第十七章 拉格朗日方程
- 格式:ppt
- 大小:692.50 KB
- 文档页数:29
动力学中的拉格朗日方程在物理学和工程学中,拉格朗日方程是描述系统动力学的重要工具。
拉格朗日方程由法国数学家和物理学家约瑟夫·拉格朗日于18世纪提出,它能够将系统的动力学问题转化为一组方程,进而方便地求解系统的运动规律。
本文将介绍拉格朗日方程在动力学中的应用,以及其原理和推导方法。
一、拉格朗日方程的原理拉格朗日方程是从一种被称为“拉格朗日力学”的理论体系中得出的。
在拉格朗日力学中,系统的运动被描述为一种能量的变化过程。
拉格朗日方程的原理是基于系统的动能和势能的概念。
系统的动能可以用质点的质量和速度来表示,而势能则是系统中各个物体相对于某一参考点的位置所具有的能量。
根据能量守恒定律,系统的总能量在运动过程中保持不变。
拉格朗日方程的基本思想是,系统的动能和势能之间存在一种函数关系,称为拉格朗日函数。
通过对拉格朗日函数求取变量的极值,可以得到系统的运动方程。
这就是拉格朗日方程的原理。
二、拉格朗日方程的推导方法要推导拉格朗日方程,需要首先确定系统的拉格朗日函数。
拉格朗日函数可表示为系统的动能与势能之间的差异。
以单个质点为例,其拉格朗日函数可表示为L = T - V,其中T为动能,V为势能。
对于多个质点构成的系统,拉格朗日函数的表达式包含了各个质点的动能和相互作用势能。
然后,通过对拉格朗日函数对各个质点的运动变量求取变分,可以得到相应的运动方程,即拉格朗日方程。
三、拉格朗日方程的应用拉格朗日方程在经典力学和动力学中有广泛的应用。
它可以用于描述各种复杂力学系统的运动,如振动系统、弹性体、刚体等。
通过求解拉格朗日方程,可以精确地得到系统的运动规律,并且相较于牛顿力学的方法,具有更加简洁明了的形式。
在求解拉格朗日方程时,一种常见的方法是利用拉格朗日方程的守恒量。
当系统具有某些对称性时,拉格朗日方程会出现某些守恒量,如动量、角动量等。
这些守恒量能够更加简化运动方程的求解过程,并提供对系统运动性质的重要信息。

拉格朗日运动方程拉格朗日运动方程(Lagrange’s equations of motion)是经典力学中的一种重要工具,用于描述质点或者刚体在给定势能函数下的运动。
它由意大利数学家和物理学家约瑟夫·路易·拉格朗日(Joseph-Louis Lagrange)于18世纪提出,被广泛应用于各个领域的物理问题求解中。
1. 背景知识在介绍拉格朗日运动方程之前,我们需要先了解一些基础概念。
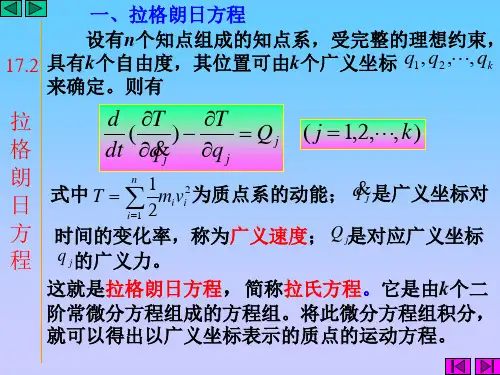
1.1 广义坐标和广义速度对于一个具有n个自由度的力学系统,我们可以引入n个广义坐标q1,q2,...,q n来描述系统的状态。
这些广义坐标可以是位置坐标、角度等。
同时,对于每个广义坐标q i,我们可以定义相应的广义速度q i。
1.2 势能函数和拉格朗日函数对于一个力学系统,在给定外力和内力作用下,我们可以定义一个势能函数V(q)来描述系统的势能。
势能函数通常与广义坐标有关。
而拉格朗日函数L(q, , t)则定义为系统的动能T(q, )减去势能函数V(q):L(q, , t) = T(q, ) - V(q)其中,T(q, )表示系统的动能,与广义坐标和广义速度有关。
1.3 原理和目标拉格朗日运动方程的目标是通过对拉格朗日函数进行变分,得到描述系统运动规律的微分方程。
这些微分方程被称为拉格朗日运动方程。
2. 拉格朗日运动方程的推导为了推导拉格朗日运动方程,我们首先需要引入一个重要概念——虚位移。
2.1 虚位移虚位移是指系统在某一时刻由于广义坐标的微小变化而发生的微小位移。
我们用δq i来表示第i个广义坐标的虚位移。
2.2 虚功原理根据虚功原理(D’Alembert’s principle),对于一个力学系统,在平衡状态下,任意时刻系统所受外力对于任意虚位移所做的功之和等于零。
用数学表达式表示为:∑F ini=1⋅δq i=0其中,F i表示第i个广义坐标对应的力。
