广义正交坐标系
- 格式:ppt
- 大小:203.50 KB
- 文档页数:33
广义球面坐标变换原理在数学和物理学中,广义球面坐标变换原理是一种常用的坐标变换方法,它在描述球面上的物理现象和问题时非常有效。
广义球面坐标变换原理在天体力学、地质学、天文学等领域有着广泛的应用。
本文旨在介绍广义球面坐标变换原理的基本概念和推导方法,以便读者更好地理解和运用这一方法。
1. 坐标系简介广义球面坐标系统是一种在球面上描述空间点的坐标系。
通常使用广义球面坐标系来描述球面上的物理量和现象,例如地球上的地理位置、行星运动轨迹等。
在广义球面坐标系中,我们通常使用三个坐标参数来表示点的位置,常用参数包括纬度、经度、高度等。
2. 坐标变换原理广义球面坐标变换原理是将一个点在一个球面坐标系下的坐标与另一个球面坐标系下的坐标相互转换的方法。
这种坐标变换原理在不同坐标系下描述物体位置时非常有用。
假设球面上有两个坐标系A和B,分别用$(r, \\theta, \\phi)$和$(r', \\theta', \\phi')$表示。
要将点在A坐标系下的坐标$(r, \\theta, \\phi)$转换到B坐标系下的坐标$(r', \\theta', \\phi')$,可以通过一系列坐标变换方程进行计算。
具体来说,广义球面坐标变换原理可以表示为:$$ \\begin{align*} r' &= f_r(r, \\theta, \\phi) \\\\ \\theta' &= f_\\theta(r,\\theta, \\phi) \\\\ \\phi' &= f_\\phi(r, \\theta, \\phi) \\\\ \\end{align*} $$ 其中f r、$f_\\theta$和$f_\\phi$分别是r、$\\theta$、$\\phi$的变换函数。
3. 应用举例下面通过一个简单的例子来说明广义球面坐标变换原理的应用。
一、常用坐标系1、北京坐标系北京54坐标系为参心大地坐标系,大地上的一点可用经度L54、纬度M54和大地高H54定位,它是以克拉索夫斯基椭球为基础,经局部平差后产生的坐标系。
1954年北京坐标系的历史:新中国成立以后,我国大地测量进入了全面发展时期,再全国范围内开展了正规的,全面的大地测量和测图工作,迫切需要建立一个参心大地坐标系。
由于当时的“一边倒”政治趋向,故我国采用了前苏联的克拉索夫斯基椭球参数,并与前苏联1942年坐标系进行联测,通过计算建立了我国大地坐标系,定名为1954年北京坐标系。
因此,1954年北京坐标系可以认为是前苏联1942年坐标系的延伸。
它的原点不在北京而是在前苏联的普尔科沃。
北京54坐标系,属三心坐标系,长轴6378245m,短轴6356863,扁率1/298.3;2、西安80坐标系1978年4月在西安召开全国天文大地网平差会议,确定重新定位,建立我国新的坐标系。
为此有了1980年国家大地坐标系。
1980年国家大地坐标系采用地球椭球基本参数为1975年国际大地测量与地球物理联合会第十六届大会推荐的数据,即IAG75地球椭球体。
该坐标系的大地原点设在我国中部的陕西省泾阳县永乐镇,位于西安市西北方向约60公里,故称1980年西安坐标系,又简称西安大地原点。
基准面采用青岛大港验潮站1952-1979年确定的黄海平均海水面(即1985国家高程基准)。
西安80坐标系,属三心坐标系,长轴6378140m,短轴6356755,扁率1/298.257221013、2000国家大地坐标系的定义国家大地坐标系的定义包括坐标系的原点、三个坐标轴的指向、尺度以及地球椭球的4个基本参数的定义。
