理论力学13虚位移原理
- 格式:ppt
- 大小:979.00 KB
- 文档页数:1
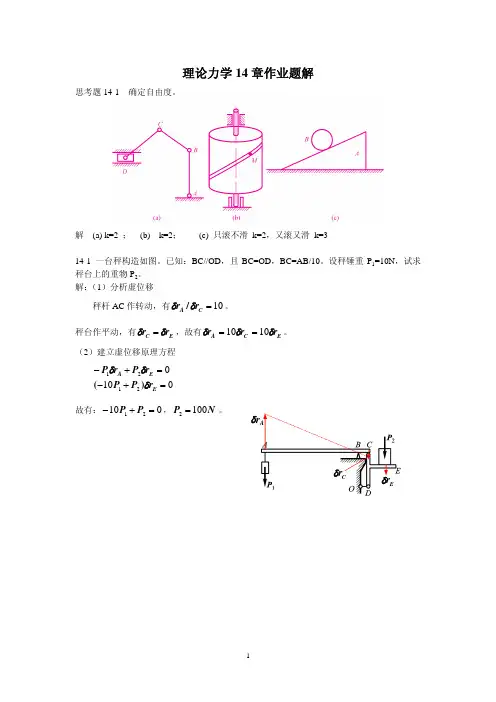
理论力学14章作业题解思考题14-1 确定自由度。
解 (a) k=2 ; (b) k=2; (c) 只滚不滑 k=2,又滚又滑 k=314-1 一台秤构造如图。
已知:BC//OD ,且BC=OD ,BC=AB/10。
设秤锤重P 1=10N ,试求秤台上的重物P 2。
解:(1)分析虚位移 秤杆AC 作转动,有10=C A r r d d /。
秤台作平动,有E C r r d d =,故有E C A r r r d d d 1010==。
(2)建立虚位移原理方程1002121=+-=+-E E A r P P r P r P d d d )(故有:01021=+-P P ,N P 1002=。
Cr d Er14-5 OA=l ,OC=R满足的条件。
解: (用虚位移原理求解)(1) 运动分析(虚位移关系分析)A 处虚位移关系用合成运动的理论分析。
A 为动点,OC 为动系。
r e A r r r r r r d d d +=f d d cos A e r r =另外:R r l r C e /d d = (2) 虚功方程fd f f d d d d cos /)cos /(cos /R l F F r R l F F R r l F r F r F r F C C C A C 21212121000==-=-=-14-9 已知:AC=BC=EC=GC=DE=DG=l ,荷载F 2。
求平衡时的F 1。
解 用解析法,1个自由度,选q 为广义坐标。
建立坐标,如图。
(1) 计算虚位移qdqd q qdq d q sin ,cos cos ,sin l y l y l x l x A A D D 2233-====(2) 计算力的投影 2211F F F F x y -=-= , (3) 建立虚位移原理方程qqdq q q d d sin cos )cos sin (230320212121F F l F l F x F y F D x A y ==×-×=+Oxy14-12 F=4kN, AO=OE=5m. 求D 解:(1) 接触D 处水平约束,代之约束力。
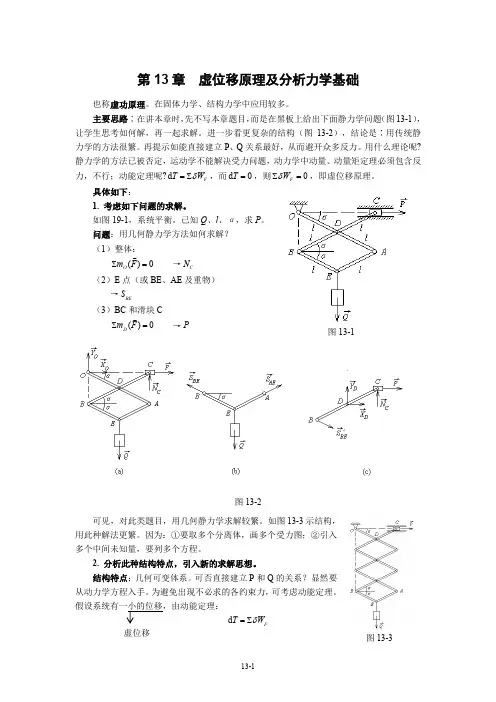
第13章 虚位移原理及分析力学基础也称虚功原理。
在固体力学、结构力学中应用较多。
主要思路∶在讲本章时,先不写本章题目,而是在黑板上给出下面静力学问题(图13-1),让学生思考如何解,再一起求解。
进一步看更复杂的结构(图13-2),结论是∶用传统静力学的方法很繁。
再提示如能直接建立P 、Q 关系最好,从而避开众多反力。
用什么理论呢?静力学的方法已被否定,运动学不能解决受力问题,动力学中动量、动量矩定理必须包含反力,不行;动能定理呢?d F T W δ=∑,而d 0T =,则0F W δ∑=,即虚位移原理。
