恢复的方框图,图中X(t)是t 的连续信号,经采样开关采样后,变为离散信号)(*t x 。 图2-1 连续信号的采样与恢复 香农采样定理证明要使被采样后的离散信号X *(t)能不失真地恢复原有的连续信号X(t),其充分条件为: max 2ωω≥S 式中S ω为采样的角频率,max ω为连续信号的最高角频率。由于T S πω2= ,因而式可为 m ax ωπ≤ T T 为采样周期。 2. 采样控制系统性能的研究 图2-2为二阶采样控制系统的方块图。 图2-2 采样控制系统稳定的充要条件是其特征方程的根均位于Z 平面上以坐标原点为圆心的单位圆内,且这种系统的动、静态性能均只与采样周期T 有关。 由图2-2所示系统的开环脉冲传递函数为: ]2 5.05.01[)1(25])2(2[)1(25])15.0()1(25[)(21212++--=+-=+-==---S S S Z Z S S Z Z S S e Z z G S T ]5.015.0)1([)1(25221T e Z Z Z Z Z TZ Z Z ---+----= 自动控制原理第六章课后习题答案(免费) 线性定常系统的综合 6-1 已知系统状态方程为: ()100102301010100x x u y x ? -???? ? ?=--+ ? ? ? ?????= 试设计一状态反馈阵使闭环系统极点配置为-1,-2,-3. 解: 由()100102301010100x x u y x ? -???? ? ?=--+ ? ? ? ?????=可得: (1) 加入状态反馈阵()0 12K k k k =,闭环系统特征多项式为: 32002012()det[()](2)(1)(2322)f I A bK k k k k k k λλλλλ=--=++++-+--+- (2) 根据给定的极点值,得期望特征多项式: *32()(1)(2)(3)6116f λλλλλλλ=+++=+++ (3) 比较()f λ与*()f λ各对应项系数,可得:0124,0,8;k k k === 即:()408K = 6-2 有系统: ()2100111,0x x u y x ? -????=+ ? ?-????= (1) 画出模拟结构图。 (2) 若动态性能不能满足要求,可否任意配置极点? (3) 若指定极点为-3,-3,求状态反馈阵。 解(1) 模拟结构图如下: (2) 判断系统的能控性; 0111c U ?? =?? -?? 满秩,系统完全能控,可以任意配置极点。 (3)加入状态反馈阵01(,)K k k =,闭环系统特征多项式为: ()2101()det[()](3)22f I A bK k k k λλλλ=--=+++++ 根据给定的极点值,得期望特征多项式: *2()(3)(3)69f λλλλλ=++=++ 比较()f λ与*()f λ各对应项系数,可解得:011,3k k == 即:[1,3]K = 第七章 采样控制系统 例7-1设某离散系统的方框图如图8-1所示,其中参数0T >,0K >,试确定系统稳定时参数K 的取值范围。 图7-1 解: (1) 系统的开环传递函数 1 (1) 1K T G s K s Ts s Ts ??= =-??++() 采样控制系统的开环脉冲传递函数 []000///(1) ()1(1)()T T T T T T z e z z G z Z G s K K z z e z z e ----??==-=??