2000国家大地坐标系的原点为包括海洋和大气的整个地球的质量中心;2000国家大地坐标系的Z轴由原点指向历元2000.0的地球参考极的方向,该历元的指向由国际时间局给定的历元为1984.0的初始指向推算,定向的时间演化保证相对于地壳不产生残余的全球旋转,X轴由原点指向格林尼治参考子午线与地球赤道面(历元2000.0)的交点,Y轴与Z轴、X轴构成右手正交坐标系。
广义坐标所谓约束体系是指其状态在运动过程中受到了某种限制而不能自由变化的体系。
数学上,这意味着描述体系的状态参量——位置和速度——是满足某种关系的,这种关系就称为是约束方程,一般来说它具有如下的形式()()1212,,,,,,,,,,0n nf r r r r r r t f r r t ==K K K K K K K K "" (1) 这里以及以后,在不引起混淆的情况下,我都将把函数中的一组带有下标的自变量缩记为一个不带下标的量。
譬如刚体就是一个特殊的约束体系,因为其中任何两点的距离在运动过程中都是不变的,即const.ab a b r r r =−=K K 。
上一章最后的那个例子也是一个约束问题,在那里,不仅要求下面那个楔形物体只能在水平方向运动[约束方程],而且还要求两个物体在运动过程中是始终保持接触的[2const.y =()121tan y x x θ=−]。
再比如一个限制在某个曲面上运动的粒子,约束方程就是该曲面的方程,而如果曲面本身又是在空间按给定方式运动——譬如一个粒子在半径以某个给定速度不断增大的球面上的运动——那么约束方程就将显含时间:()()222212312300,,,0f x x x t x x x a v t =++−+= (2) 物体之所以不能自由运动,究其原因是由于对体系施加约束的物体(约束物)提供了一个力,这个力与其他的力的一起作用恰好使得物体只能在约束上运动。
这种由约束物提供的、使得运动物体只能按照给定方式运动的力就称为约束力,而其他的力则都被称为是主动力。
约束力本质上是物体形变后产生的恢复力。
当运动物体挤压、拉伸约束物时,二者都会发生形变,并相互以恢复力作用于对方,这就产生了约束力,如果约束力不够大,则物体的运动将有不遵循约束的趋势,于是就会进一步压迫约束物,约束力也就相应地增大,一直到物体的运动恰好遵循约束为止。
总之,约束力的特点是应运而生的——因运动需要而产生的。
测量中常用的坐标系一、坐标系类型1、大地坐标系定义:大地测量中以参考椭球面(不准确)为基准面建立起来的坐标系。
一定的参考椭球和一定的大地原点上的大地起算数据,确定了一定的坐标系。
通常用参考椭球参数和大地原点上的起算数据作为一个参心大地坐标系建成的标志。
大地坐标(地理坐标):将某点投影到椭球面上的位置用大地经度L和大地纬度B表示,( B , L)统称为大地坐标。
大地高H:某点沿投影方向到基准面(参考椭球面)的距离。
在大地坐标系中,某点的位置用(B , L,H)来表示。
2、空间直角坐标系定义:以椭球体中心为原点,起始子午面与赤道面交线为X 轴,在赤道面上与X轴正交的方向为Y轴,椭球体的旋转轴为Z轴。
在空间直角坐标系中,某点的位置用(X,Y,Z)来表示。
3、平面直角坐标系在小区域进行测量工作若采用大地坐标来表示地面点位置是不方便的,通常采用平面直角坐标系。
测量工作以x轴为纵轴,以y轴为横轴投影坐标:为了建立各种比例尺地形图的控制及工程测量控制,一般应将椭球面上各点的大地坐标按照一定的规律投影到平面上,并以相应的平面直角坐标表示。
