自动控制原理 二阶系统的响应
- 格式:pdf
- 大小:375.45 KB
- 文档页数:30
自动控制原理实验二阶系统的阶跃响应一、实验目的通过实验观察和分析阶跃响应曲线,了解二阶系统的动态特性,掌握用MATLAB仿真二阶系统阶跃响应曲线的绘制方法,提高对二阶系统动态性能指标的计算与分析能力。
二、实验原理1.二阶系统的传递函数形式为:G(s)=K/[(s+a)(s+b)]其中,K为系统增益,a、b为系统的两个特征根。
特征根的实部决定了系统的稳定性,实部小于零时系统稳定。
2.阶跃响应的拉氏变换表达式为:Y(s)=G(s)/s3.阶跃响应的逆拉氏变换表达式为:y(t)=L^-1{Y(s)}其中,L^-1表示拉氏逆变换。
三、实验内容1.搭建二阶系统,调整增益和特征根,使系统稳定,并记录实际的参数数值。
2.使用MATLAB绘制二阶系统的阶跃响应曲线,并与实际曲线进行对比分析。
四、实验步骤1.搭建二阶系统,调整增益和特征根,使系统稳定。
根据实验要求,选择适当的数字电路元件组合,如电容、电感、电阻等,在实际电路中搭建二阶系统。
2.连接模拟输入信号。
在搭建的二阶系统的输入端接入一个阶跃信号发生器。
3.连接模拟输出信号。
在搭建的二阶系统的输出端接入一个示波器,用于实时观察系统的输出信号。
4.调整增益和特征根。
通过适当调整二阶系统的增益和特征根,使系统达到稳定状态。
记录实际调整参数的数值。
5.使用MATLAB进行仿真绘制。
根据实际搭建的二阶系统参数,利用MATLAB软件进行仿真,绘制出二阶系统的阶跃响应曲线。
6.对比分析实际曲线与仿真曲线。
通过对比分析实际曲线与仿真曲线的差异,分析二阶系统的动态特性。
五、实验结果与分析1.实际曲线的绘制结果。
根据实际参数的输入,记录实际曲线的绘制结果,并描述其特点。
2.仿真曲线的绘制结果。
利用MATLAB软件进行仿真,绘制出仿真曲线,并与实际曲线进行对比分析。
3.实际曲线与仿真曲线的对比分析。
通过对比实际曲线与仿真曲线的差异,分析二阶系统的动态特性,并讨论影响因素。
六、实验讨论与结论1.实验过程中遇到的问题。
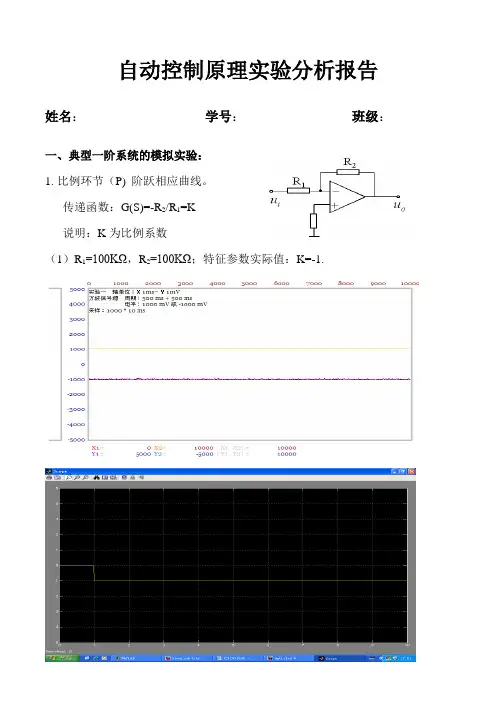
自动控制原理实验分析报告姓名:学号:班级:一、典型一阶系统的模拟实验:1.比例环节(P) 阶跃相应曲线。
传递函数:G(S)=-R2/R1=K说明:K为比例系数(1)R1=100KΩ,R2=100KΩ;特征参数实际值:K=-1.(2)(2)R1=100KΩ,R2=200KΩ;即K=-2.〖分析〗:经软件仿真,比例环节中的输出为常数比例增益K;比例环节的特性参数也为K,表征比例环节的输出量能够无失真、无滞后地按比例复现输入量。
2、惯性环节(T) 阶跃相应曲线及其分析。
传递函数:G(S)=-K/(TS+l) K=R2/R1 , T=R2C说明:特征参数为比例增益K和惯性时间常数T。