----() 0000/2 ///()()(1) ()1()(1)T T T T T T T T C z G z Kz e R z G z z K Ke e z e -----==++---+ 系统的特征方程为 0002///(1)0T T T T T T z K Ke e z e ---+---+=……………………………………………① 作双线性变换11 w z w +=-代入式①得 ( ) () 0002 ///11(1)011 T T T T T T w w K Ke e e w w ---+++---+=-- ()()()0 22//2/1(1)110T T T T T T w K Ke e w e w ---++----+-= ()0 /2///2(1)2(1)0T T T T T T T T K Ke w e w e K Ke -----+-++-+= 应用劳斯判据可知只需各项系数为正即可。 000000//////02(1)2(1)0012(1)0T T T T T T T T T T T T K Ke e e K e e K Ke ------->?+?->?<? 例7-2某离散系统如图8-2所示,T 为采用周期。(1) 若10=K ,确定使稳态误差111 《单片机数据采集控制系统》课程设计报告一、前言 通常是指有若干相互连接、相互作用的基本电路组成的具有特定功能的电 路整体。由于大规模集成电路和模拟-数字混合集成电路的大量出现,在单 个芯片上可能集成许多种不同种类的电路。 二、课程设计的目的和要求 2.1、课程设计的目的 运用模拟电子技术、数字电子技术、单片机原理及其应用等课程知识,根据题目要求进行软硬件系统的设计和调试,从而加深对本课程知识的理解, 把学过的比较零碎的知识系统化,比较系统的学习开发单片机应用系统的基本步骤和基本方法,使学生应用知识能力、设计能力、调试能力以及报告撰写能力等有一定的提高。 2.2、课程设计要求 用8051单片机设计数据采集控制系统,基本要求如下: 1、可实现8路数据的采集,假设8路信号均为0-5V的电压信号; 2、采集数据可通过数码管显示,显示格式为:[通道号] 电压值,如[01] 4.5 3、可通过键盘设置采集方式;(单点采集、多路巡测、采集时间间隔*) 4、具有异常数据声音报警功能:对第一路数据可设置正常数据的上限值和 下限值,当采集的数据出现异常,发出报警信号。(LED显示报警) 5、可输出8路顺序控制信号,设每路顺序控制信号为一位,顺序控制的流 程为: 三、总体设计 实验原理:从A/D 转换器入手,通过编程,实现硬件上的八路数据采集、采集数据显示、通过键盘设计采集、实现上下限的报警功能、八路顺序控制信号。 四、硬件设计 4.1各种芯片的功能、引脚、相应的命令控制字格式的介绍 1、MCS-51 芯片介绍:MCS-51系列单片机是美国Intel 公司开发的8位单片机又可以分为多个子系列。MCS-51 123456789101112131415403938373635343332313029282726P1.0P1.1P1.2P1.3P1.4P1.5P1.6P1.7RST INT0/P3.2INT1/P3.3V CC P0.0/AD 0P0.1/AD 1P0.2/AD 2P0.3/AD 3P0.4/AD 4P0.5/AD 5P0.6/AD 6P0.7/AD 7EA/V PP ALE/PROG PSEN P2.7/A 15P2.6/A 14P2.5/A 13803180518751 八路数据采集模块 显示模块 键盘模块 报警模块 八路顺序控制模块 8051单片机 北京联合大学 实验报告 实验名称:采样控制系统分析 学院:自动化专业:物流工程姓名:学号: 同组人姓名:学号: 班级:成绩: 实验日期:2014年12月18日 完成报告日期:2014年12月21日 实验5 采样控制系统分析 一.实验目的 1. 掌握判断采样控制系统稳定性的充要条件。 2. 掌握采样周期T对系统的稳定性的影响及临界值的计算。 3. 观察和分析采样控制系统在不同采样周期T时的瞬态响应曲线。 二、实验内容及步骤 1.闭环采样系统构成电路如图5-1所示。