2.3 拉格朗日方程的推导根据虚功原理,我们可以将每个力分解为广义坐标和广义速度的函数:F i=Q i(q1,q2,...,q n,q1,q2,...,q n,t)其中,Q i表示第i个广义坐标和广义速度对应的力。
拉格朗日方程推导(实用版)目录1.介绍拉格朗日方程2.推导拉格朗日方程3.应用拉格朗日方程4.总结正文一、介绍拉格朗日方程拉格朗日方程是分析力学的重要方程之一,由法国数学家约瑟夫·拉格朗日于 18 世纪末提出。
拉格朗日方程的功能相当于牛顿力学中的牛顿第二定律,可以用来描述物体的运动规律。
与牛顿第二定律不同的是,拉格朗日方程采用了广义坐标和广义速度的概念,因此具有更广泛的适用性。
二、推导拉格朗日方程为了推导拉格朗日方程,我们需要先了解广义坐标和广义速度的概念。
1.广义坐标:在经典力学中,我们通常使用笛卡尔坐标系来描述物体的位置,但在某些情况下,使用笛卡尔坐标系并不方便。
为了解决这个问题,我们引入了广义坐标的概念。
广义坐标是一个包含物体所有自由度的坐标系,其中每个自由度对应一个坐标。
2.广义速度:广义速度是物体在广义坐标系中的速度,可以表示为广义坐标的导数。
有了广义坐标和广义速度的概念,我们可以开始推导拉格朗日方程。
拉格朗日方程的推导过程较为复杂,涉及到拉格朗日量的概念。
拉格朗日量是描述物体运动状态的函数,包含物体的动能和势能。
通过对拉格朗日量求导,我们可以得到拉格朗日方程。
三、应用拉格朗日方程拉格朗日方程在物理学中有广泛的应用,下面举一个简单的例子来说明如何应用拉格朗日方程。
假设有一个质点沿着 x 轴运动,受到一个沿 x 轴的力 F 作用。
我们可以用拉格朗日方程来描述这个问题。
首先,我们需要确定物体的广义坐标和广义速度。
在这个问题中,广义坐标为 x,广义速度为 dx/dt。
然后,我们需要确定拉格朗日量,即动能和势能之和。
由于物体沿 x 轴运动,势能为 0,动能为 1/2mv^2。
因此,拉格朗日量为 1/2mv^2。
接下来,我们对拉格朗日量求导,并令其等于力 F。
通过求解这个方程,我们可以得到物体的运动规律。
四、总结拉格朗日方程是分析力学中的一个重要方程,可以用来描述物体的运动规律。
通过引入广义坐标和广义速度的概念,拉格朗日方程具有更广泛的适用性。

静电场的拉格朗日方程
拉格朗日电场方程(LFE)是电学理论中最重要的方程之一,它是用来研究电场中分布的静态电势的基本方程。
它是由法国物理学家Laplesi在1798年提出的,此后被广泛应用于物理学,特别是用于描述和解释静电场的情况。
拉格朗日电场方程的模型是下面的函数表达式:
V(x,y,z)= ∇²V(x,y,z)=0
在该方程中,V(x,y,z)表示电场中电势的分布,∇²V(x,y,z)是一个拉格朗日算子(二重梯度),表示在某个给定点处,电势的变化量。
拉格朗日电场方程可以帮助我们确定电荷在电场中的情况,因为其能够帮助分析电场中极其重要的电势分布,从而可以用它来确定电荷在电场中的具体位置和分布。
根据这个方程,我们可以算出电场中的电势的值,以此来计算电荷的位置和分布。
拉格朗日方程推导1. 引言拉格朗日方程是经典力学中的重要工具,用于描述质点、刚体或者连续体的运动。
它是以法国数学家约瑟夫·路易·拉格朗日(Joseph Louis Lagrange)的名字命名的,是一种基于能量原理的变分方法。
通过使用拉格朗日方程,我们可以从一个系统的动能和势能推导出该系统的运动方程。
本文将详细介绍拉格朗日方程的推导过程,并给出一些实际问题的例子来说明其应用。
2. 基本概念在开始推导拉格朗日方程之前,我们需要了解几个基本概念:2.1 广义坐标广义坐标是描述系统状态的变量,可以是位置、角度或者其他合适的参数。
我们用q i表示第i个广义坐标,其中i可以是1、2、3…n。
2.2 广义速度广义速度是广义坐标随时间变化的导数,用q̇i表示。
2.3 广义动能广义动能表示系统中所有质点(或刚体)运动所具有的总能量。
