一阶系统
- 格式:doc
- 大小:588.08 KB
- 文档页数:4


一阶系统传递函数一阶系统是指系统的阶次为1的系统,其传递函数一般形式为:G(s) = K / (τs + 1)其中,G(s)为系统的传递函数,K为系统的增益,τ为系统的时间常数,s为复变量。
一阶系统是控制系统理论中最简单的系统之一,它具有较为简单的数学模型和动态特性。
在现实生活中,许多物理系统和电气系统都可以近似地看作是一阶系统,如机械阻尼系统、电路RC电路等。
一阶系统的传递函数可以用来描述系统的输入与输出之间的关系。
传递函数的分子部分表示输出对输入的比例关系,分母部分表示系统对输入的响应速度。
增益K表示输出与输入之间的比例关系,时间常数τ则决定了系统的响应速度。
一阶系统的动态特性主要体现在其单位阶跃响应上。
单位阶跃响应是指输入信号为单位阶跃函数时,系统的输出响应。
对于一阶系统,其单位阶跃响应可以通过拉普拉斯逆变换得到。
一阶系统的单位阶跃响应的形式为:y(t) = K * (1 - e^(-t/τ))其中,y(t)为系统的输出,t为时间。
从单位阶跃响应的表达式可以看出,一阶系统的单位阶跃响应具有指数衰减的特性。
随着时间的推移,系统的输出将逐渐趋于稳定值K。
根据一阶系统的传递函数和单位阶跃响应,可以进一步分析系统的稳态误差和动态响应特性。
对于稳态误差,一阶系统的单位阶跃响应在稳定状态下会达到稳态值K。
当输入信号发生变化时,系统的输出将逐渐趋向于新的稳态值。
稳态误差可以通过比较输出与输入的差异来评估系统的准确性。
对于动态响应特性,一阶系统的时间常数τ决定了系统的响应速度。
时间常数越小,系统的响应速度越快;反之,时间常数越大,系统的响应速度越慢。
在实际应用中,需要根据系统的需求来选择合适的时间常数。
除了单位阶跃响应,一阶系统还可以对其他输入信号进行分析和建模。
常见的输入信号包括阶跃信号、脉冲信号、正弦信号等。
通过对不同输入信号的分析,可以得到系统的频率响应和幅频特性,从而更好地了解系统的动态性能。
总结起来,一阶系统是控制系统中最简单的系统之一,其传递函数可以用来描述系统的输入与输出之间的关系。

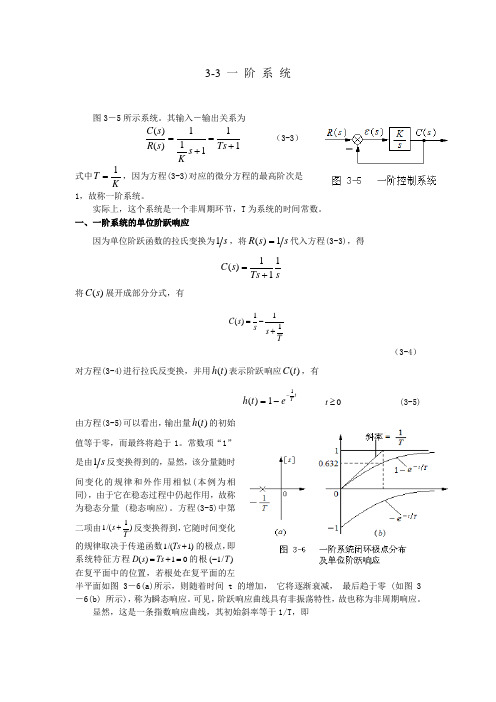
3-3 一 阶 系 统图3-5所示系统。
其输入-输出关系为11111)()(+=+=Ts s Ks R s C (3-3) 式中KT 1=,因为方程(3-3)对应的微分方程的最高阶次是1,故称一阶系统。
实际上,这个系统是一个非周期环节,T 为系统的时间常数。
一、一阶系统的单位阶跃响应因为单位阶跃函数的拉氏变换为s 1,将s s R 1)(=代入方程(3-3),得 sTs s C 111)(+=将)(s C 展开成部分分式,有11()1C s ss T=-+(3-4)对方程(3-4)进行拉氏反变换,并用)(t h 表示阶跃响应)(t C ,有 t Te t h 11)(--= 0t ≥ (3-5)由方程(3-5)可以看出,输出量)(t h 的初始值等于零,而最终将趋于1。
常数项“1”是由s 1反变换得到的,显然,该分量随时间变化的规律和外作用相似(本例为相同),由于它在稳态过程中仍起作用,故称为稳态分量 (稳态响应)。
方程(3-5)中第二项由11/()s T+反变换得到,它随时间变化的规律取决于传递函数1/(1)Ts +的极点,即系统特征方程()10D s Ts =+=的根(1/)T -在复平面中的位置,若根处在复平面的左半平面如图3-6(a)所示,则随着时间 t 的增加, 它将逐渐衰减, 最后趋于零 (如图3-6(b) 所示),称为瞬态响应。
可见,阶跃响应曲线具有非振荡特性,故也称为非周期响应。
显然,这是一条指数响应曲线,其初始斜率等于1/T ,即Te T dt dh t t T t 1|1|010===-= (3-6)这就是说,假如系统始终保持初始响应速度不变,那么当T t =时,输出量就能达到稳态值。
实际上从方程(3-6)可以看出,响应曲线)(t h 的斜率是不断下降的,从0=t 时的T1一直下降到∞=t 时的零值。