掌握采样周期T对系统的稳定性的影响及临界值的计算,观察和分析采样控制系统在不同采样周期T 时的瞬态响应曲线,填入表中。 2. 改变采样控制系统的被控对象,计算和测量系统的临界稳定采样周期T,填入表中。 图5-1 闭环采样系统构成电路 [a].闭环采样系统实验构成电路如图5-1所示,其中被控对象的各环节 参数: 积分环节(A3单元)的积分时间常数Ti=R2*C2=0.2S, 惯性环节(A5单元)的惯性时间常数T=R1*C1=0.5S,增益K=R1/R3=5。 实验步骤:注:(B5)单元的‘S ST’不能用‘短路套’短接! (1)用函数发生器(B5)单元的方波输出作为系统振荡器的采样周期信号。 (D1)单元选择“方波”,(B5)“方波输出”孔输出方波。调节“设定电位器1”控制相应的输出频率。 (2 ) 用信号发生器(B1)的‘阶跃信号输出’和‘幅度控制电位器’构造输入信号R(t): B1单元中电位器的左边K3开关拨下(GND),右边K4开关拨下(0/+5V 阶跃)。阶跃信号输出(B1单元的Y测孔)调整为2.5V(调节方法:调节电位器,用万用表测量Y测孔)。 (3)构造模拟电路:按图5-1安置短路套及测孔联线,表如下。 (4)运行、观察、记录: 三、数据处理(现象分析) ①运行LABACT程序,选择自动自动控制菜单下的采样系统分析实验项目,就会弹出虚拟示波器的界面,点击开始后将自动加载相应源文件,即可使用本实验机配套的虚拟示波器(B3)单元的CH1测孔测量波形。 ②调节“设定电位器1”,D1单元显示方波频率,将采样周期T(B5方波输出)依次调整为15ms(66.6Hz) 、30ms(33.3Hz)和90ms(11.1Hz),按下信号发生器(B1)阶跃信号按钮(0→+2.5V阶跃),使用虚拟示波器CH1观察A6单元输出点OUT(C)的波形。观察相应实验现象,记录波形,并判断其稳定性,填入表5-1。 T=66.6Hz 油井数据采集与远程控制系统设计方案 技 术 设 计 方 案 介 绍 公司简介 我公司专业从事数字网络视频监控系统、智能视频分析、机房动力环境监控、机房建设、雷达测速、闯红灯电子警察抓拍、电子治安卡口、智能控制等智能化系统开发的大型综合型企业,欢迎来电洽谈业务! 质量方针:以人为本、质量第一 公司成立至今,坚持以领先的技术、优良的商品、完善的售后服务、微利提取的原则服务于社会。我公司为您提供的产品,关键设备采用高质量进口合格产品,一般设备及材料采用国内大型企业或合资企业的产品,各种产品企业都通过 ISO9001国际质量体系认证。有一支精良的安防建设队伍,由专业技术人员为您设计,现场有专业技术人员带领施工,有良好职业道德施工人员。我公司用户拥有优质的设计施工质量和优质的售后服务保障。 客户哲学:全新理念、一流的技术、丰富的经验,开创数字新生活 专注——维护世界第一中小企业管理品牌、跟踪业界一流信息技术、传播经营管理理念是莱安永恒不变的追求,莱安坚持“全新的理念、一流的技术、丰富的经验、优质的服务”,专注于核心竞争力 的建设是莱安取得今天成功的根本,也必将是莱安再创辉煌的基础! 分享——“道不同,不相谋”,莱安在公司团队之间以及与股东、渠道伙伴、客户之间均倡导平等、共赢、和谐、协同的合作文化,在迎接外部挑战的过程中,我们共同期待发展和超越,共同分享激情与快乐!“合作的智慧”是决定莱安青春永葆的最终动力! 客户服务:以高科技手段、专业化的服务为客户创造价值 分布于神州大地各行业中的800万中小企业是中国最具活力的经济力量,虽然没有强势的市场影响力和雄厚的资金储备,但无疑,个性张扬的他们最具上升的潜力,后WTO时代市场开放融合,残烈的竞争使他们的发展更加充满变数。基于以上认识,在智能化设备管理市场概念喧嚣的热潮中,独辟“实用主义”产品哲学,莱安将客户视为合作关系,我们提供最为实用的产品和服务,赢得良好的口碑。