理论力学-虚位移原理 案例
- 格式:ppt
- 大小:484.00 KB
- 文档页数:13
虚位移原理例题虚位移原理是力学中的一个重要概念,它是描述物体在受力作用下发生位移的原理。
虚位移原理在力学、静力学、动力学等领域都有着广泛的应用。
下面我们通过一些例题来深入理解虚位移原理的应用。
例题一,弹簧振子。
一根质量为m的弹簧上挂着一个质量为M的物体,当物体受到外力F时,弹簧发生形变。
求弹簧的位移x。
解析,根据虚位移原理,我们可以假设弹簧的位移为x,那么弹簧所受的弹力为-kx,其中k为弹簧的弹簧系数。
根据牛顿第二定律,物体所受的合外力为F-kx,根据虚位移原理,这个合外力所做的虚功等于零。
因此,我们可以得到F-kx=0,解得x=F/k。
例题二,斜面上的物体。
一个质量为m的物体沿着无摩擦的斜面向下滑动,斜面的倾角为θ,斜面的高度为h。
求物体滑动的位移s。
解析,根据虚位移原理,我们可以假设物体沿着斜面滑动的位移为s,那么物体所受的重力分解成沿斜面方向的分力为mgsinθ,垂直斜面方向的分力为mgcos θ。
根据虚位移原理,物体所受的合外力为mgsinθ,这个合外力所做的虚功等于零。
因此,我们可以得到mgsinθs=0,解得s=0。
例题三,简谐振动。
一个质量为m的物体挂在一个弹簧上,弹簧的劲度系数为k。
求物体振动的最大位移A。
解析,根据虚位移原理,我们可以假设物体振动的位移为x,那么物体所受的弹力为-kx。
根据牛顿第二定律,物体所受的合外力为-mg-kx,根据虚位移原理,这个合外力所做的虚功等于零。
因此,我们可以得到-mg-kA=0,解得A=mg/k。
通过以上例题的分析,我们可以看到虚位移原理在力学问题中的重要作用。
它通过假设物体的虚位移,使得问题的分析变得简单而直观。
虚位移原理的应用不仅仅局限于上面的例题,它在静力学、动力学、弹性力学等领域都有着广泛的应用。
因此,掌握虚位移原理对于理解力学问题、解决实际问题具有重要意义。
总结:虚位移原理是力学中的一个重要概念,它描述了物体在受力作用下发生位移的原理。
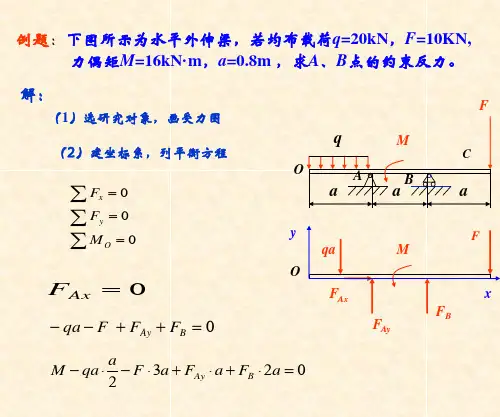
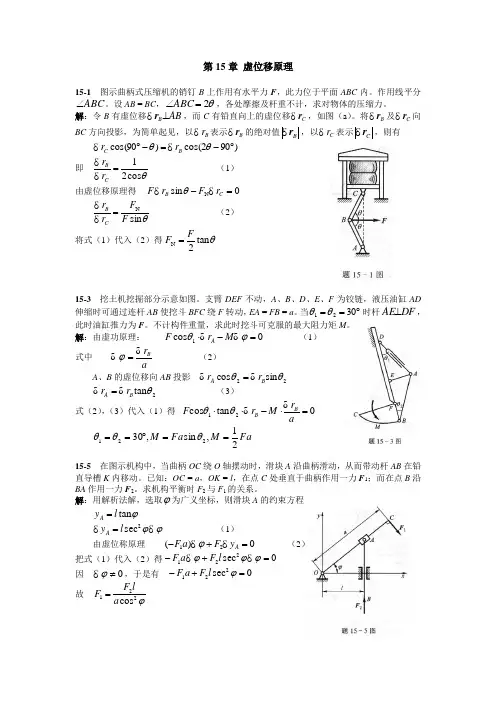
第15章 虚位移原理15-1 图示曲柄式压缩机的销钉B 上作用有水平力F ,此力位于平面ABC 内。
作用线平分ABC ∠。
设AB = BC ,θ2=∠ABC ,各处摩擦及杆重不计,求对物体的压缩力。
解:令B 有虚位移AB B ⊥r δ,而C 有铅直向上的虚位移C r δ,如图(a )。
将B r δ及C r δ向BC 方向投影,为简单起见,以B r δ表示B r δ的绝对值B r δ,以C r δ表示C r δ,则有)902cos(δ)90cos(δ︒-=-︒θθB C r r即 θcos 21δδ=C B r r (1) 由虚位移原理得 0δsin δN =-C B r F r F θ θsin δδN F F r r C B = (2) 将式(1)代入(2)得 θtan 2N F F =15-3 挖土机挖掘部分示意如图。
支臂DEF 不动,A 、B 、D 、E 、F 为铰链,液压油缸AD 伸缩时可通过连杆AB 使挖斗BFC 绕F 转动,EA = FB = a 。
当︒==3021θθ时杆DF AE ⊥,此时油缸推力为F 。
不计构件重量,求此时挖斗可克服的最大阻力矩M 。
解:由虚功原理: 0δδcos 1=-⋅ϕθM r F A (1)式中 a r B δδ=ϕ (2)A 、B 的虚位移向AB 投影 22sin δcos δθθB A r r =2tan δδθB A r r = (3)式(2),(3)代入(1)得 0δδtan cos 21=⋅-⋅⋅a r M r F B B θθ Fa M Fa M 21,sin ,30221==︒==θθθ15-5 在图示机构中,当曲柄OC 绕O 轴摆动时,滑块A 沿曲柄滑动,从而带动杆AB 在铅直导槽K 内移动。