因此,当T t =时,指数响应曲线将从零上升到稳态值的63.2%;当T t 2=时,响应曲线将上升到稳态值的86.5%;当T t 3=,T 4和T 5时,响应曲线分别达到稳态值的95%,98.2%和99.3%。

一阶系统的定义
嘿,咱来说说一阶系统是啥定义。
有一次我开车的时候,发现踩下油门后,车子不是马上就加速到很快,而是慢慢地速度才提起来。
这时候我就想到了一阶系统。
一阶系统呢,简单来说就是反应不是特别快,有个逐渐变化的过程。
比如说我那车,油门踩下去,速度得一点点地变,不会一下子就飞出去。
就像你往杯子里倒热水,水温不是一下子就变热了,而是慢慢升高。
这也是一种一阶系统的表现。
在生活中,一阶系统还挺常见的。
比如你开灯,灯也不是瞬间就亮到最亮,而是有个过程。
就像我开车那次经历,让我对一阶系统有了更直观的认识。
嘿嘿。
一阶系统:凡是能够用一阶微分方程描述的系统。
典型环节:比例环节,惯性环节,微分环节,积分环节,震荡环节。
时间相应的组成:按振动性质分为自由响应强迫响应,按振动源分为零输入响应零状态响应。
时间响应:是指控制系统在输入作用下,被控变量(即系统的输入)随时间的变化情况。
传递函数:为当系统初始条件为零时,输出量(响应函数)的拉普拉斯变换与输入量(激励函数)的拉普拉斯变换之比。
频率响应:系统对正弦输入信号的稳定响应称为。
稳定性:是指系统受到扰动作用偏离平衡状态后,当扰动消失,系统经过自身调节能否以一定的准确度恢复到原平衡状态的性能。
2-1什么是线性系统?其最重要特性是什么?答:如果系统的数学模型是线性的,这种系统就叫做线性系统。
线性系统最重要的特性,是适用于叠加原理。
叠加原理说明,两个不同的作用函数(输入),同时作用于系统所产生的响应(输出),等于两个作用函数单独作用的响应之和因此,线性系统对几个输入量同时作用而产生的响应,可以一个一个地处理,然后对它们的响应结果进行叠加。
3-1 时间响应由哪两个部分组成?各部分的定义是什么?答:根据工作状态的不同,把系统的时间响应分为瞬态响应和稳态响应。
系统稳定时,它的自由响应称为瞬态响应,即系统在某一输入信号的作用下其输出量从初始状态到稳定状态的响应过程。
而稳态响应一般就是指强迫响应,即当某一信号输入时,系统在时间趋于无穷大时的输出状态。
2-7证明图(题2-7)所示两系统是相似系统(即证明两系统的传递函数具有相同形式)。
Cou 2R 1R iu1C2ox ix k 1c 1c 2k 2()a (b )解:根据图)(a 的已知内容可得:11R C I I I += ① 011V IR R V i += ② ⎰+=idt C i R V 2201③ ⎰=dti C IR R C 11111④由②有:11R V V i iR -= ③求导:220C i i R V +=②求导:10111V c i V R i R V C i +=+=10)(1C V V i i C -=101)(11C V V R V V i i i i i C R -+-=+=⎪⎪⎭⎫ ⎝⎛-+-+⎪⎪⎭⎫ ⎝⎛-+-=10102101020)(1)(C V V R V V C C V V R V V R V i i i i ∴1)(1)()()(1122212121221121210+++++++==s C R C R C R s R R C C s C R s C R s R R C C s V s V s G i根据图b)可得:⎩⎨⎧=--=-+-1110101002)()()()(x k x x C x x C x x k x x C i i i1)(1)()()()()()(21221122121221122121211112212212112212210+++++++=+++++++==s k C k C k C s k k C C s k C k C s k k C C k k s k C k C k C s C C k k s k C k C s C C s X s X s G i1-1 试举日常生活工程中开环和闭环控制系统的两个例子,说明其工作原理。