4、地方独立坐标系基于限制变形、方便、实用和科学的目的,在许多城市和工程测量中,常常会建立适合本地区的地方独立坐标系,建立地方独立坐标系,实际上就是通过一些参数来确定地方参考椭球与投影面。
二、国家大地坐标系1.1954年北京坐标系(BJ54旧)坐标原点:前苏联的普尔科沃。
参考椭球:克拉索夫斯基椭球。
平差方法:分区分期局部平差。
存在问题:(1)椭球参数有较大误差。
(2)参考椭球面与我国大地水准面存在着自西向东明显的系统性倾斜。
(3)几何大地测量和物理大地测量应用的参考面不统一。
(4)定向不明确。
2.1980年国家大地坐标系(GDZ80)坐标原点:陕西省泾阳县永乐镇。
参考椭球:1975年国际椭球。
平差方法:天文大地网整体平差。
特点:(1)采用1975年国际椭球。
(2)参心大地坐标系是在1954年北京坐标系基础上建立起来的。

一般数学分析或高等数学课本中只给出了正交直角坐标系下曲面面积的积分算法,但是有些时候我们知道的是曲面在球坐标系柱坐标系等广义正交坐标系下的方程,这时需要先把曲面方程转化为正交直角坐标系下的方程然后代入计算,这样不仅多出步骤,而且有些时候面积的积分在球坐标系或柱坐标系下进行会更加简单,为此我们来求一下在广义正交坐标系下曲面面积的微分是怎样的。
()()()()11233312121212u 1111曲面的参数方程通常用向量函数表示为(,):r r (,) (,), r (,)(,)(,)假设曲面在广义正交坐标系u ,u ,u 下的方程为u =u u ,u 则曲面可表示为:r r u ,u u ,u ,在曲面任一点P :r r (u ,u )处,令u 改变du ,相应地r 改变dr r du ,p 点移动到p 点x y z μνμνμνμνμνμν⎡⎤⎢⎥∑=∈∆=⎢⎥⎢⎥⎣⎦∑=∈∆==212121u 222212u u u u 12121212331131u ;令u 改变du ,相应地r 改变dr r du ,p 点移动到p 点;曲面的微分即为向量pp ,pp 所张平行四边形,其面积为ds=pp pp =r du r du =r r du du 在p 点分别以u 坐标轴,u 坐标轴,u 坐标轴的切线方向为正方向建立局部正交直角坐标系,在建立的新的坐标系中u h du ,0,h d u r ==⨯⨯⨯∂∂2121313113223223u 232233u u 23131212u u h ,0,h du u u 0,h du ,h du u u r =0,h ,h du u u u r r =-h h ,-h h ,h h u u ⎛⎫ ⎪⎛⎫∂⎝⎭= ⎪∂⎝⎭⎛⎫∂ ⎪∂⎛⎫∂⎝⎭= ⎪∂⎝⎭⎛⎫∂∂⨯ ⎪∂∂⎝⎭()11212123123=h h 则h du du 其中的h ,h ,h 为广义正交坐标系的标度因子此式即为广义正交坐标系下曲面面积的微分方程。
广义坐标
广义坐标是描述一个多粒子系统的位置的一种方法。
在经典力学和量子力学的
研究中,广义坐标扮演着非常重要的角色。
在这篇文章中,我们将深入探讨广义坐标的概念、应用以及其在物理学中的意义。
1. 广义坐标的引入
传统的直角坐标系只能描述空间中的点的位置,但当涉及到复杂的多粒子系统时,直角坐标系的局限性就显现出来了。
为了解决这一问题,我们引入了广义坐标的概念。
广义坐标可以包括一些其他参数,如角度、弧长等,使得描述系统的位置更加灵活。
2. 广义坐标的应用
广义坐标在物理学中有着广泛的应用。
在拉格朗日力学中,我们可以利用广义
坐标来建立系统的拉格朗日函数,从而推导出系统的运动方程。