对于质点而言,广义动能可以写作T=12mq̇2,其中m是质点的质量。
对于刚体或连续体而言,广义动能的表达式会有所不同。
2.4 广义势能广义势能表示系统中所有与位置相关的势能总和。
用V表示。
3. 拉格朗日方程的推导拉格朗日方程的推导基于哈密顿原理(或称为最小作用量原理)。
哈密顿原理认为,在所有可能的路径中,真实的路径是使作用量S取极小值的路径。
3.1 作用量作用量是描述系统在一段时间内经历的运动轨迹所需要付出的代价。
对于一段时间从t1到t2内,系统在广义坐标q i(t)下进行运动,其作用量可以表示为:S=∫(T−V)t2t1dt其中T是广义动能,V是广义势能。
3.2 哈密顿原理根据哈密顿原理,真实路径所对应的作用量S必须满足变分条件:δS=δ∫(T−V)t2t1dt=0我们可以将变分操作放在积分符号内部:∫(δT−δV)t2t1dt=03.3 变分操作我们对广义坐标q i(t)进行微小变动δq i(t),则广义速度q̇i的变化量可以表示为:δq̇i=ddt (δq i)根据链式法则,上式可以改写为:d dt (δq i)=∂∂t(δq i)+∑∂q j∂tnj=1∂∂q j(δq i)3.4 广义速度的变分我们可以将广义速度的变分表示为:δq̇i=∂∂t(δq i)+∑q̇jnj=1∂∂q j(δq i)3.5 广义动能的变分广义动能的变分可以表示为:δT=∑[∂T∂q iδq i+∂T∂q̇iδq̇i]n i=1=∑[∂T∂q iδq i+mq̈i(t)δq i]n i=1=∑[∂T∂q i−ddt(∂T∂q̇i)]ni=1δq i 3.6 广义势能的变分广义势能的变分可以表示为:δV=∑∂V ∂q ini=1δq i 3.7 拉格朗日方程的推导将3.5和3.6两式代入3.2,我们得到:∫[∑(∂T∂q i−ddt(∂T∂q̇i))ni=1−∑∂V∂q ini=1]t2t1δq i dt=0由于δq i是任意的,上式中括号内的表达式必须为零,即:∑(∂T∂q i−ddt(∂T∂q̇i))ni=1−∑∂V∂q ini=1=0这就是拉格朗日方程。
拉格朗日方程组拉格朗日方程组是经典力学中一种重要的数学工具,用于描述物体在给定势能下的运动。
它由法国数学家拉格朗日于18世纪提出,是一种基于能量守恒原理的变分方法。
拉格朗日方程组在物理学、工程学等领域具有广泛的应用,可以用于研究多体系统的运动、稳定性等问题。
拉格朗日方程的基本原理拉格朗日方程的基本原理是以最小作用量原理为基础的。
最小作用量原理认为,物体在运动过程中,其实际路径是使作用量最小的路径。
作用量可以看作是物体在运动过程中受到的所有作用力的积分,可以表示为:S=∫Ldt其中,L是拉格朗日函数,t是时间。
拉格朗日函数L是系统的动能T与势能V的差值,即L=T−V。
根据哈密顿原理,最小作用量原理可以转化为运动方程的变分问题。
拉格朗日方程的推导过程为了推导拉格朗日方程,我们首先需要定义广义坐标。
广义坐标是一组独立的变量,可以完全描述系统的状态。
假设系统有n个自由度,那么可以选择n个广义坐标q1,q2,...,q n。
系统的广义速度可以表示为q i对时间的导数q i。
接下来,我们定义拉格朗日函数L。
拉格朗日函数是系统的动能T与势能V的差值,即L=T−V。
动能T可以表示为广义速度的函数,即T=T(q1,q2,...,q n,q1,q2,...,q n)。
势能V可以表示为广义坐标的函数,即V=V(q1,q2,...,q n)。
因此,拉格朗日函数可以表示为:L=L(q1,q2,...,q n,q1,q2,...,q n)根据最小作用量原理,我们需要求解使作用量S最小的路径。
根据变分法,我们可以对广义坐标q i进行变分δq i,使得作用量的变分为零。
即:δS=δ∫Ldt=0根据变分法的性质,我们可以将变分操作符δ移到积分号内部,得到:∫δLdt=0由于δL是L对广义坐标q i和广义速度q i的变分,我们可以将其表示为:δL=∂L∂q iδq i+∂L∂q iδq i根据变分法的链式法则,我们有δq i=ddt(δq i)。