答:(1)控制系统的输出量不影响系统的控制作用,即系统中输出端与输入端之间无反馈通道时称开环系统。
如普通的车削加工或没有反馈通道的控制车床进给系统。
其工作原理为:指令(系统输入)(系统输出)工作台控制装置 输入装置伺服装置工作台位置(2)控制系统的输出与输入间存在着反馈通道,即系统的输出对控制作用有直接影响的系统,称为闭环系统。
因此,反馈系统也就是闭环控制系统。
如数控机床进给系统(采用闭环系统时)。
系统的输出(工作台的移动)通过检测装置(同步感应器或光栅等)把信号反馈到输入端,与输入信号一起通过控制装置对工作台的移动进行控制。
其工作原理为:工作台控制装置指令输入装置驱动装置工作台位置检测装置1-2 图(题1-2)是控制导弹发射架方位的电位器式随动系统原理图。
图中电位器P1,P2并联后跨接到同一电源E0的两端,其滑臂分别与输入轴和输出轴相联结,组成方位角的给定元件和测量反馈元件。
输入轴由手轮操纵;输出轴则由直流电动机经减速后带动,电动机采用电枢控制的方式工作。
手轮输入轴输出轴放大器发射架iθoE oθoE 2P 1P eu au ou 1u u +-题 1-2 导弹发射架方位角控制系统原理图试分析系统的工作原理,指出系统的被控对象、被控量和给定量,画出系统的方框图。
解 当导弹发射架的方位角与输入轴方位角一致时,系统处于相对静止状态。
当摇动手轮使电位器P1的滑臂转过一个输入角i θ的瞬间,由于输出轴的转角i o θθ≠,于是出现一个误差角o i e θθθ-=,该误差角通过电位器1P、2P 转换成偏差电压o i e u u u -=,e u经放大后驱动电动机转动,在驱动导弹发射架转动的同时,通过输出轴带动电位器2P 的滑臂转过一定的角度o θ,直至i o θθ=时,o i u u =,偏差电压0=e u ,电动机停止转动。
这时,导弹发射架停留在相应的方位角上。
只要o i θθ≠,偏差就会产生调节作用,控制的结果是消除偏差e θ,使输出量o θ严格地跟随输入量i θ的变化而变化。
系统中,导弹发射架是被控对象,发射架方位角o θ是被控量,通过手轮输入的角度i θ是给定量。
系统方框图如图解1-4所示。
1-3 许多机器,像车床、铣床和磨床,都配有跟随器,用来复现模板的外形。
图(题1-3)就是这样一种跟随系统的原理图。
在此系统中,刀具能在原料上复制模板的外形。
试说明其工作原理,画出系统方框图。
跟随控制器命令输入Z 轴直流伺服马达跟随刀头触针切割刀具原料X 轴直流伺服马达Y 轴直流伺服马达题1-3跟随系统原理图模板解 模板与原料同时固定在工作台上。
X 、Y 轴直流伺服马达接受控制器的指令,按输入命令带动工作台做X 、Y 方向运动。
模板随工作台移动时,触针会在模板表面滑动,跟随刀具中的位移传感器将触针感应到的反映模板表面形状的位移信号送到跟随控制器,控制器的输出驱动Z 轴直流伺服马达带动切削刀具连同刀具架跟随触针运动,当刀具位置与触针位置一致时,两者位置偏差为零,Z 轴伺服马达停止。
系统中,刀具是被控对象,刀具位置是被控量,给定量是由模板确定的触针位置。
系统方框图如图解1-9所示。
最终原料被切割加工成模板的形状。
2-2 分别求出图(题2-2)所示各系统的微分方程。
)()(t f t y km(a ))(t y )(t f 21k k m(b )c c 12m x x io(c )1k 2k oix x c(d )1k 2k x ix oc(e )解:)(a )()()(t f t ky t y m =+)(b )()()()(21t f t y k k t y m =++⋅⋅⋅⋅+=-02010))((x c xm c x x c i212110)()()()(K K s K K c csK s X s X d i ++=02010)())((x K c x xK x x e i i =-+-⋅⋅2-3 求图(题2-3)所示的传递函数,并写出两系统的无阻尼固有频率n ω及阻尼比ξ的表达式。