(1)、R2=R1=100KΩ , C=1µF;特征参数实际值:K=-1,T=0.1。
(2)、R2=R1=100KΩ , C=0.1µF;特征参数实际值:K=-1,T=0.01。
〖分析〗:惯性环节的阶跃相应是非周期的指数函数,当t=T时,输出量为0.632K,当t=3~4T时,输出量才接近稳态值。
比例增益K表征环节输出的放大能力,惯性时间常数T表征环节惯性的大小,T越大表示惯性越大,延迟的时间越长,反之亦然。
传递函数:G(S)= -l/TS ,T=RC说明:特征参数为积分时间常数T。
(1)、R=100KΩ , C=1µF;特征参数实际值:T=0.1。
(2)R=100KΩ , C=0.1µF;特征参数实际值:T=0.01。
〖分析〗:只要有一个恒定输入量作用于积分环节,其输出量就与时间成正比地无限增加,当t=T时,输出量等于输入信号的幅值大小。
积分时间常数T表征环节积累速率的快慢,T越大表示积分能力越强,反之亦然。
4、比例积分环节(PI) 阶跃相应曲线及其分析。
传递函数:G(S)=K( l+l/TS) K=-R2/R1, T=R2C说明:特征参数为比例增益K和积分时间常数T。
(1)、R2=R1=100KΩ , C=1µF;特征参数实际值:K=-1,T=0.1。
分组:成绩:__ _______北京航空航天大学自动控制原理实验报告实验一一、二阶系统的电子模拟及时域响应的动态测试学院专业方向班级学号学生姓名指导教师2014年11月目录一、实验目的 (1)二、实验内容 (1)三、实验原理 (1)四、实验设备 (2)五、实验步骤 (2)六、实验数据 (3)1.一阶系统实验数据及图形 (3)2.二阶系统实验数据及图形 (4)七、结论和误差分析 (6)结论: (6)误差分析: (7)八、收获与体会 (7)附录 (7)实验时间2014.11.1 同组同学 无一、实验目的1.了解一、二阶系统阶跃响应及其性能指标与系统参数之间的关系。
2.学习在电子模拟机上建立典型环节系统模型的方法。
3.学习阶跃响应的测试方法。
二、实验内容1.建立一阶系统的电子模型,观测并记录在不同时间常数T 时的阶跃响应曲线,并测定其过渡过程时间Ts 。
2.建立二阶系统的电子模型,观测并记录在不同阻尼比ζ时的阶跃响应曲线,并测定其超调量σ%及过渡过程时间Ts 。
三、实验原理1.一阶系统实验原理系统传递函数为:()()()1C S Ks R S TS φ==+模拟运算电路如图1所示:图1212R R Uo(s)K ==Ui(s)CSR +1Ts+1在实验中始终取R2=R1,则K=1,T=R2*C 取不同的时间常数T ,T=0.25s ,T=0.5s ,T=1s记录不同的时间常数下阶跃响应曲线,测量并记录其过渡时间Ts(Ts=3T)2.二阶系统实验原理其传递函数为:222()()()(2)nn nC SSR S S SωζωωΦ==++令1nω=弧度/秒,二阶系统模拟线路下图2所示:图2取R2*C1=1,R3*C2=1,则R4/R3=R4*C2=1/(2*ζ)及ζ=1/(2*R4*C2)理论值:3(0.05)sntζω≈∆=,%σ21100%eπζ--=⨯四、实验设备1. HHMN-1 型电子模拟机一台2. PC 机一台3. 数字式万用表一块。