我们认为,用户企业运做效率的提升是莱安实现社会价值的唯一途径。 承蒙广大用户的厚爱,我公司得以健康发展。在跨入新的世纪后,公司将加快发展速度,充分发挥已有资源,更多地开展行业用户的服务工作,开创新的发展局面。 我公司全体员工愿与社会各界携手共创未来!我们秉承真诚合作精神向广大客户提供相关的系统解决方案,设备销售及技术支持,价格合理,欢迎来人来电咨询、洽谈业务! 油井数据采集与远程控制系统设计方案 一、系统概述 该系统是一套集自动化技术、计算机技术、网络技术、系统工程技术以及油气田开发专业技术于一体,采用高精度微功耗无线传感器,测量载荷、冲程、冲次、油温、油压、套压、回压、转速、电量等工况数据,为用户提供的油田单井管理自动化解决方案,可以对油井的数据进行实时采集、实时分析,还有间抽、采集密度、开关井、远程变频等远程控制功能。 第七章 非线性控制系统分析 练习题及答案 7-1 设一阶非线性系统的微分方程为 3x x x +-=& 试确定系统有几个平衡状态,分析平衡状态的稳定性,并画出系统的相轨迹。 解 令 x =0 得 -+=-=-+=x x x x x x x 321110()()() 系统平衡状态 x e =-+011,, 其中:0=e x :稳定的平衡状态; 1,1+-=e x :不稳定平衡状态。 计算列表,画出相轨迹如图解7-1所示。 可见:当x ()01<时,系统最终收敛到稳定的平衡状态;当x ()01>时,系统发散;1)0(- ?? ?<=-+I I >=++I )0(0:)0(0:x x x x x x x x &&& &&& 令0x x ==&&&,得平衡点:0e x =。 系统特征方程及特征根: 2 1,2 21,21:10,()2:10, 1.618,0.618 () s s s s s s I II ?++==-±?? ?+-==-+? 稳定的焦点鞍点 (, ) , , x f x x x x dx dx x x x dx dx x x x x x ==--=--==--=-+=αα β11 1 ??? ? ??? <-= >--=) 0(11 :II ) 0(1 1: I x x β αβ α 计算列表 用等倾斜线法绘制系统相平面图如图解7-2(a )所示。 《电子技术》 2002 年第 9 期 中国传感器 ht t p :/ / www . senso r . co m . cn (531) 19 计算机应用 桩基静载仪数据采集及控制系统的 研制与开发 武汉大学电子信息学院 (武汉 430072) 刘仲谋 吴建江 刘爱荣 摘 要 文章系统地分析了基于虚拟仪器技术下的桩基静载测试仪数据采集系统的特性 。详 细论述了系统的总体设计方案 ,数据采集 、通信和控制电路的设计以及系统的可靠性设计 。 关键词 虚拟仪器 通信 可靠性 虚拟仪器就是采用计算机技术 ,将传统仪器的 部分或全部功能由软件来实现 ,达到了硬件软件化 的目的 。基于虚似仪器技术的静载仪是代表桩基静 载测试仪器的发展方向 。采用虚似仪器技术 ,前置 机只需要对信号的采集和控制 ,而把复杂的数据处 理 、报表 、打印输出等让上位机处理 ,简化了设计过 程 ,缩短了研制周期 ,降低了设计难度 ,同时提供了 更良好的人机界面和强大的上位机操作功能 。目 前 ,国内的静载仪的制作主要仍然采用传统的方法 , 对实验数据进行采集 、显示 、记录和判断等工作 ,但 不能现场对数据进行处理 ,得到工程所需的曲线 、图 表等资料 。采用虚拟仪器技术能很好地实现这些功 能 ,前置机对现场数据进行采集 、控制加在桩上的压 力以及和上位机进行通信 ,上位机接收来自前置机 的十二路位移信号和两路压力信号 ,然后进行数据 处理 、图表分析 ( 主要是桩基测量的总报表 、P 2S 曲 线图 、S 2lgp 曲线图和 S 2lgt 曲线图分析) 、发出控制 信号等 。