x ix ockm(a )Cu u oiLR(b )解:图)(a 有:m ks m c s mk s G ++=2)(m k n =ωmk C2=ξ 图)(b 有:⎪⎪⎩⎪⎪⎨⎧=++=⎰⎰idt C V idt C R L V i i i 110∴LC s L R s LC s G 11)(2++=LC n 1=ω L CR 2=ξ2-4 求图(题2-4)所示机械系统的传递函数。
图中M 为输入转矩,mC 为圆周阻尼,J 为转动惯量。
(应注意消去θθ ,及θ )xmkRcMm,C J题2-4解:由已知可知输入量M 与输出量θ之间的关系为:Mk C J m =++θθθ经拉氏变换后为:)()()(2s M k s s C s Js m =++θθθ∴ 222222/11)()()(n n n m m s J k s J C s J k s C Js s M s s G ωξωωθ++=++=++==其中,J k n =ωJk C m 2=ξ 3-2 设温度计能在1分钟内指示出实际温度值的98%,并且假设温度计为一阶系统,求时间常数。
如果将温度计放在澡盆内,澡盆的温度依10℃/min 的速度线性变化,求温度计示值的误差是多大? 解1:依题意可得已知条件为1=t 分,98.0)(=t C 而一阶系统的传递函数为 11)()(+=Ts t R t C 即)(11)(s R Ts s C += 在上述第一问中,要求温度计在1分钟内指示出响应值的98%,这相当于对温度计输入一个单位阶跃。
亦即 )(1)(t t r = 则s s R 1)(=11111)(+-=⋅+=Ts Ts s Ts s C即]11[)]([)(11+-==--Ts Ts L t C L t cTte T s L s L ----=+-=1]11[]1[11将1=t分及98.0)(=t C 代入上式可得Te1198.0--=即 02.098.011=-=-Te将上式两端取自然对数化简后得秒分36.15256.09.3102.0lg 3.21==--=-=T解2:在第二问中已知澡盆温度以分/10线性变化,说明输入函数t At t r 10)(==,为斜坡函数,此时温度计的误差为 )()()()(t c At t c t r t e -=-=而当At t r =)( 时2)(s As R =即]11[11)(11)(222++-=⋅+=+=Ts T s T s A s A Ts s R Ts s C则]11[)()(211211++-==----Ts T L s T L s L A s C L t C)(]1111[1121T tTe T t A T s TL s TL s L A ----+-=++-=即)1()()(T tTte AT TeT t A At t e ---=+--=将已知和已求得之值数1=t 分、256.0=t 分、10=A 代入上式即可求得温度计的误差为)(53.298.0256.010)(上式为近似计算=⨯⨯=t e 。
3-3 已知系统的单位阶跃响应为10tt 02.12.01)(---+=e e t x ,试求:(1)该系统的闭环传递函数;(2)系统的阻尼比ξ和无阻尼固有频率n ω。
解:(1)求解闭环传递函数)(s Φ由已知条件,当输入为单位阶跃信号时]2.12.01[)]([1)()(106000t t e e t x ss s X ---+℘=℘=Φ=1012.16012.01+⨯-+⨯+=s s s则)10)(60()60(2.1)10(2.0)10)(60(102.1602.01)()(0+++-++++=+-++==Φs s s s s s s s s s s s s sX s 6007060060070722.122.06007022222++=++--++++=s s s s s s s s s s(2)求解阻尼比ζ和无阻尼固有频率n ω 将闭环传递函数化为二阶振荡环节的标准形式2222260070600)(n n ns s s s s ωζωω++=++=Φ根据对应关系可得⎪⎩⎪⎨⎧==7026002n n ζωω解得 sra d n /5.24=ω,43.1=ζ。