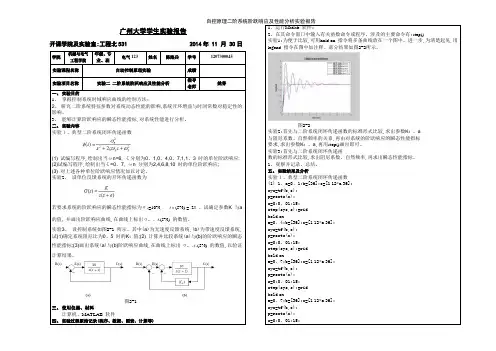
广州大学学生实验报告开课学院及实验室:工程北531 2014年 11 月 30日学院机械与电气工程学院年级、专业、班电气123 姓名陈海兵学号1207300045实验课程名称自动控制原理实验成绩实验项目名称实验二二阶系统阶跃响应及性能分析指导老师姚菁一、实验目的1、掌握控制系统时域响应曲线的绘制方法;2、研究二阶系统特征参数对系统动态性能的影响,系统开环增益与时间常数对稳定性的影响。
3、能够计算阶跃响应的瞬态性能指标,对系统性能进行分析。
二、实验内容实验1、典型二阶系统闭环传递函数(1) 试编写程序,绘制出当ωn=6, ζ分别为0、1,0、4,0、7,1,1、3 时的单位阶跃响应;(2)试编写程序,绘制出当ζ=0、7, ωn 分别为2,4,6,8,10 时的单位阶跃响应;(3) 对上述各种单位阶跃响应情况加以讨论、实验2、设单位反馈系统的开环传递函数为若要求系统的阶跃响应的瞬态性能指标为σp=10%,t s (5%) = 2s、试确定参数K 与a 的值, 并画出阶跃响应曲线,在曲线上标出σp、t s(5%)的数值。
实验3、设控制系统如图2-1所示。
其中(a)为无速度反馈系统,(b)为带速度反馈系统,试(1)确定系统阻尼比为0、5 时的K1值;(2) 计算并比较系统(a)与(b)的阶跃响应的瞬态性能指标;(3)画出系统(a)与(b)阶跃响应曲线,在曲线上标出σp、t s(5%)的数值,以验证计算结果。
图2-1三、使用仪器、材料计算机、MATLAB 软件四、实验过程原始记录(程序、数据、图表、计算等) 1、运行Matlab 软件;2、在其命令窗口中输入有关函数命令或程序。
涉及的主要命令有:step()实验1:为便于比较,可用hold on 指令将多条曲线放在一个图中。
进一步,为清楚起见,用legend 指令在图中加注释。
部分结果如图2-2所示。
图2-2实验2:首先与二阶系统闭环传递函数的标准形式比较,求出参数K1、a与阻尼系数、自然频率的关系,再由对系统的阶跃响应的瞬态性能指标要求,求出参数K1、a,再用step()画出即可。
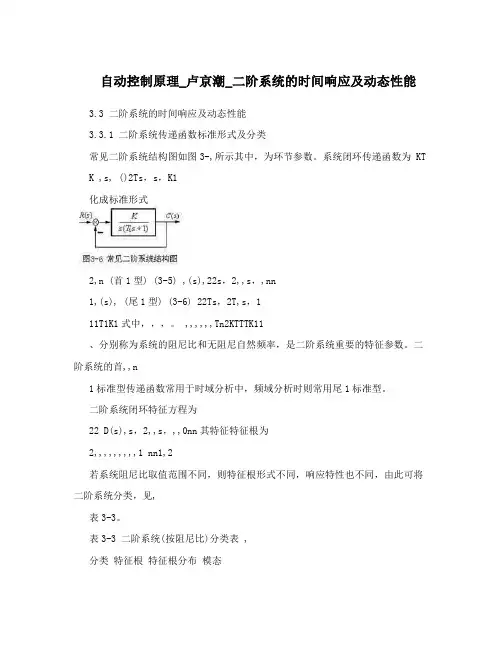
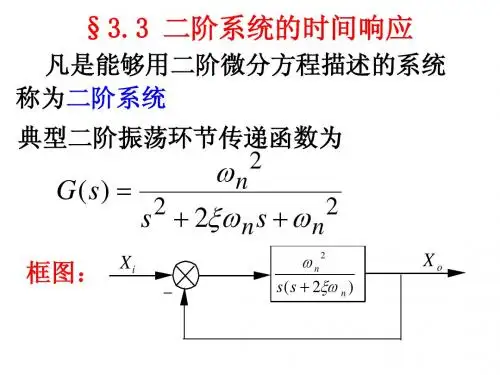
自动控制原理_卢京潮_二阶系统的时间响应及动态性能3.3 二阶系统的时间响应及动态性能3.3.1 二阶系统传递函数标准形式及分类常见二阶系统结构图如图3-,所示其中,为环节参数。
系统闭环传递函数为 KT K ,s, ()2Ts,s,K1化成标准形式2,n (首1型) (3-5) ,(s),22s,2,,s,,nn1,(s), (尾1型) (3-6) 22Ts,2T,s,111T1K1式中,,,。
