第2章 拉格朗日方程
- 格式:ppt
- 大小:7.33 MB
- 文档页数:30
2、第二类拉格朗日方程的应用例1质量为m 1的物块C 以细绳跨过定滑轮B 联于点A, A ,B 两轮皆为均质圆盘,半径为R ,质量为m 2, 弹簧刚度为k ,质量不计。
ACOxAOCx例2已知:如图所示的运动系统中,重物M 1的质量为m 1,可沿光滑水平面移动。
摆锤M 2的质量为m 2,两个物体用长为l 的无重杆连接。
M 1M 2φC 求:此系统的运动微分方程。
2、第二类拉格朗日方程的应用解:系统有两个自由度,选M 1的水平坐标x 1和φ为广义坐标, 并将质点位置用广义坐标表示:111212,0;sin ,cos x x y x x l y l j j===-=将上式两端对时间t 求导数得:111212,0;cos sin x x yx x l y l j j j j ===-=-&&&&&&&&,系统的动能为:222122211()22T m x m x y =++&&&22212111()(2cos )22m l m m x l x j j j =++-&&&&选质点M 2在最低处时的位置为系统的零势能位置,则系统的势能为:)cos 1(2j -=gl m V 系统的主动力为有势力,此为保守系统,可写出系统的动势,运用保守系统的拉格朗日方程求解,此处我们运用一般形式的第二类拉格朗日方程求解。
d 0(12)d k T TQ k N t q q æö¶¶--==ç÷¶¶L &,,,注意:零势能位置的选取不是唯一的。
选取原则:计算方便代入拉格朗日方程得到:1212110()cos T Tm m xm l x xj j ¶¶==+-¶¶&&&,2121221d ()()cos sin d T m m x m l m l t x j j j j¶=+-+׶&&&&&&10x V Q x ¶=-=¶先计算)cos 1(2j -=gl m V 22212111()(2cos )22m l T m m x l xj j j =++-&&&&221221sin cos T T m lx m l mlx j j jj j j¶¶==-¶¶&&&&&,222121d ()cos sin d T m l m lx m lx t jj j j j ¶=-+׶&&&&&&&2sin V Q m gl j j j¶=-=-¶212122()cos sin 0m m xm l m l j j j j +-+×=&&&&&(cos sin )sin 0m l l x x m gl jj j j j -+×+=&&&&&&2、第二类拉格朗日方程的应用x 1φ再计算如果质点M 2摆动很小,可以近似地认为1cos sin »»j j j ,且可以忽略含和的高阶小量,2j &1xj &&微分方程可改写为:1212()0m m xm l j +-=&&&&1l x g jj -=-&&&&从以上两式中消去,得到1x&&1210m m gm lj j ++=&&这是自由振动的微分方程,其通解为:)sin(0q w j +=t A 固有角频率:lgm m m 1210+=w 摆动周期:如果21m m >>则质点M 1的位移x 1将很小,质点M 2的摆动周期将趋于普通单摆的周期:1lim 2m T ®¥=也可以从微分方程中消去,得到:j&&可见质点M 1沿x 方向也作自由振动。
拉格朗日方程是理论力学中非常重要的方程。
像牛顿力学一样,它是对机械系统的描述。
但是与牛顿力学不同,他从整个系统的角度分析了系统的运动状态,而牛顿力学则分别分析了每个粒子。
这两种方法是等效的,可以相互推论,但使用方案却大不相同。
拉格朗日方程以数学物理学家约瑟夫·拉格朗日(Joseph Lagrange)的名字命名,是分析力学中的重要方程,可用于描述物体的运动,特别适合于理论物理学的研究。
