自动控制原理胡寿松 第7章
- 格式:ppt
- 大小:1.24 MB
- 文档页数:56
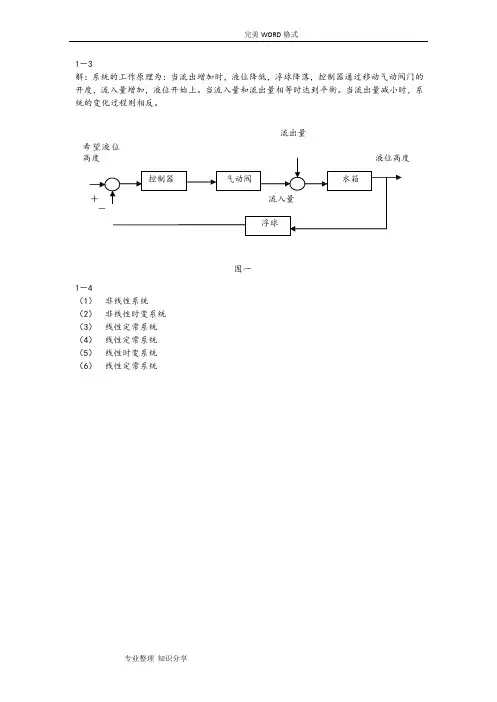
1-3解:系统的工作原理为:当流出增加时,液位降低,浮球降落,控制器通过移动气动阀门的开度,流入量增加,液位开始上。
当流入量和流出量相等时达到平衡。
当流出量减小时,系统的变化过程则相反。
流出量希望液位图一1-4(1)非线性系统(2)非线性时变系统(3)线性定常系统(4)线性定常系统(5)线性时变系统(6)线性定常系统2 2-1 解:显然,弹簧力为 kx (t ) ,根据牛顿第二运动定律有:F (t ) − kx (t ) = m移项整理,得机械系统的微分方程为:d 2x (t ) dt 2m d x (t ) + kx (t )= F (t ) dt2对上述方程中各项求拉氏变换得:ms 2 X (s ) + kX (s ) =F (s )所以,机械系统的传递函数为:G (s ) = X (s ) =F (s )1ms 2+k2-2 解一:由图易得:i 1 (t )R 1 = u 1 (t ) − u 2 (t ) u c (t ) + i 1 (t )R 2 = u 2 (t ) du c (t )i 1 (t )= Cdt 由上述方程组可得无源网络的运动方程为:C ( R + R ) du 2 (t ) u (t ) = CRdu 1 (t ) u (t )1 2 dt+ 22 + 1 dt 对上述方程中各项求拉氏变换得:C (R 1 + R 2 )sU 2 (s ) + U 2 (s ) = CR 2 sU 1 (s ) + U 1 (s )所以,无源网络的传递函数为:G (s ) = U 2 (s ) =U 1 (s )1 + sCR 21 + sC (R 1 +R 2 ) 解二(运算阻抗法或复阻抗法):U (s ) 1 + R 2 1 + R Cs2 = Cs =2U (s ) R + 1 + R 1 + ( R + R )Cs 1 1 21Cs22-5 解:按照上述方程的顺序,从输出量开始绘制系统的结构图,其绘制结果如下图所示:依次消掉上述方程中的中间变量 X 1 , X 2 , X 3 , 可得系统传递函数为:C (s ) = R (s )G 1 (s )G 2 (s )G 3 (s )G 4(s )1 + G2 (s )G3 (s )G 6 (s ) + G 3 (s )G4 (s )G5 (s ) + G 1 (s )G 2 (s )G 3 (s )G 4(s )[G 7 (s ) − G 8 (s )]2-6 解:①将G1 (s) 与G1 (s) 组成的并联环节和G1 (s) 与G1 (s) 组成的并联环节简化,它们的等效传递函数和简化结构图为:G 12 (s) = G1(s) + G2(s)G 34 (s) = G3(s) −G4(s)②将G12 (s), G34 (s) 组成的反馈回路简化便求得系统的闭环传递函数为:2-7 解:C(s)=R(s)G12(s)1 + G12(s)G34(s)=G1(s) + G2(s)1 +[G1(s) + G2(s)][G3(s) −G4(s)]由上图可列方程组:[E(s)G1 (s) −C(s)H2(s)]G2(s) = C(s)R(s) −H1(s)C(s)G2(s)= E(s)联列上述两个方程,消掉E (s) ,得传递函数为:C(s)= R(s)G1(s)G2(s)1 + H1(s)G1(s) + H2(s)G2(s)联列上述两个方程,消掉C (s) ,得传递函数为:E(s)= R(s)1 + H2(s)G2(s)1 + H1(s)G1(s) + H2(s)G2(s)1 22 23 2-8 解:将①反馈回路简化,其等效传递函数和简化图为: 0.4G (s ) =2s + 1 =1 +0.4 * 0.5 2s + 15+ 3将②反馈回路简化,其等效传递函数和简化图为:1 G (s ) = s + 0.3s + 1 = 5s + 3 21 + 0.4 5s + 4.5s + 5.9s + 3.4(s + 0.3s + 1)(5s + 3)将③反馈回路简化便求得系统的闭环传递函数为:0.7 * (5s +3)Θo (s)= 5s 3 + 4.5s 2 + 5.9s + 3.4=3.5s + 2.1Θi (s) 1 +0.7 * Ks(5s +3)5s3+ (4.5 +3.5K )s 2+ (5.9 + 2.1K )s +3.42 5s3-3 解:该二阶系统的最大超调量:σp =e−ζπ/1−ζ2*100%当σp= 5% 时,可解上述方程得:ζ=0.69当σp= 5% 时,该二阶系统的过渡时间为:ts≈3ζwn所以,该二阶系统的无阻尼自振角频率w n 3-4 解:≈3ζts=30.69*2= 2.17由上图可得系统的传递函数:10 * (1 + Ks)C (s)= R(s)s(s + 2)1 +10 * (1 +Ks)s(s + 2)==10 * (Ks +1)s + 2 * (1 +5K )s +10所以w n =10 ,ζwn=1 +5K⑴若ζ= 0.5 时,K ≈0.116所以K ≈0.116时,ζ= 0.5⑵系统单位阶跃响应的超调量和过渡过程时间分别为:σ p = e−ζπ / 1−ζ2*100% = e−0.5*3.14 /1−0.52*100% ≈ 16.3%t s =3 ζw n= 3 0.5 *≈ 1.910⑶ 加入 (1 + Ks ) 相当于加入了一个比例微分环节,将使系统的阻尼比增大,可以有效地减小原系统的阶跃响应的超调量;同时由于微分的作用,使系统阶跃响应的速度(即变w 212p化率)提高了,从而缩短了过渡时间:总之,加入 (1 + Ks ) 后,系统响应性能得到改善。
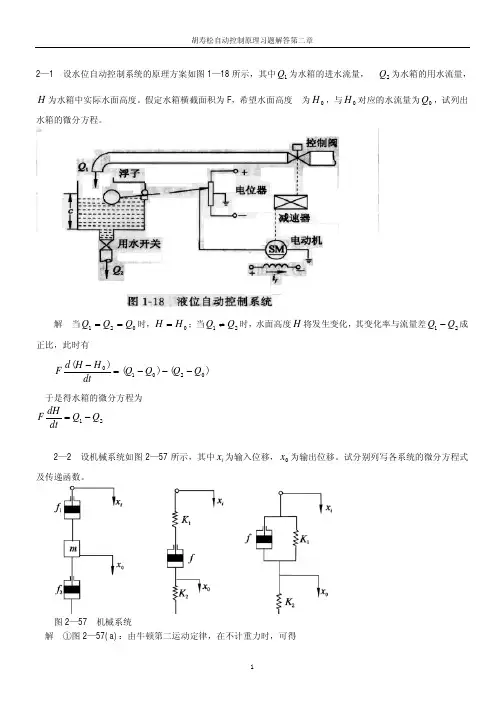
第 一 章1-1 图1-2是液位自动控制系统原理示意图。
在任意情况下,希望液面高度c 维持不变,试说明系统工作原理并画出系统方块图。
图1-2 液位自动控制系统解:被控对象:水箱;被控量:水箱的实际水位;给定量电位器设定水位r u (表征液位的希望值r c );比较元件:电位器;执行元件:电动机;控制任务:保持水箱液位高度不变。
工作原理:当电位电刷位于中点(对应r u )时,电动机静止不动,控制阀门有一定的开度,流入水量与流出水量相等,从而使液面保持给定高度r c ,一旦流入水量或流出水量发生变化时,液面高度就会偏离给定高度r c 。
当液面升高时,浮子也相应升高,通过杠杆作用,使电位器电刷由中点位置下移,从而给电动机提供一定的控制电压,驱动电动机,通过减速器带动进水阀门向减小开度的方向转动,从而减少流入的水量,使液面逐渐降低,浮子位置也相应下降,直到电位器电刷回到中点位置,电动机的控制电压为零,系统重新处于平衡状态,液面恢复给定高度r c 。