下面主要对前置机的硬件设计和系统的可 靠性进行重点分析 。 1 前置机总体设计方案 前置机采集各路传感器的输出信号 ,并将采集 到的数据送给上位机进行数据处理 、图表分析 、显 示 、判断 ,同时接收上位机发来的各芯片初始化指令 及控制命令 ,来初始化系统和控制加在桩上的压力 等 。设计中采用 A T89C51 单片机加上外围电路来 构成前置机 。前置机系统的结构框图如图 1 所示 。 包括十二路位移量采集电路 、两路压力量采集电路 、 油泵流量控制电路 、开关控制电路 、RS485 接口 、监 控电路 、键盘显示电路和电源电路 。 设计中 ,为了尽可能满足现场的各种需要 ,采用 图 1 前置机系统结构框 了具有两个独立的荷载测试通道 ,其一用于连接应 变式压力传感器 ,另一个用于连接变送式压力传感 器 ,同时允许两个测力传感器并联使用 。提供十二 个独立的位移测试通道 ,其中四个测量桩基沉降量 , 另八个测量锚桩上拔量 。采用了两路各自独立的油 泵控制输出 ,油泵流量控制和开关控制输出 ,开关控 制用来直接采用高压油泵启停 ,是用于要求不高的 荷载试验 。油泵流量控制采用了自适应控制技术 , 可自动调节高压油泵流量 ,使荷载超调量极小 ,能进 行自动补载 、自动卸载 ,且不需人工干预 。这样 ,在 测量过程中可根据实际需要灵活设置压力 、位移传 感器的数目和通道以及控制方式 ,很好地满足了测 试现场的各种需求 。 2 数据采集 、控制和通信的实现 2 . 1 十二路位移信号的采集 传感器采用容栅式位移传感器 ,传感器共有四 根引线 ,分别是电源线 、地线 、数据信号线和时钟线 , 电源电压为 1 . 5V ,信号格式如图 2 所示 。 由传感器的输出信号格式可以看出 ,传感器每 250 ms 输出一帧数据 ,每一帧数据包括两组 24bit 的 数据 ,第一组为总位移 ,第二组为总位移减去基准零 第七章 习题与答案 7-1 离散控制系统由哪些基本环节组成? 答:离散控制系统由连续的控制对象,离散的控制器,采样器和保持器等几个环节组成。 7-2 香农采样定理的意义是什么? 答:香农采样定理给出了采样周期的一个上限。 7-3 什么是采样或采样过程? 答:采样或采样过程,就是抽取连续信号在离散时间瞬时值序列的过程,有时也称为离散化过程。 7-4 写出零阶保持器的传递函数,引入零阶保持器对系统开环传递函数的极点有何影响? 答:零阶保持器的传递函数为s e s H Ts --=1)(0。零阶保持器的引入并不影响开环系统 脉冲传递函数的极点。 7-5 线性离散控制系统稳定的充要条件是什么? 答:线性离散控制系统稳定的充要条件是: 闭环系统特征方程的所有根的模1 湖南工业大学科技学院 毕业设计(论文)开题报告 (2012届) 教学部:机电信息工程教学部 专业:电子信息工程 学生姓名:肖红杰 班级: 0801 学号 0812140106 指导教师姓名:杨韬仪职称讲师 2011年12 月10 日 题目:基于单片机的数据采集系统的控制器设计 1.结合课题任务情况,查阅文献资料,撰写1500~2000字左右的文献综述。 近年来,数据采集及其应用技术受到人们越来越广泛的关注,数据采集系统在各行各业也迅速的得到应用。如在冶金、化工、医学、和电器性能测试等许多场合需要同时对多通道的模拟信号进行采集、预处理、暂存和向上位机传送、再由上位机进行数据分析和处理,信号波形显示、自动报表生成等处理,这些都需要数据采集系统来完成。但很多数据采集系统存在功能单一、采集通道少、采集速率低、操作复杂、并且对操作环境要求高等问题。人们需要一种应用范围广、性价比高的数据采集系统,基于单片机的数据采集系统具有实现处理功能强大、处理速度快、显示直观,性价比高、应用广泛等特点,可广泛应用于工业控制、仪器、仪表、机电一体化,智能家居等诸多领域。