广义坐标还在量子力学中扮演着重要的角色,如路径积分中的广义坐标就是描述粒子位置的参数。
3. 广义坐标的意义
广义坐标的引入不仅仅是为了解决多粒子系统的位置描述问题,更重要的是为
我们提供了一种更加方便和通用的描述物理系统的工具。
通过引入适当的广义坐标,我们可以简化问题的求解,使得物理模型更加具有普适性。
综上所述,广义坐标是一种描述多粒子系统位置的重要方法,它在物理学的多
个领域中都有着重要的应用。
通过深入学习和理解广义坐标的概念和原理,我们能更好地理解和研究复杂系统的运动规律。
常用坐标系一、常用坐标系1、北京坐标系北京54坐标系为参心大地坐标系,大地上的一点可用经度L54、纬度M54和大地高H54定位,它是以克拉索夫斯基椭球为基础,经局部平差后产生的坐标系。
1954年北京坐标系的历史:新中国成立以后,我国大地测量进入了全面发展时期,再全国范围内开展了正规的,全面的大地测量和测图工作,迫切需要建立一个参心大地坐标系。
由于当时的“一边倒”政治趋向,故我国采用了前苏联的克拉索夫斯基椭球参数,并与前苏联1942年坐标系进行联测,通过计算建立了我国大地坐标系,定名为1954年北京坐标系。
因此,1954年北京坐标系可以认为是前苏联1942年坐标系的延伸。
它的原点不在北京而是在前苏联的普尔科沃。
北京54坐标系,属三心坐标系,长轴6378245m,短轴6356863,扁率1/298.3;2、西安80坐标系1978年4月在西安召开全国天文大地网平差会议,确定重新定位,建立我国新的坐标系。
为此有了1980年国家大地坐标系。
1980年国家大地坐标系采用地球椭球基本参数为1975年国际大地测量与地球物理联合会第十六届大会推荐的数据,即IAG75地球椭球体。
该坐标系的大地原点设在我国中部的陕西省泾阳县永乐镇,位于西安市西北方向约60公里,故称1980年西安坐标系,又简称西安大地原点。
基准面采用青岛大港验潮站1952-1979年确定的黄海平均海水面(即1985国家高程基准)。
西安80坐标系,属三心坐标系,长轴6378140m,短轴6356755,扁率1/298.257221013、2000国家大地坐标系的定义国家大地坐标系的定义包括坐标系的原点、三个坐标轴的指向、尺度以及地球椭球的4个基本参数的定义。
2000国家大地坐标系的原点为包括海洋和大气的整个地球的质量中心;2000国家大地坐标系的Z轴由原点指向历元2000.0的地球参考极的方向,该历元的指向由国际时间局给定的历元为1984.0的初始指向推算,定向的时间演化保证相对于地壳不产生残余的全球旋转,某轴由原点指向格林尼治参考子午线与地球赤道面(历元2000.0)的交点,Y轴与Z轴、某轴构成右手正交坐标系。
广义正交坐标系
广义正交坐标系(Generalized orthogonal coordinate system)是指一种坐标系,其中坐标轴相互垂直且坐标线之间的夹角保持恒定。
在三维空间中,常见的广义正交坐标系包括直角坐标系、柱坐标系和球坐标系。
1. 直角坐标系:直角坐标系是最常见的广义正交坐标系,也叫笛卡尔坐标系。
它由三个相互垂直的坐标轴组成,分别表示x、y和z方向的坐标。
直角坐标系适用于描述大多数物体的位置和运动。
2. 柱坐标系:柱坐标系使用径向(r)、极角(θ)和高度(z)三个坐标轴来描述一个点的位置。
其中,径向表示点到原点的距离,极角表示点在平面上的旋转角度,高度表示点在z轴上的位置。
柱坐标系常用于圆柱形状或具有旋转对称性的问题。
3. 球坐标系:球坐标系使用球半径(r)、极角(θ)和方位角(φ)三个坐标轴来描述一个点的位置。