,,,,,,Tn2KTTTK11、分别称为系统的阻尼比和无阻尼自然频率,是二阶系统重要的特征参数。
二阶系统的首,,n1标准型传递函数常用于时域分析中,频域分析时则常用尾1标准型。
二阶系统闭环特征方程为22 D(s),s,2,,s,,,0nn其特征特征根为2,,,,,,,,,1 nn1,2若系统阻尼比取值范围不同,则特征根形式不同,响应特性也不同,由此可将二阶系统分类,见,表3-3。
表3-3 二阶系统(按阻尼比)分类表 ,分类特征根特征根分布模态,t1e ,,12,,,,,,,,,1 nn 1,2,t2e过阻尼,,tn ,,1e,,,, 1,2n,,tnte临界阻尼,,t,2n,,esin1,t0,,,1 n2,,,,,,j,1,, nn1,2t,,,2necos1,,,t欠阻尼 n57,sint ,,0n ,,,j, 1,2ncos,tn零阻尼数学上,线性微分方程的解由特解和齐次微分方程的通解组成。
通解由微分方程的特征根决定,,t,t,tn12代表自由响应运动。
如果微分方程的特征根是,,且无重根,则把函数,,eee,,,?,?,12n称为该微分方程所描述运动的模态,也叫振型。
,t2,t,如果特征根中有多重根,则模态是具有,形式的函数。
tete,?(,,j,)t(,,j,)t如果特征根中有共轭复根,则其共轭复模态与可写成实函数模态ee,,,,j,,t,t与。
esin,tecos,t每一种模态可以看成是线性系统自由响应最基本的运动形态,线性系统自由响应则是其相应模态的线性组合。
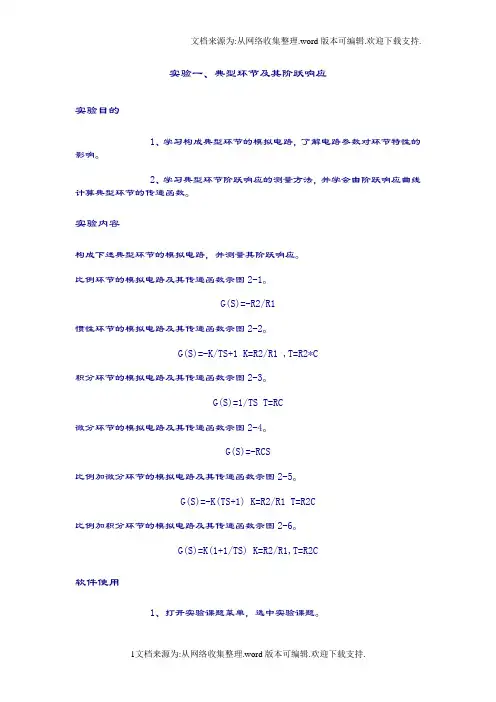
实验一、典型环节及其阶跃响应实验目的1、学习构成典型环节的模拟电路,了解电路参数对环节特性的影响。
2、学习典型环节阶跃响应的测量方法,并学会由阶跃响应曲线计算典型环节的传递函数。
实验内容构成下述典型环节的模拟电路,并测量其阶跃响应。
比例环节的模拟电路及其传递函数示图2-1。
G(S)=-R2/R1惯性环节的模拟电路及其传递函数示图2-2。
G(S)=-K/TS+1 K=R2/R1 ,T=R2*C积分环节的模拟电路及其传递函数示图2-3。
G(S)=1/TS T=RC微分环节的模拟电路及其传递函数示图2-4。
G(S)=-RCS比例加微分环节的模拟电路及其传递函数示图2-5。
G(S)=-K(TS+1) K=R2/R1 T=R2C比例加积分环节的模拟电路及其传递函数示图2-6。
G(S)=K(1+1/TS) K=R2/R1,T=R2C软件使用1、打开实验课题菜单,选中实验课题。
2、在课题参数窗口中,填写相应AD,DA或其它参数。
3、选确认键执行实验操作,选取消键重新设置参数。
实验步骤1、连接被测量典型环节的模拟电路及D/A、A/D连接,检查无误后接通电源。
2、启动应用程序,设置T和N。
