自动控制原理第7章01
- 格式:ppt
- 大小:2.21 MB
- 文档页数:54


7.1 求下列矩阵的若尔当型及其变换矩阵(1)010001341⎡⎤⎢⎥⎢⎥⎢⎥---⎣⎦解:矩阵的特征值为:1230.78,0.11 1.95,0.11 1.95i i λλλ=-=-+=--,因此可化为对角线规范型:0.780.11 1.950.11 1.95ii -⎡⎤⎢⎥-+⎢⎥⎢⎥--⎣⎦变换矩阵为:1232221231111110.780.11 1.950.11 1.950.61-3.8 - 0.42i -3.8 + 0.42i P i i λλλλλλ⎡⎤⎡⎤⎢⎥⎢⎥==--+--⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦(2)540430461⎡⎤⎢⎥--⎢⎥⎢⎥-⎣⎦解:矩阵的特征值为:1231λλλ===,()2rank I A -=,表明1λ=的几何重数为3-()rank I A -=1,即该特征值对应一个若尔当块。
所以该矩阵的若尔当型为:11111⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦,变换矩阵0410404040P ⎡⎤⎢⎥=-⎢⎥⎢⎥--⎣⎦(3)421043521⎡⎤⎢⎥⎢⎥⎢⎥-⎣⎦解:矩阵的特征值为:1232, 2.21, 6.79λλλ=-==,因此可化为对角线规范型:2 2.21 6.79-⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦,变换矩阵为00.40.610.410.370.780.810.350.46P ⎡⎤⎢⎥=-⎢⎥⎢⎥--⎣⎦(4)010001340⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦解:矩阵的特征值为:1232.3,1, 1.3λλλ==-=-,因此可化为对角线规范型:2.31 1.3⎡⎤⎢⎥-⎢⎥⎢⎥-⎣⎦,变换矩阵为30.1 2.130.25 2.7530.583.58P -⎡⎤⎢⎥=-⎢⎥⎢⎥-⎣⎦7.2已知系统状态方程,求状态变换阵P ,使系统变为对角线型(假设系统的特征值为123,,λλλ)(1)012010001x x a a a ⎡⎤⎢⎥=⎢⎥⎢⎥---⎣⎦解:123222123111P λλλλλλ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦(2)123100100a x a x a -⎡⎤⎢⎥=-⎢⎥⎢⎥-⎣⎦解:系统的特征方程为:32123det()00I A a a a λλλλ-=⇒+++= 设变换矩阵123[,,],i i i i P v v v v Av v λ==满足 设123[,,]Ti i i i v v v v =,则有:11212132313(1)(2)(3)i i i i i i i i i i i a v v v a v v v a v v λλλ-+=⎧⎪-+=⎨⎪-=⎩ 由(1)得211()(4)i i i v a v λ=+由(2)(4)得23121()(5)i i i i v a a v λλ=++ 代入(3)得321123()0i v a a a λλλ+++=所以1i v 是任意常数,取为1,则21i i v a λ=+,2312i i i v a a λλ=++所以112131222111221223132111P a a a a a a a a a λλλλλλλλλ⎡⎤⎢⎥=+++⎢⎥⎢⎥++++++⎣⎦7.3证明:对于具有互相不同特征值12,,,n λλλ 的矩阵1211000010000010000n n a a A a a --⎡⎤⎢⎥-⎢⎥⎢⎥=⎢⎥-⎢⎥⎢⎥-⎣⎦能将其变换为对角矩阵形式的变换矩阵为:11122111212121211111111n n n n n n n n n n n a a P a a a a a a a a λλλλλλλλλλ------⎡⎤⎢⎥++⎢⎥⎢⎥=++++⎢⎥⎢⎥⎢⎥++++++⎣⎦证明:系统的特征方程为:111det()00nn n n I A a a a λλλλ---=⇒++++=设变换矩阵12[,,,],n i i i i P v v v v Av v λ== 满足 设12[,,,]Ti i i in v v v v = ,则有:21111212213231211211111111()()()(1)0(2)i i i i i i i i i i i i i i i n n n i in i in in i i n i n i i in i in n i v a v a v v v a v v v v a a v a v v v v a a v a v v v a v λλλλλλλλλλ-----=+⎧-+=⎧⎪⎪-+==++⎪⎪⎪⎪⇒⎨⎨⎪⎪-+==+++⎪⎪-=⎪⎪+=⎩⎩将(1)代入(2)得11110n n i i n i n i a a a v λλλ--++++= 对比系统特征方程可知11i v =满足。