具体如下:1. 考虑如下问题的求解。
如图19-1,系统平衡。
已知Q 、l 、α,求P 。
问题:用几何静力学方法如何求解? (1)整体:()0O m F ∑=→C N (2)E 点(或BE 、AE 及重物)→BE S(3)BC 和滑块C()0D m F ∑=→P图13-2可见,对此类题目,用几何静力学求解较繁。
如图13-3示结构,用此种解法更繁。
因为:①要取多个分离体,画多个受力图;②引入多个中间未知量,要列多个方程。
2. 分析此种结构特点,引入新的求解思想。
结构特点:几何可变体系。
可否直接建立P 和Q 的关系?显然要从动力学方程入手。
为避免出现不必求的各约束力,可考虑动能定理。
假设系统有一小的位移,由动能定理:d F T W δ=∑图13-1图13-3虚位移由于系统平衡,动能无变化,d 0T =,则0F W δ∑= → 虚功方程此方程中只包含P 和Q ,故建立了简单的方程,可求P 。
此便是虚位移原理的思想。
严格建立虚位移原理,需有诸多基本概念。
13.1 约束 约束的运动学分类静力学中讲的约束——约束的力的性质(约束的力的方面),用约束力表示,常指物体; 此处讲的约束——约束的运动的性质(约束的运动的方面),用约束方程表示,指限制条件。
一、 约束和约束方程自由质点系:运动不受任何限制。
非自由质点系:运动受到限制——约束。
虚位移原理的定义
在物体的运动中,位移可以由许多因素引起,如外力、惯性、重力等。
虚位移原理的主要思想是将这些因素分离开,然后通过分析每个因素对位
移的贡献,来求解物体的运动方程。
1.确定系统的运动状态:首先,要明确系统的物体以及外部力的情况。
这些可以通过建立物体的坐标系和分析作用力得到。
2.定义虚位移:在给定的运动状态下,假设系统从位置A变化到位置B。
定义系统的虚位移为一个无限小的变化,并使其满足运动约束条件。
这个虚位移可以用一个一般的位移矢量δr来表示。
3.计算虚功:通过分析作用在系统上的外部力,计算出每个力对系统
虚位移的贡献。
这个贡献即代表了力对系统产生的虚功。
4.计算虚力:将虚功除以虚位移,得到一个常数,即为虚力。
这个虚
力与系统的其他因素(如惯性、重力)无关,只与外部力有关。
此外,虚位移原理还可以用于解决静力学、动力学和弹性力学等领域
的问题。
在静力学中,可以通过虚位移原理推导出平衡条件;在动力学中,可以用来分析系统的运动方程;在弹性力学中,可以通过虚位移原理推导
出材料的应力应变关系。
总之,虚位移原理是理论力学中一个十分重要的原理,它具有普遍性
和广泛应用性。
通过应用虚位移原理,我们可以更加简洁和有效地描述和
解决各种力学问题。

如何理解理论力学中的虚位移原理?在理论力学的广阔领域中,虚位移原理是一个极其重要的概念,它为解决力学问题提供了一种独特而有效的方法。
然而,对于许多初学者来说,理解虚位移原理可能会感到有些困惑。