参考值:T=0.05秒,N=200。
3、观测计算机屏幕示出的响应曲线及数据记录波形及数据(由实验报告确定)。
实验报告1、画出惯性环节、积分环节、比例加微分环节的模拟电路图,用坐标纸画出所有记录的惯性环节、积分环节、比例加微分环节的响应曲线。
2、由阶跃响应曲线计算出惯性环节、积分环节的传递函数,并与由电路计算的结果相比较。
实验二二阶系统阶跃响应一、实验目的1、研究二阶系统的特征参数,阻尼比ζ和无阻尼自然频ωn 对系统动态性能的影响,定量分析ζ和ωn与最大超调量Mp和调节时间 ts 之间的关系。
2、进一步学习实验仪器的使用方法。
3、学会根据系统阶跃响应曲线确定传递函数。
二、实验原理及电路典型二阶系统的闭环传递函数为其中ζ和ωn对系统的动态品质有决定的影响。

自动控制原理二阶系统动态指标在自动控制原理中,二阶系统的动态特性对整个控制系统的性能至关重要。
以下是对二阶系统动态指标的详细阐述,主要包含稳定性、快速性、准确性、鲁棒性、抗干扰性、调节时间、超调量、阻尼比和频率响应等方面。
一、系统的稳定性稳定性是评估控制系统性能的重要指标。
对于二阶系统,稳定性通常通过观察系统的极点位置来判断。
如果系统的极点位于复平面的左半部分,则系统是稳定的。
此外,系统的稳定性还与阻尼比有关,阻尼比在0到1之间时,系统是稳定的。
二、系统的快速性快速性表示系统响应速度的快慢。
在二阶系统中,快速性通常通过极点的位置来决定。
极点越接近虚轴,系统的响应速度越快。
但需要注意的是,过快的响应速度可能导致系统超调量增大,因此需要综合考虑快速性和稳定性。
三、系统的准确性准确性表示系统输出与期望输出的接近程度。
对于二阶系统,可以通过调整系统的极点和零点位置来提高准确性。
一般来说,增加阻尼比可以提高准确性。
四、系统的鲁棒性鲁棒性表示系统在参数变化或干扰下保持稳定的能力。
对于二阶系统,鲁棒性可以通过调整系统的极点和零点位置来改善。
一般来说,使极点和零点距离越远,系统的鲁棒性越好。
五、系统的抗干扰性抗干扰性表示系统抵抗外部干扰的能力。
对于二阶系统,可以通过增加阻尼比来提高抗干扰性。
阻尼比增大时,系统对外部干扰的抑制能力增强。
六、系统的调节时间调节时间表示系统从受到干扰到恢复稳态所需的时间。
对于二阶系统,调节时间与阻尼比和系统增益有关。
适当增加阻尼比和系统增益可以缩短调节时间。
七、系统的超调量超调量表示系统响应超过稳态值的最大偏差量。
对于二阶系统,超调量与阻尼比有关。
阻尼比越小,超调量越大。
为了减小超调量,可以适当增加阻尼比。
八、系统的阻尼比阻尼比是衡量系统阻尼程度的参数,其值介于0和1之间。
适当的阻尼比可以保证系统具有良好的稳定性和快速性。
对于二阶系统,阻尼比与调节时间和超调量密切相关。
根据实际需求选择合适的阻尼比是关键。
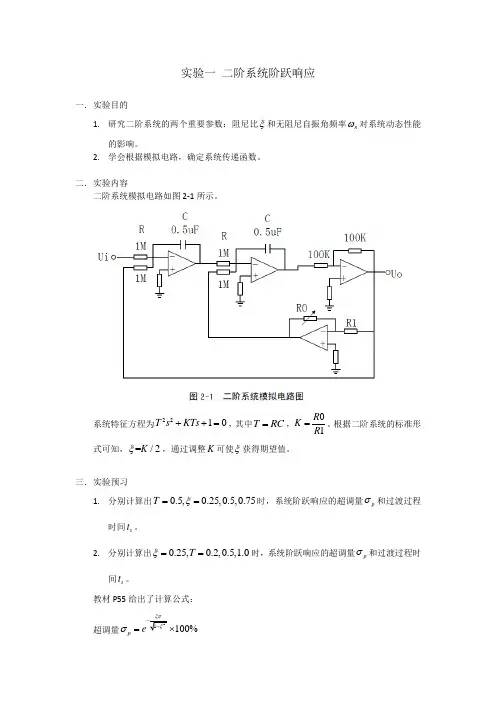