总之,无论在那个应用领域中,数据采集与处理越及时,工作效率就超高,取得的经济效益就越大。 数据采集系统的任务,就是采集传感器输出的模拟信号转换成计算机能识别的信号,并送入计算机,然后将计算得到的数据进行显示或打印,以便实现对某些物理量的监测,其中一些数据还将被生产过程中的计算机控制系统用来控制某些物理量。 数据采集系统的市场需求量大,特别是随着技术的发展,可用数据器为核心构成一个小系统,而目前国内生产的主要是数据采集卡,存在无显示功能、无记忆存储功能等问题,其应用有很大的局限性,所以开发高性能的,具有存储功能的数据采集产品具有很大的市场前景。 随着电子技术的迅速发展,,一些高性能的电子芯片不断推出,为我们进行电子系统设计提供的更多的选择和更多的方便,单片机具有体积小、低功耗、使用方便、处理精度高、性价比高等优点,这些都使得越来越广泛的选用单片机作为数据采集系统的核心处理器。一些高性能的A/D转换芯片的出现也为数据采集系统的设计提供了更多的方便,无论是采集精度还是采样速度都比以前有了较大的提高。其中一些知名的大公司如MAXIM公司、TI公司、ADI公司都有推出性能比效突出的 A/D转换芯片,这些芯片普通具有低功耗、小尺寸的特点,有些芯片还具有多通道的同步转换功能。这些芯片的出现,不仅因为芯片价格便宜,能够降低系统设计的成本,而且可以取代以前繁琐的设计方法,提高系统的集成度。 数据采集器是目前工业控制中应用较多的一类产品,数据采集器的研制已经相当成熟,而且数据采集器的各类不断增多,性能越来越好,功能也越来越强大。 在国外,数据采集器已发展的相当成熟,无论是在工业领域,还是在生活中的应用,比如美国FLUKE公司的262XA系列数据采集器是一种小型、便携、操作简单、使用灵活的数据采集器,它既可单独使用又可和计算机连接使用,它具有多种测量 热工过程自动控制原理实验报告 白思平 03015413 实验八 采样控制系统的分析 一、实验目的 1. 熟悉并掌握Simulink 的使用; 2. 通过本实验进一步理解香农定理和零阶保持器ZOH 的原理及其实现方法; 3. 研究开环增益K 和采样周期T 的变化对系统动态性能的影响; 二、实验原理 1. 采样定理 图2-1为信号的采样与恢复的方框图,图中X(t)是t 的连续信号,经采样开关采样后,变为离散信号)(* t x 。 图2-1 连续信号的采样与恢复 香农采样定理证明要使被采样后的离散信号X *(t)能不失真地恢复原有的连续信号X(t),其充分条件为: max 2ωω≥S 式中S ω为采样的角频率,m ax ω为连续信号的最高角频率。由于T S π ω2=,因而式可为 max ωπ ≤T T 为采样周期。 2. 采样控制系统性能的研究 图2-2为二阶采样控制系统的方块图。 图2-2 采样控制系统稳定的充要条件是其特征方程的根均位于Z 平面上以坐标原点为圆心的单位圆,且这种系统的动、静态性能均只与采样周期T 有关。 由图2-2所示系统的开环脉冲传递函数为: ]2 5 .05.01[)1(25])2(2[)1(25])15.0()1(25[)(21212++--=+-=+-==---S S S Z Z S S Z Z S S e Z z G S T ]5.015.0)1([ )1(25221 T e Z Z Z Z Z TZ Z Z ---+----= ) )(1()]21()12[(5.122222T T T T e Z Z Te e Z e T --------++-= 闭环脉冲传递函数为: )]21(]12[5.12)1()]21(12[5.12)()(222222 222T T T T T T T T Te e Z e T e Z e Z Te e Z e T z R z C ----------++-+++---++-=)( 5 .12)5.1125()5.115.1325()] 21(12[5.12222222++-+-+--++-=-----T e Z e T Z Te e Z e T T T T T T )( 根据上式,根据朱利判据可判别该采样控制系统否稳定,并可用迭代法求出该系统的阶跃输出响应。 