其中,球半径表示点到原点的距离,极角表示点与正z轴的夹角,方位角表示点在xy平面上的旋转角度。
球坐标系常用于描述球对称问题或以原点为中心的问题。
广义正交坐标系可以用于描述多种物理现象和数学问题。
不同的坐标系在不同的情况下有不同的优势和适用性。
选择合适的坐标系可以简化问题的表达和求解。
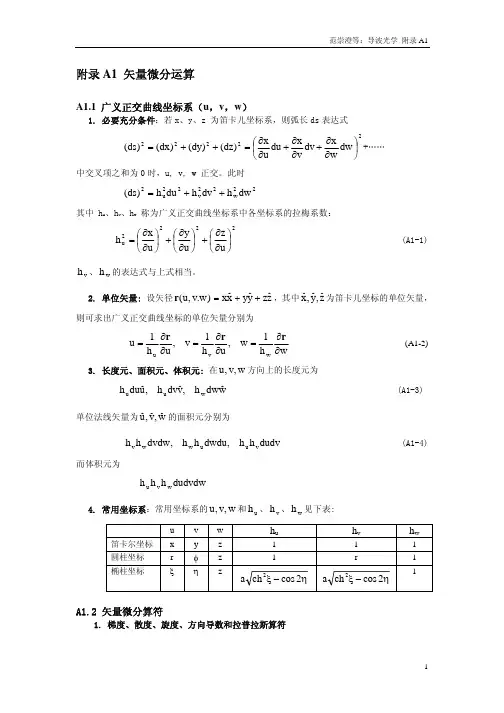
附录A1 矢量微分运算A1.1 广义正交曲线坐标系(u ,v ,w )1. 必要充分条件:若x、y、z 为笛卡儿坐标系,则弧长ds 表达式22222dw w x dv v x du u x )dz ()dy ()dx ()ds (⎟⎠⎞⎜⎝⎛∂∂+∂∂+∂∂=++=+……中交叉项之和为0时,u, v, w 正交。
此时22w 22v 22u 2dw h dv h du h )ds (++=其中 h u 、h v 、h w 称为广义正交曲线坐标系中各坐标系的拉梅系数:2222uu z u y u x h ⎟⎠⎞⎜⎝⎛∂∂+⎟⎠⎞⎜⎝⎛∂∂+⎟⎠⎞⎜⎝⎛∂∂= (A1-1)v h 、w h 的表达式与上式相当。
2. 单位矢量: 设矢径z ˆz y ˆy xˆx )w .v ,u (++=r ,其中z ˆ,y ˆ,x ˆ为笛卡儿坐标的单位矢量,则可求出广义正交曲线坐标的单位矢量分别为wh 1w ,u h 1v ,u h 1u w v u ∂∂=∂∂=∂∂=rr r (A1-2)3. 长度元、面积元、体积元: 在w ,v ,u 方向上的长度元为w ˆdw h ,v ˆdv h ,uˆdu h w u u (A1-3) 单位法线矢量为w ˆ,v ˆ,uˆ的面积元分别为 dudv h h ,dwdu h h ,dvdw h h v u u w w v (A1-4)而体积元为dudvdw h h h w v u4. 常用坐标系:常用坐标系的w ,v ,u 和u h 、v h 、w h 见下表:A1.2 矢量微分算符1. 梯度、散度、旋度、方向导数和拉普拉斯算符Vd limgrad 0V ∆φ=φ∫∫→∆S (A1-6) Vlimdiv 0V ∆•=∫∫→∆A dS A (A1-7) Vlimrot 0V ∆×=∫∫→∆A dS A (A1-8) φ•≡φgrad )grad (S S (A1-9) S)grad (∂∂•≡AS A S (A1-10) 拉普拉斯算符△作用于标量φ=∆•φ=φ∆∫∫→∆grad div Vgrad limSV ds (A1-11)拉普拉斯算符作用于矢量A -A A rot rot div grad =∆ (A1-12)上列各式中(A1-11)及(A1-12)为二次微分运算,其余为一次微分运算。
广义正交坐标系
(最新版)
目录
1.广义正交坐标系的定义
2.广义正交坐标系的性质
3.广义正交坐标系的应用
正文
广义正交坐标系是一种数学工具,用于描述多维空间的点。
这种坐标系与直角坐标系类似,但在某些方面有所扩展。
首先,广义正交坐标系定义了一个度量标准,用于计算空间中点之间的距离。
这个度量标准可以是欧几里得距离,也可以是其他类型的距离,如闵可夫斯基距离等。
其次,广义正交坐标系具有一些重要的性质。
例如,它满足正交性,即任意两个坐标轴之间的夹角都是 90 度。
此外,广义正交坐标系还具有旋转不变性,这意味着对坐标系进行旋转不会改变空间中点的位置。
最后,广义正交坐标系在许多领域都有应用。
例如,在机器学习和数据挖掘中,广义正交坐标系可以用于降维和特征提取。
在物理学中,广义正交坐标系可以用于描述时空的弯曲。
第1页共1页。