实验一 二阶系统阶跃响应一. 实验目的1. 研究二阶系统的两个重要参数:阻尼比ξ和无阻尼自振角频率n ω对系统动态性能的影响。
2. 学会根据模拟电路,确定系统传递函数。
二. 实验内容二阶系统模拟电路如图2-1所示。
系统特征方程为2210T s KTs ++=,其中T RC =,01R K R =。
根据二阶系统的标准形式可知,=/2K ξ,通过调整K 可使ξ获得期望值。
三. 实验预习1. 分别计算出0.5,0.25,0.5,0.75T ξ==时,系统阶跃响应的超调量p σ和过渡过程时间s t 。
2. 分别计算出0.25,0.2,0.5,1.0T ξ==时,系统阶跃响应的超调量p σ和过渡过程时间s t 。
教材P55给出了计算公式:超调量100%p eσ=⨯过渡过程时间44s nTt ξωξ==(近似值,只适合二阶系统的欠阻尼状态)。
另外,为对实验结果做误差分析,还需计算0.5,1T ξ==时的p σ和s t 。
此时系统为临界阻尼状态,0p σ=,s t 若再用上面给出的式子计算则会使得误差较大。
我们将根据定义采用数值计算的方法计算出s t 。
临界阻尼状态下,二阶系统的单位阶跃响应为()1(1)n tn y t t eωω-=-+,令1()0.98,2n y t Tω===,计算得 2.917()t s =。
根据以上公式计算,将计算结果整理成下表:四. 实验步骤1. 通过改变K ,使ξ获得0,0.25,0.5,0.75,1.0等值,在输入端加同样幅值的阶跃信号,观察过渡过程曲线,记下超调量p σ和过渡过程时间s t ,将实验值和理论值进行比较。
2. 当0.25ξ=时,令0.2,0.5,1.0T =秒秒秒(T RC =,改变两个C ),分别测出超调量p σ和过渡过程时间s t ,比较三条阶跃响应曲线的异同。
五. 数据处理1. 数据整理与计算(1)0.5T =,ξ取不同值其中,记录(0)V 是为了矫正系统误差,因为理论上(0)V 应该等于0。
自动控制原理二阶系统自动控制原理里的二阶系统,嘿,听起来就很复杂,但其实它就像生活中的很多事情,平平淡淡中藏着小秘密。
想象一下,咱们的生活就像一辆汽车,二阶系统就像是车子的加速和刹车。
当你踩下油门,车子就嗖一下冲出去,心里那个美呀,风驰电掣,感觉自己像个飞车党!但别忘了,车子也有刹车,控制得好,才能稳稳当当,不至于飞出老远。
二阶系统就是用来描述这种加速和减速的。
二阶系统最重要的特点是它有两个主要参数,咱们叫它“自然频率”和“阻尼比”。
自然频率就像是你心中的节奏,有些人喜欢快,有些人喜欢慢。
而阻尼比就好比你的刹车系统,刹得稳不稳,能不能让你不那么剧烈地停下来。
如果阻尼比高,车子就能很快地减速,咱们都知道“稳如老狗”的感觉;如果阻尼比低,那简直就像是开着个不太靠谱的碰碰车,可能会东倒西歪,危险得很。
咱们日常生活中,二阶系统随处可见。
比如,想想你家里的洗衣机,开机后,洗衣机的转速就是一个二阶系统。
刚开始的时候,洗衣机的转速慢慢加快,水流像在跳舞,转得越来越快,真是热闹非凡。