三、实验设备: 装有Matlab 软件的PC 机一台 四、实验容 1. 使用Simulink 仿真采样控制系统 2. 分别改变系统的开环增益K 和采样周期T S ,研究它们对系统动态性能及稳态精度的影响。 五、实验步骤 5-1. 验证香农采样定理 利用Simulink 搭建如下对象,如图2-3。 图2-3 设定正弦波的输入角频率w = 5,选择采样时间T 分别为0.01s 、0.1s 和1s ,观察输入输出波形,并结合香农定理说明原因。 5-2.采样系统的动态特性 利用Simulink 搭建如下二阶系统对象,如图2-4。 当系统的增益K=10,采样周期T 分别取为0.003s ,0.03s ,0.3s 进行仿真实验。 更改增益K 的值,令K=20,重复实验一次。 系统对象simulink 仿真图: SCADA(Supervisory Control And Data Acquisition)系统,即数据采集与监视控制系统。SCADA系统的应用领域很广,它可以应用于电力系统、给水系统、石油、化工等领域的数据采集与监视控制以及过程控制等诸多领域。在电力系统以及电气化铁道上又称远动系统。SCADA系统是以计算机为基础的生产过程控制与调度自动化系统。它可以对现场的运行设备进行监视和控制,以实现数据采集、设备控制、测量、参数调节以及各类信号报警等各项功能。由于各个应用领域对SCADA的要求不同,所以不同应用领域的SCADA系统发展也不完全相同。 在电力系统中,SCADA系统应用最为广泛,技术发展也最为成熟。它作为能量管理系统(EMS系统)的一个最主要的子系统,有着信息完整、提高效率、正确掌握系统运行状态、加快决策、能帮助快速诊断出系统故障状态等优势,现已经成为电力调度不可缺少的工具。它对提高电网运行的可靠性、安全性与经济效益,减轻调度员的负担,实现电力调度自动化与现代化,提高调度的效率和水平中方面有着不可替代的作用。 SCADA在铁道电气化远动系统上的应用较早,在保证电气化铁路的安全可靠供电,提高铁路运输的调度管理水平起到了很大的作用。在铁道电气化SCADA系统的发展过程中,随着计算机的发展,不同时期有不同的产品,同时我国也从国外引进了大量的SCADA产品与设备,这些都带动了铁道电气化远动系统向更高的目标发展。 SCADA在石油管道工程中占有重要的地位,如用在系统管理石油管道的顺序控制输送、设备监控、数据同步传输记录,监控管道沿线及各站控系统运行状况等。各站场的站控系统作为管道自动控制系统的现场控制单元,除完成对所处站场的监控任务外,同时负责将有关信息传送给调度控制中心并接受和执行其下达的命令,并将所有的数据记录储存。除此之外的基本功能,现在的SCADA管道系统还具备泄露检测、系统模拟、水击提前保护等新功能。 石油方面应用 目前,国外已广泛采用SCADA系统来实现对城市燃气管道的自动监控和自动保护,并已发展成为燃气管道自动控制系统的基本模式。SCADA系统的工作原理是:根据数据采集系统获得的系统运行工况参数与设计工况参数的比较结果,然后通过由调节阀和与之配套的电动、气动、电液联动或气液联动执行机构以及检测被调参数的仪表等组成的自动调节系统对某些偏离设计工况的运行参数进行自动纠偏调节。 发展历程 实验十 采样控制系统的分析 一、实验目的 2. 熟悉用LF398组成的采样控制系统; 3. 通过本实验进一步理解香农定理和零阶保持器ZOH 的原理及其实现方法; 3. 观察系统在阶跃作用下的稳态误差。研究开环增益K 和采样周期T 的变化对系统动态性能的影响; 二、实验设备 同实验一 三、实验内容 1. 