反之,若液面降低,则通过自动控制作用,增大进水阀门开度,加大流入水量,使液面升高到给定高度r c。
系统方块图如图所示:1-10 下列各式是描述系统的微分方程,其中c(t)为输出量,r (t)为输入量,试判断哪些是线性定常或时变系统,哪些是非线性系统?(1)222)()(5)(dt t r d t t r t c ++=;(2))()(8)(6)(3)(2233t r t c dt t dc dt t c d dt t c d =+++; (3)dt t dr t r t c dt t dc t )(3)()()(+=+; (4)5cos )()(+=t t r t c ω; (5)⎰∞-++=t d r dt t dr t r t c ττ)(5)(6)(3)(;(6))()(2t r t c =;(7)⎪⎩⎪⎨⎧≥<=.6),(6,0)(t t r t t c解:(1)因为c(t)的表达式中包含变量的二次项2()r t ,所以该系统为非线性系统。
第六版前言第一章自动控制的一般概念1-1 自动控制的基本原理与方式1-2 自动控制系统示例1-3 自动控制系统的分类1-4 对自动控制系统的基本要求1-5 自动控制系统的分析与设计工具习题第二章控制系统的数学模型2-1 控制系统的时域数学模型2-2 控制系统的复数域数学模型2-3 控制系统的结构图与信号流图2-4 控制系统建模实例习题第三章线性系统的时域分析法3-1 系统时间响应的性能指标3-2 一阶系统的时域分析3-3 二阶系统的时域分析3-4 高阶系统的时域分析3-5 线性系统的稳定性分析3-6 线性系统的稳态误差计算3-7 控制系统时域设计习题第四章线性系统的根轨迹法4-1 根轨迹法的基本概念4-2 根轨迹绘制的基本法则4-3 广义根轨迹4-4 系统性能的分析4-5 控制系统复域设计习题第五章线性系统的频域分析法5-1 频率特性5-2 典型环节与开环系统的频率特性5-3 频率域稳定判据5-4 稳定裕度5-5 闭环系统的频域性能指标5-6 控制系统频域设计习题第六章线性系统的校正方法6-1 系统的设计与校正问题6-2 常用校正装置及其特性6-3 串联校正6-4 前馈校正6-5 复合校正6-6 控制系统校正设计习题第七章线性离散系统的分析与校正7-1 离散系统的基本概念7-2 信号的采样与保持7-3 z变换理论7-4 离散系统的数学模型7-5 离散系统的稳定性与稳态误差7-6 离散系统的动态性能分析7-7 离散系统的数字校正7-8 离散控制系统设计习题第八章非线性控制系统分析8-1 非线性控制系统概述8-2 常见非线性特性及其对系统运动的影响8-3 相平面法8-4 描述函数法8-5 非线性控制的逆系统方法8-6 非线性控制系统设计习题第九章线性系统的状态空间分析与综合9-1 线性系统的状态空间描述9-2 线性系统的可控性与可观测性9-3 线性定常系统的反馈结构及状态观测器9-4 李雅普诺夫稳定性分析9-5 控制系统状态空间设计习题第十章动态系统的最优控制方法10-1 最优控制的一般概念10-2 最优控制中的变分法10-3 极小值原理及其应用10-4 线性二次型问题的最优控制10-5 控制系统优化设计。