那么,让我们一起来揭开它神秘的面纱,深入探讨如何理解这一重要原理。
首先,我们来明确一下什么是虚位移。
虚位移并不是实际发生的位移,而是在某一瞬时,质点或质点系在约束许可的条件下,设想的无限小位移。
它是一种假想的、符合约束条件的位移。
为了更好地理解,我们可以想象一个被绳子悬挂着的小球。
在某一时刻,如果我们假设小球可以在不破坏绳子约束的情况下有一个微小的位移,这个微小的位移就是虚位移。
那么,虚位移原理到底说了什么呢?简单来说,虚位移原理指出:对于一个受理想约束的质点系,其平衡的充分必要条件是,作用于质点系的所有主动力在任何虚位移上所做的虚功之和等于零。
这听起来可能有点抽象,让我们通过一个具体的例子来解释。
假设我们有一个由两个质点通过一根轻质刚性杆连接的系统,放在光滑的水平面上。
质点 A 受到一个水平向右的力 F₁,质点 B 受到一个水平向左的力 F₂。
如果这个系统处于平衡状态,根据虚位移原理,我们可以假设质点 A 有一个向右的虚位移δr₁,质点 B 有一个向左的虚位移δr₂。
由于杆是刚性的,所以两个质点的虚位移之间存在一定的关系。
那么,主动力 F₁和 F₂在相应的虚位移上所做的虚功之和F₁·δr₁ F₂·δr₂就等于零。
虚位移原理的重要性在于它为解决静力学问题提供了一种统一的方法,避免了分别对每个物体进行受力分析和列平衡方程的繁琐过程。
通过虚位移原理,我们可以直接从系统的整体出发,找到力与虚位移之间的关系,从而快速确定系统是否平衡以及未知力的大小。
理解虚位移原理还需要注意一些关键的要点。
首先是理想约束的概念。
理想约束是指约束力在虚位移上所做的虚功之和为零的约束。
常见的理想约束包括光滑接触面、光滑铰链、不可伸长的绳索等。
第13章 虚位移原理及分析力学基础也称虚功原理。
在固体力学、结构力学中应用较多。
主要思路∶在讲本章时,先不写本章题目,而是在黑板上给出下面静力学问题(图13-1),让学生思考如何解,再一起求解。
进一步看更复杂的结构(图13-2),结论是∶用传统静力学的方法很繁。
再提示如能直接建立P 、Q 关系最好,从而避开众多反力。
用什么理论呢?静力学的方法已被否定,运动学不能解决受力问题,动力学中动量、动量矩定理必须包含反力,不行;动能定理呢?d F T W δ=∑,而d 0T =,则0F W δ∑=,即虚位移原理。
具体如下:1. 考虑如下问题的求解。
如图19-1,系统平衡。
已知Q 、l 、α,求P 。
问题:用几何静力学方法如何求解? (1)整体:()0O m F ∑=→C N (2)E 点(或BE 、AE 及重物)→BE S(3)BC 和滑块C()0D m F ∑=→P图13-2可见,对此类题目,用几何静力学求解较繁。
如图13-3示结构,用此种解法更繁。
因为:①要取多个分离体,画多个受力图;②引入多个中间未知量,要列多个方程。
2. 分析此种结构特点,引入新的求解思想。