第七章 线性离散系统的分析与校正7-1 试根据定义∑∞=-*=0)()(n nTs e nT e s E确定下列函数的)(s E *和闭合形式的)(z E :⑴ t t e ωsin )(=;⑵ ))()((1)(c s b s a s s E +++=,b a ≠,c a ≠,c b ≠。
解:Ts e z =;⑴ )()sin()(0z E enT s E n nTs==∑∞=-*ω;1)cos(2)sin(21}{21)(20+-=⎥⎦⎤⎢⎣⎡---=-=-∞=--∑z T z z T e z z e z z j e e e j z E T j T j n nTsjwnT jwnT ωωωω。
⑵ ))()((1))()((1))()((1)(c s c b c a b s b c b a a s a c a b s E +--++--++--=; ∑∑∑∞=--∞=--∞=--*--+--+--=000))((1))((1))((1)(n nTs cnT n nTsbnT n nTs anT e e c b c a e e b c b a e e a c a b s E ; ))()(())()(())()(()(cTbT aT e z c b c a ze z b c b a z e z a c a b z z E ------+---+---=; 记))()((c b c a b a ---=∆,∆-=b a k 1,∆-=ca k 2,∆-=cb k 3;))()(()()()()(3)(2)(12321cTbT aT T c b T c a T b a aT bT cT e z e z e z ze k e k e k z e k e k e k z E ---+-+-+-------+-++-=。
7-2 采样周期为T ,试求下列函数的Z 变换:⑴ n a nT e =)(; ⑵ t e t t e 32)(-=;⑶ 3!31)(t t e =; ⑷ 21)(ss s E +=;⑸ )1(1)(2+-=-s s e s E sT 。
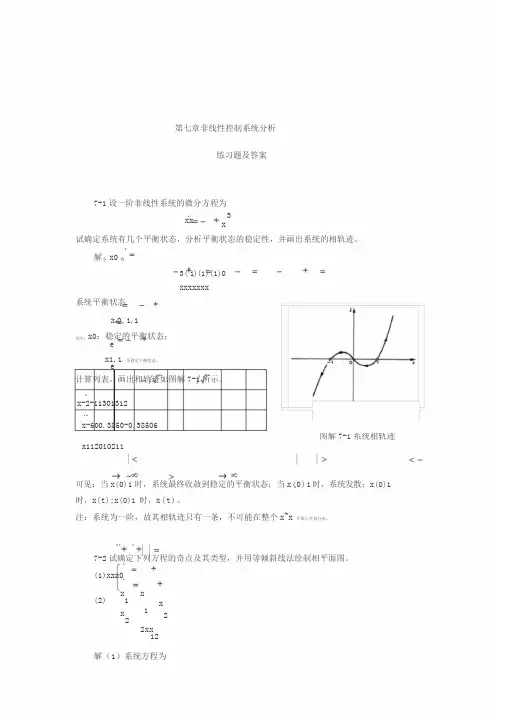
第七章非线性控制系统分析练习题及答案7-1设一阶非线性系统的微分方程为xx3 x试确定系统有几个平衡状态,分析平衡状态的稳定性,并画出系统的相轨迹。
解令x0得3(21)(1)(1)0xxxxxxx系统平衡状态x e0,1,1其中:x0:稳定的平衡状态;ex1,1:不稳定平衡状态。
e计算列表,画出相轨迹如图解7-1所示。
x-2-11301312x-600.3850-0.38506x112010211图解7-1系统相轨迹可见:当x(0)1时,系统最终收敛到稳定的平衡状态;当x(0)1时,系统发散;x(0)1 时,x(t);x(0)1时,x(t)。
注:系统为一阶,故其相轨迹只有一条,不可能在整个x~x平面上任意分布。
7-2试确定下列方程的奇点及其类型,并用等倾斜线法绘制相平面图。
(1)xxx0(2) x1x2xx122xx12解(1)系统方程为1:xxx0(x0):xxx0(x0)令xx0,得平衡点:x e0。
系统特征方程及特征根:132:ss10,sj(稳定的焦点)1,2222:ss10,s1.618,0.618(鞍点)1,2xf(x,x)xx, d xdxxxxdx dx 1xx,1xxx11I:1(x0)1II:1(x0)计算列表-∞-3-1-1/301/313∞x0:11-1-2/302-∞-4-2-4/3-1x0:11-1-4/3-2-4∞20-2/3-1用等倾斜线法绘制系统相平面图如图解7-2(a)所示。
2图解7-2(a)系统相平面图(2)xxx112①x22xx②12由式①:x2x1x1③式③代入②:(x1x1)2x1(x1x1)即x12x1x10④令x1x10得平衡点:x e0由式④得特征方程及特征根为2.4142ss2101,2(鞍点)0.414画相轨迹,由④式xx 11 d x1dxx12x1x1x 1 x1 2计算列表322.53∞11.52=1/(-2)∞210-1-2∞用等倾斜线法绘制系统相平面图如图解7-2(b)所示。