利用实验平台设计一个对象为二阶环节的模拟电路,并与采样电路组成一个数-模混合系统。 2. 分别改变系统的开环增益K 和采样周期T S ,研究它们对系统动态性能及稳态精度的影响。 四、实验原理 1. 采样定理 图11-1为信号的采样与恢复的方框图,图中X(t)是t 的连续信号,经采样开关采样后,变为离散信号)(*t x 。 图10-1 连续信号的采样与恢复 香农采样定理证明要使被采样后的离散信号X *(t)能不失真地恢复原有的连续信号X(t),其充分条件为: max 2ωω≥S (10.1) 式中S ω为采样的角频率,max ω为连续信号的最高角频率。由于T S πω2= ,因而式(10.1)可写为 m ax ωπ≤ T (10.2) T 为采样周期。 采样控制系统稳定的充要条件是其特征方程的根均位于Z 平面上以坐标原点为圆心的单位圆内,且这种系统的动、静态性能均只与采样周期T 有关。 2. 采样控制系统性能的研究 图10-2为二阶采样控制系统的方块图。 图10-2 二阶采样控制系统方块图 由图10-2所示系统的开环脉冲传递函数为: ]25.05.01[)1(25])2(2[)1(25])15.0()1(25[)(21212++--=+-=+-==---S S S Z Z S S Z Z S S e Z z G S T T e Z Z Z Z Z TZ Z Z 2215.015.0)1([)1(25---+----= ) )(1()21(]12[5.122222T T T T e Z Z Te e Z e T --------++-= 闭环脉冲传递函数为: )] 21(]12[5.12)1()]21(]12[5.12)()(222222222T T T T T T T T Te e Z e T e Z e Z Te e Z e T z R z C ----------++-+++---++-= ) 255.1152.12()5.115.1325()]21(]12[5.1222222222T T T T T T T Te e T e Z e T Z Te e Z e T ---------+++----++-= 根据上式可判别该采样控制系统否稳定,并可用迭代法求出该系统的阶跃输出响应。 五、实验步骤 1. 零阶保持器 本实验采用“采样-保持器”组件LF398,它具有将连续信号离散后的零阶保持器输出信号的功能。图10-3为采样-保持电路。图中MC14538为单稳态电路,改变输入方波信号的周期,即改变采样周期T 。 图10-3 采样保持电路 图中方波信号由实验台的低频信号发生器提供。 接好“采样保持电路”的电源。用上位软件的“信号发生器”输出一个频率为5Hz 、幅值为2V 的正弦信号输入到“采样保持电路”的信号输入端。在下列几种情况下用示波器观察“采样保持电路”的信号输出端。 1.1 当方波(采样产生)信号为100 Hz 时; 1.2 当方波(采样产生)信号为50 Hz 时; 1.3 当方波(采样产生)信号为10Hz 时; 注:方波的幅值要尽可能大。 2. 采样系统的动态性能 根据图10-2二阶采样控制系统方块图,设计并组建该系统的模拟电路,如图10-4所示。自动控制原理第六章
数据采集与监视控制系统
自动控制原理习题第六章
数据采集及管理控制系统设计规范
8路数据采集及报警控制系统 ADC0809
采样控制系统的分析讲解
自动控制原理第六章课后习题答案
自动控制原理第七章采样控制系统
单片机数据采集控制系统
采样控制系统分析
油井数据采集与远程控制系统设计方案
自动控制原理考试试题第七章习题及答案
数据采集及控制
第7章 线性离散控制系统的分析 参考答案
数据采集系统
采样控制系统的分析
数据采集与监控系统SCADA
实验十采样控制系统的分析
相关主题
文本预览