结构特点:几何可变体系。
可否直接建立P 和Q 的关系?显然要从动力学方程入手。
为避免出现不必求的各约束力,可考虑动能定理。
假设系统有一小的位移,由动能定理:d F T W δ=∑图13-1图13-3虚位移由于系统平衡,动能无变化,d 0T =,则0F W δ∑= → 虚功方程此方程中只包含P 和Q ,故建立了简单的方程,可求P 。
此便是虚位移原理的思想。
严格建立虚位移原理,需有诸多基本概念。
13.1 约束 约束的运动学分类静力学中讲的约束——约束的力的性质(约束的力的方面),用约束力表示,常指物体; 此处讲的约束——约束的运动的性质(约束的运动的方面),用约束方程表示,指限制条件。
一、 约束和约束方程自由质点系:运动不受任何限制。
非自由质点系:运动受到限制——约束。
虚位移原理虚位移原理提供了静力学问题的一种全新的解法,它还是分析力学的基础。
虚位移原理是设计用来消除平衡方程中的约束力,主要是用来求解平衡系统的主动力之间的关系或平衡位置。
另外,通过解除约束,将内力或约束力转化为主动力,则虚位移原理也可用来求解内力和约束力,而且这比以前的列平衡方程的常规方法更有效。
一、力的功元功:力在微小位移上所做的功称为元功。
其数学表达式为:t d W v F ∙=δ或r F d W ∙=δ,其中v 和r d 分别为力F 作用点的速度和微小位移。
变力在曲线路径上做的功可以用曲线积分计算。
等效力系做功定理: 等效力系在刚体的位移上所做的功相等。
即:若},,{},,{11m P P F F n =,则∑∑===mj jn i i P W F W 11)()(。
在计算力的功时,为计算方便,可以利用上述定理。
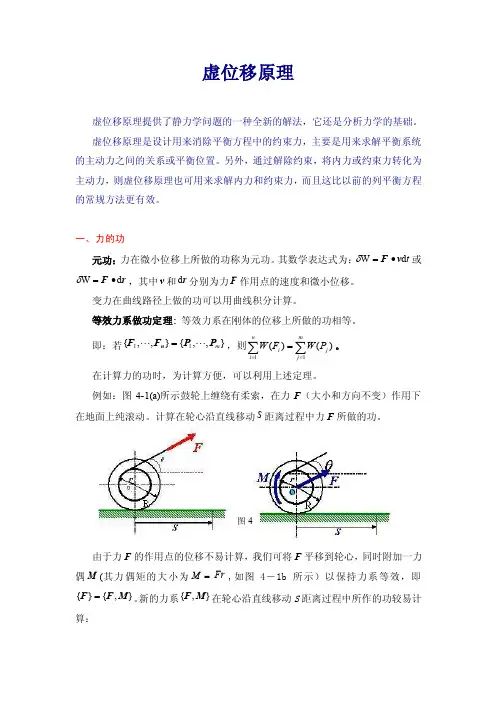
例如:图4-1(a)所示鼓轮上缠绕有柔索,在力F (大小和方向不变)作用下在地面上纯滚动。
计算在轮心沿直线移动S 距离过程中力F 所做的功。
(a) (b) 图4-1由于力F 的作用点的位移不易计算,我们可将F 平移到轮心,同时附加一力偶M (其力偶矩的大小为=M Fr ,如图4-1b 所示)以保持力系等效,即},{}{M F F =。
新的力系},{M F 在轮心沿直线移动S 距离过程中所作的功较易计算:ϕθM FS W +=cos ,其中:ϕ为圆盘轮心移动S 距离时,圆盘转动的角度,即RS =ϕ,于是上式可写成cos SW FS Fr R θ=+⋅ 它等于在轮心沿直线位移S 距离过程中力F 所做的功。
返回主目录二、约束及其分类约束:对质点或质点系运动所加的限制。
如某质点被限制在固定曲面上运动,则该质点就是受到了约束。
约束体对被约束体的运动是通过力的作用(称为约束力)来加以限制的,但是约束与受力是应区别对待的两个不同概念,这可以通过下面的例子来区分.(a)(b) (c)图4-2对图4-2中所示的系统:在(a)中,质点A 被固定在刚性杆上并球铰链连接接在固定点o 。