自动控制原理第7章习题解7-1 求下列采样的离散信号x *(t )及离散拉斯变换X *(s ) ① ()t te t x α-=; ② ()t e t x t ωαsin -=; ③()t t t x ωcos 2=; ④ ()t te t x 4-=; 解:① ()t te t x α-=()()[][]()211111011111--------+∞=----+∞=---=⎥⎦⎤⎢⎣⎡-====∑∑z e z Te z e dz d Tz z e dz d Tz ztekT x Z z X T T T k k kT k kkTααααα ② ()t e t x t ωαsin -=()()[][][]()()()()211cos 1sin sin sin ---∞+=-∞+=--+-====∑∑z e zekT z e kT zekT zkT ekT x Z z X kTkTkT k kkTk kkTαααααωωωω③()t t t x ωcos 2=()()[]()[]()()()()⎭⎬⎫⎩⎨⎧⎥⎦⎤⎢⎣⎡+--=⎭⎬⎫⎩⎨⎧⎥⎦⎤⎢⎣⎡====-------∞+=-----+∞=---+∞=-∑∑∑211111101111112cos 21cos 1cos cos cos z z kT z kT dz d Tz dz d Tz z kT dz d Tz dz d TzzkT kT dz dTzzkT kT kT x Z z X k k k kk kωωωωω ④ ()ttet x 4-=()()[][][]()21414141104114111-----+∞=----+∞=---=⎪⎭⎫ ⎝⎛-====∑∑z e z Te z e dz d Tz z e dz d Tz zkTekT x Z z X T T T k k kT k kkT7-2求下列函数的Z 变换。
①()kTe kT x α--=1; ②()kT ekT x kTωαcos -=;③()tet t x 52--=; ④()t t t x ωsin =;⑤()()a s s k s G +=; ⑥()()()211++=s s s s G⑦()211s s s e s G Ts +-=-;⑧()()15+=-s s e s G Ts解:① ()kTe kT x α--=1根据z 变换定义有:()()[][]11011111---+∞=--+∞=-+∞=-----=-=-==∑∑∑ze z z e zzekT x Z z X T k k kT k kk kkTααα ② ()kT e kT x kT ωαcos -= 根据欧拉公式有:()()kT j kT kTj kT kTj kT j kTkTe e e e ekT ekT x ωαωαωωααω--+----+=⎪⎪⎭⎫ ⎝⎛+==212cos 然后,再根据z 变换定义得:()()[]()()⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡+==∑∑∑+∞=---+∞=-+-+∞=---+-0002121k k kT j kT k k kT j kT k k kTj kT kT j kT z e z e z e e kT x Z z X ωαωαωαωα()()()21111cos 1cos 1111121-------+-+--=⎥⎦⎤⎢⎣⎡---=ze z e kT z e kT z e z e kT kT kT T j T T j T αααωαωαωω或者()()[][][]()()[]()()()2111cos 1cos 1cos cos ----∞+=-∞+=--+--====∑∑z e z e kT z e ze kT zekT zkT ekT x Z z X kTkTkTkTk kkTk kkTααααααωωωω③ ()t e t t x 52--= 根据z 变换定义有:()()[]()[]()()()15311220502521111-----∞+=--∞+=-∞+=-----+=-=-==∑∑∑z e z z z T z ezkT zekT kT x Z z X T k kkT k kk kkT其中,根据z 变换的性质有()()()⎭⎬⎫⎩⎨⎧⎥⎦⎤⎢⎣⎡==∑∑∑+∞=-----+∞=---+∞=-011110112k k k k k kz kT u dz d Tz dz d Tz z kT dz d Tz zkT ()()()()411121121111111111121111---------------⋅-+-=⎥⎥⎦⎤⎢⎢⎣⎡-=⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛-=z Tz z z T Tz z Tz dz d Tz z dz d Tz dzdTz ()()()()()()()()()311124111141214121211111111112221-----------------+=--+=--=--++-=z z z T z z z T Tz z z T Tzz z z z z T Tz④ ()t t t x ωsin = 根据z 变换的性质有()()[][][]⎥⎦⎤⎢⎣⎡-====∑∑∑+∞=----+∞=---+∞=-0110112sin sin k k kT j kT j k k k kz j e e dz d Tz z kT dz d Tz zkT kT kT x Z z X ωωωω()()⎥⎦⎤⎢⎣⎡⎪⎪⎭⎫ ⎝⎛--+--=⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛---=-------------1111111111111121111121z e z e z e z e j dz d Tz z e ze j dz d TzT j T j T j T j T j T j ωωωωωω()()⎪⎪⎭⎫ ⎝⎛+⋅-⋅=⎥⎦⎤⎢⎣⎡⎪⎪⎭⎫ ⎝⎛++--=------------1cos 2sin 1211211112111z T z z T dz d Tz z e e z z e e j dz d TzT j T j T j T j ωωωωωω ()()[]()21211121121111cos 2cos 221cos 2sin 1cos 2sin +⋅---+⋅-⋅=⎪⎪⎭⎫ ⎝⎛+⋅-⋅=------------z T z T z z z T z T Tz z T z z T dz d Tzωωωωωω()()212111cos 21sin +⋅-⋅-⋅=----z T z z z T T ωω ⑤()()a s s ks G +=;方法是,首先将分式分解为部分分式,然后再利用留数方法确定其待定系数,最后通过查表可得Z 变换式。
习题7-1下面的微分方程代表了线性定常系统,请写出它们对应的状态空间表达(a ))(5)()(4)(22t r t c dtt dc dt t c d =++(b ))()()()(4)(5)(02233t r d c t c dtt dc dt t c d dt t c d t =++++⎰ττ (c )dtt dr t r t c dt t c d dt t c d )(4)()()(2)(2233+=++ 7-2 已知线性定常系统的状态方程为:Ax x =.,其中(1)⎥⎦⎤⎢⎣⎡-=2010A (2) ⎥⎦⎤⎢⎣⎡-=0110A (3)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=010100010A 试求系统统的状态转移矩阵At e答案:(1)⎥⎦⎤⎢⎣⎡-=--tt Ate e e2205.05.01 (2)⎥⎦⎤⎢⎣⎡-=t t t t e Atcos sin sin cos (3)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+--+-+-=------)(5.0)(5.00)(5.0)(5.001)(5.0)(5.01t t t t t t t t t t t t Ate e e e e e e e e e e e e 7-3 已知系统的状态方程为:u x x ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=103210.,初始条件为⎥⎦⎤⎢⎣⎡=10)0(x ,试求单位阶跃收入时系统的时间响应x(t)答案:(1)求状态转移矩阵 先求出预解矩阵⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+++-+++-+-+++-++=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡++++-+++++=⎥⎦⎤⎢⎣⎡+-=---)2(2)1(1)2(2)1(2)2(1)1(1)2(1)1(2)2)(1()2)(1(2)2)(1(1)2)(1()3(321)(11s s s s s s s s s s s s s s s s s s s s A sI对上式进行拉式反变换,即可定出:⎥⎦⎤⎢⎣⎡+-+---=--------t t t t t t t t At2222e 2e e 2e 2e e e e 2e(2)求系统的时间响应()0022()2()()2()22()2()()2()022()e e ()d 002e e e e 2e e e e d 112e 2e e 2e 2e 2e e 2e 0.50.5tAt A t t t t t t t t t t t t t t t t t t t tx t x Bu e e ττττττττττττ---------------------------=+⎡⎤⎡⎤----⎡⎤⎡⎤=+⎢⎥⎢⎥⎢⎥⎢⎥-+-+-+-+⎣⎦⎣⎦⎣⎦⎣⎦⎡⎤-=⎢⎥⎣⎦⎰⎰7-4 已知矩阵:(1)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=t t t t t sin cos 0cos sin 0001)(ϕ (2)⎥⎦⎤⎢⎣⎡--+=-t t t t t t t e e e e e e e t 222222)(ϕ 试问:它们可能是某个系统的状态转移矩阵吗?为什么?答案:I =)0(ϕ时才是状态转移矩阵,所以上述两个矩阵均不是某个系统的状态转移矩阵。