然后,快到一定程度,它会开始减速,直到停下来,这个过程就像是人生的起伏,有高兴也有低谷,给你带来各种各样的体验。
在控制理论里,二阶系统的响应有个经典的表现,那就是“超调”。
想象一下,你准备跳舞,兴奋得有点过头了,结果一跳就多跳了一下,这就是超调。
超调在二阶系统中也挺常见的,过了头就意味着你可能会有点晕,这可不好。
设计控制系统时,咱们总是想方设法减少这种超调,毕竟谁都不想在舞台上跳个不停,直到累得不行才停下来。
如果说二阶系统是一部乐队,那每个参数就是乐器。
自然频率是节拍,阻尼比是和声。
如果节拍不稳,乐器就会变得杂乱无章,整个乐队的表演就会出现问题。
可是如果和声太强,音乐听起来就像在喊口号,完全失去了乐趣。
所以,找到那种“恰到好处”的感觉,才是二阶系统的最终追求。
在实际应用中,咱们常常需要调整这些参数。
比如,调节油门和刹车的力度,就能让你的车子在行驶中稳稳当当,而不是忽上忽下。
实验二 二阶系统的阶跃响应一、实验目的1. 通过实验了解参数ζ(阻尼比)、n ω(自然频率)的变化对二阶系统动态性能的影响;2. 掌握二阶系统动态性能的测试方法。
二、实验设备1. THBDC-1型控制理论·计算机控制技术实验平台;2. PC 机一台(含上位机软件)、USB 数据采集卡、37针通信线1根、16芯数据排线、USB 接口线;三、实验内容1. 观测二阶系统的阻尼比分别在0<ζ<1,ζ=1和ζ>1三种情况下的单位阶跃响应曲线;2. ζ为一定时,观测系统在不同n ω时的响应曲线。
四、实验原理1. 二阶系统的瞬态响应用二阶常微分方程描述的系统,称为二阶系统,其标准形式的闭环传递函数为2222)()(n n n S S S R S C ωζωω++= (2-1) 开环传递函数2()(2)n n G s S S ωξω=+ (2-2)闭环特征方程:0222=++nn S ωζω 其解 122,1-±-=ζωζωn n S ,针对不同的ζ值,特征根会出现下列三种情况:1)0<ζ<1(欠阻尼),22,11ζωζω-±-=n n j S此时,系统的单位阶跃响应呈振荡衰减形式,其曲线如图2-1的(a)所示。
它的数学表达式为:()1()n t d C t Sin t ζωωβ-=+ 式中21ζωω-=n d ,ζζβ211-=-tg 。
2)1=ζ(临界阻尼)n S ω-=2,1此时,系统的单位阶跃响应是一条单调上升的指数曲线,如图2-1中的(b)所示。
3)1>ζ(过阻尼),122,1-±-=ζωζωn n S ,此时系统有二个相异实根,它的单位阶跃响应曲线如图2-1的(c)所示。
(a) 欠阻尼(0<ζ<1) (b)临界阻尼(1=ζ) (c)过阻尼(1>ζ)图2-1 二阶系统的动态响应曲线虽然当ζ=1或ζ>1时,系统的阶跃响应无超调产生,但这种响应的动态过程太缓慢,故控制工程上常采用欠阻尼的二阶系统,一般取ζ=0.6~0.7,此时系统的动态响应过程不仅快速,而且超调量也小。