拉格朗日方程组拉格朗日方程组,是经典力学中的基本方程之一。
它利用能量原理和运动学关系,描述了物体在给定约束下的运动规律。
拉格朗日方程组的研究有助于我们深入了解物体的运动轨迹和动力学特性,同时在物理学、工程学等领域具有广泛的应用。
拉格朗日方程组最早由意大利数学家拉格朗日在18世纪提出,他将经典力学问题转化为一种优雅而简洁的形式。
这种形式与牛顿力学的运动方程相比,更适合处理复杂系统的动力学问题。
拉格朗日方程组的基本思想是建立一个广义坐标和广义速度的函数,称为拉格朗日函数。
这个函数包含了系统的动能和势能,通过改变坐标和速度的函数来描述系统的运动。
通过对拉格朗日函数求导,可以得到拉格朗日方程组。
在研究力学问题时,我们首先需要确定系统中的约束条件。
这些约束条件可能是由于系统的物理特性而导致的,如刚体的约束或弹性体的形变约束。
一旦约束条件确定,我们就可以从系统中选择适当的广义坐标。
这些广义坐标通常是能够描述系统所固有的自由度的变量。
为了简化问题,我们通常选择与系统中不可约束自由度相关的广义坐标。
在确定了广义坐标之后,我们可以通过对拉格朗日函数进行变分,得到系统的运动方程。
这些方程描述了系统中每个坐标的变化规律,从而给出了物体运动的完整描述。
拉格朗日方程组有许多优点。
首先,它们可以描述复杂系统的运动,包括多自由度、多约束系统和非惯性系中的问题。
其次,拉格朗日方程组可以通过微积分中的变分法来推导,这种方法更加直观和易于推广。
拉格朗日方程组在科学研究和工程实践中具有广泛的应用。
在天体力学中,拉格朗日方程组被用来描述行星、恒星和卫星的运动轨迹。
在机械工程中,拉格朗日方程组被用来分析刚体的运动和机构的设计。
在物理学中,拉格朗日方程组被广泛应用于量子力学和统计力学的研究。
在实际应用中,我们通常需要根据具体问题的特点,选择适当的广义坐标,并结合拉格朗日方程组进行数值求解。
这可以通过计算机模拟和数值方法来实现,以得到系统的精确解或近似解。
拉格朗日方程表达式拉格朗日方程表达式,这玩意儿听起来是不是有点高大上?就好像是数学世界里的神秘密码,一般人乍一听可能会觉得晕头转向。
其实啊,它没那么可怕。
咱们就把拉格朗日方程表达式想象成一个超级工具,这个工具是用来解决物理问题里的动力学部分的,就像一把万能钥匙,能打开很多扇复杂的物理大门。
你要是学物理的,就会发现这方程表达式就像是你在迷宫里的一个可靠向导。
拉格朗日方程表达式呢,它是基于能量的概念建立起来的。
这怎么理解呢?就好比我们盖房子,以前可能是一块砖一块砖地去计算受力什么的,特别麻烦。
现在拉格朗日方程表达式就像是用一种全新的盖房子理念,从能量这个大局观出发。
能量就像是房子的整体框架,我们通过这个框架就能更方便地知道房子各个部分是怎么相互作用的。
这个方程表达式的形式有点像一个精心制作的拼图。
它里面的每一项都像是拼图的一块,而且每一块都有它独特的意义和位置。
如果哪一块放错了,整个拼图就没法完成,就像在解题的时候,如果方程里的某一项理解错了或者用错了,那答案肯定是不对的。
比如说,有个小球在斜面上滚动的问题。
要是用以前的方法,我们得分析小球受到的重力、斜面的支持力、摩擦力这些力的大小和方向,然后根据牛顿定律去计算小球的运动状态。
这就像是走一条布满荆棘的小路,一不小心就会出错。
可是用拉格朗日方程表达式就不一样了。
我们可以从能量的角度去看这个问题,小球的动能、重力势能这些能量之间的转换关系,通过拉格朗日方程表达式一下子就能把小球的运动状态求出来。
这就好比我们开了一辆汽车,直接从大道上就到达目的地了,又快又稳。
拉格朗日方程表达式里有广义坐标、广义速度这些概念。
广义坐标就像是我们给物理系统的每个成员都分配了一个特殊的身份标签。
每个标签都能让我们更清楚地描述这个系统的状态。
广义速度呢,就像是这些成员在这个身份下的行动速度。
它们组合在一起,就像一个团队里的每个成员都知道自己该干什么,以多快的速度去干,这样整个团队才能高效地运转起来。