已知:OC = a ,OK = l ,在点C 处垂直于曲柄作用一力F 1;而在点B 沿BA 作用一力F 2。
求机构平衡时F 2与F 1的关系。
解:用解析法解,选取ϕ为广义坐标,则滑块A 的约束方程ϕtan l y A =ϕϕδsecδ2l y A = (1) 由虚位称原理 0δδ)(21=+-A y F a F ϕ (2)把式(1)代入(2)得 0δsec δ221=+-ϕϕϕl F a F因 0δ≠ϕ,于是有 0sec 221=+-ϕl F a F故 ϕ221cos a l F F =15-7 图示滑套D 套在光滑直杆AB 上,并带动杆CD 在铅直滑道上滑动,已知︒=0θ时弹簧为原长,弹簧刚性系数为5 kN/m 。
第12章 虚位移原理及其应用12-1 图示结构由8根无重杆铰接成三个相同的菱形。
试求平衡时,主动力F 1与F 2的大小关系。
解:应用解析法,如图(a ),设OD = lθsin 2l y A =;θsin 6l y B =θθδcos 2δl y A =;θθδcos 6δl y B =应用虚位移原理:0δδ12=⋅-⋅A B y F y F02612=-F F;213F F =12-2图示的平面机构中,D 点作用一水平力F 1,求保持机构平衡时主动力F 2之值。
已知:AC = BC= EC = DE = FC = DF = l 。
解:应用解析法,如图所示:θcos l y A =;θsin 3l x D = θθδsin δl y A -=;θθδcos 3δl x D =应用虚位移原理:0δδ12=⋅-⋅-D A x F y F0cos3sin 12=-θθF F ;θcot 312F F =12-3 图示楔形机构处于平衡状态,尖劈角为θ和β,不计楔块自重与摩擦。
求竖向力F 1与F 2的大小关系。
解:如图(a ),应用虚位移原理:0δδ2211=⋅+⋅r F r F 如图(b ):βθtan δδtan δ2a 1r r r ==;12δtan tan δr r θβ=0δtan tan δ1211=⋅-⋅r θβF r F ;θβtan tan 21⋅=F F12-4 图示摇杆机构位于水平面上,已知OO 1 = OA 。
机构上受到力偶矩M 1和M 2的作用。
机构在可能的任意角度θ下处于平衡时,求M 1和M 2之间的关系。
习题12-1图(a )习题12-2解图习题12-3(a )r a(b )解:应用虚位移原理:0δδ2211=⋅-⋅ϕϕM M (1)如图所示,e a δcos δr r =θ其中:`1a δδϕ⋅=OA r ;2e δcos 2δϕθ⋅⋅=OA r 所以:21δ2δϕϕ=,代入式(1)得:122M M =12-5 等长的AB 、BC 、CD 三直杆在B 、C 铰接并用铰支座A 、D 固定,如图所示。
第14章作业
1、已知:在压缩机的手轮上作用一力偶,其矩为 M 。
手轮轴两端各有螺距同为
h 、但方向相反的螺纹。
螺纹上各套有一个螺母 A 和 B ,这两个螺母分别与长为 a 的杆相铰接,四杆形成菱形框,如图所示。
此菱形框的点 D 固定不动,而点 C 连接在压缩机的水平压板上。
试求:当菱形框的顶角等于 2 θ 时,压缩机对被压物体的压力。
2、已知:挖土机挖掘部分示意如图。
EA = FB = r 。
当时杆 AE ⊥ DF ,此时油缸推力为F,不计构件重量。
试求:此时挖斗可克服的最大阻力矩 M 。
3、已知: 图示远距离操纵用的夹钳为对称结构。
当操纵杆 EF 向右移动时,两块夹板就会合拢将物体夹住。
操纵杆的拉力为F,在图示位置两夹板正好相互平行。
试求:被夹物体所受的压力。
4、已知:跨度为 l 的折迭桥由液压油缸 AB 控制铺设,两段相同的桥身重量都是 ,质心 G 位于其中点。
试求:平衡时液压油缸中的力F和角 θ之间的关系。
5、已知: 图示桁架中, AD = DB = 6m , CD = 3m ,节点 D 处载荷为 。
试求:用虚位移原理求杆 3的内力。