拉格朗日方程的功能等效于牛顿力学中的牛顿第二定律。
假定一个物理系统满足一个完整系统的要求,即所有广义坐标彼此独立,则拉格朗日方程式为:其中,是拉格朗日量,广义坐标,时间函数和广义速度。
以分析力学为指导,有三种方法可以指导拉格朗日方程。
最原始的方法是使用D'Alembert原理来指导Lagrange方程(请参阅D'Alembert原理)。
在更高级的水平上,拉格朗日方程可从哈密顿原理(指哈密顿原理)推导。
最简而言之,它可以通过数学变分方法的欧拉-拉格朗日方程推导:集合函数sum:,,,;哪里是自变量。
如果该函数获得局部平稳值,则Euler-Lagrange方程将保持在区间。
现在,进行以下变换:将自变量设置为时间,将函数设置为广义坐标,并将函数设置为拉格朗日量,从而可以获得拉格朗日方程。
为了满足此转换的正确性,广义坐标必
须彼此独立,因此系统必须是完整的系统。
拉格朗日量是动能减去势,势必须是广义势。
因此,该系统必须是单人系统。

欧拉-拉格朗日方程【概述】欧拉−拉格朗日方程(Euler−Lagrange Equation)又称为Lagrange变分法,是一个重要的数学方程。
是由著名数学家Euler和Lagrange共同发现的。
它提供了一种简便有效的方法来求解多元复杂的函数的极大或极小值。
欧拉-拉格朗日方程实际上是也被称作动力系统的微分方程的一种表示形式【原理】欧拉-拉格朗日方程是一条带微分的方程,它是由拉格朗日变分法推出的,其形式如下:$$\frac{\delta\Psi}{\delta y_i}=0$$其中,$y_i$是需要求导的函数的变量;$\Psi$是不可微的函数,它是拉格朗日函数,也叫做动作函数。
具体地说,拉格朗日变分法要求最后计算出的函数值极大时其微分值应该为零,这样就可以使函数值朝着极大值方向变动,而拉格朗日函数记录了变分值之间的微分值大小以及函数变动的方向,因而可以推出欧拉-拉格朗日方程来求解函数本身的极大值或者极小值。
【优点】(1) 欧拉-拉格朗日方程可以不断调整变量,改变函数值,以达到求对对函数的极大值的极小值的目的。
(2) 求解欧拉-拉格朗日方程时涉及到微积分,可以简化解题步骤,省去需要繁琐的推导步骤,从而节省时间。
(3) 此方法可以有效地解决多元变量和复杂函数问题,有效提高解算精度。
【应用】(1) 力学中,欧拉-拉格朗日方程用来求解极小总动量及极小流体效率等。
(2) 工程中,用欧拉-拉格朗日方程来求解某种参数取得某种最佳效果的优化方程。
(3) 电子工程中,欧拉-拉格朗日方程可以用来求解电子电路中、集成电路中最优参数计算问题。
(4) 生物学中,欧拉-拉格朗日方程在对一定植物对环境适应度进行优化时可以得到很好的应用。
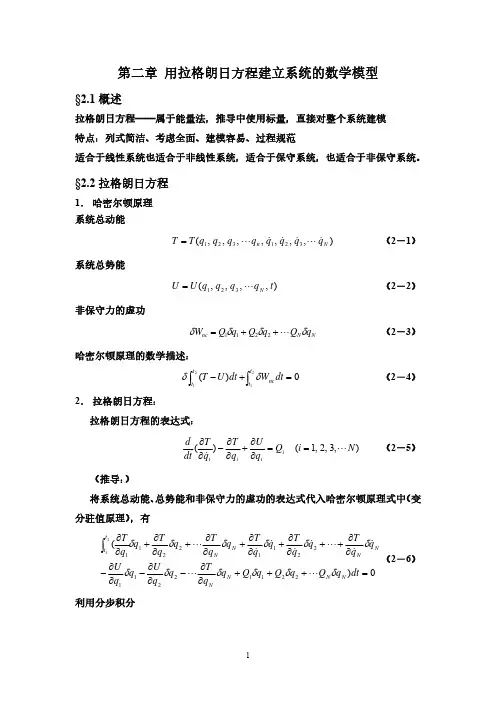
第二章 用拉格朗日方程建立系统的数学模型§2.1概述拉格朗日方程——属于能量法,推导中使用标量,直接对整个系统建模 特点:列式简洁、考虑全面、建模容易、过程规范适合于线性系统也适合于非线性系统,适合于保守系统,也适合于非保守系统。
§2.2拉格朗日方程1. 哈密尔顿原理 系统总动能),,,,,,,(321321N n q q q qq q q q T T = (2-1)系统总势能),,,,(321t q q q q U U N =(2-2)非保守力的虚功N N nc q Q q Q q Q W δδδδ ++=2211(2-3)哈密尔顿原理的数学描述:0)(2121=+-⎰⎰t t nc t t dt W dt U T δδ (2-4)2. 拉格朗日方程: 拉格朗日方程的表达式:),3,2,1()(N i Q q Uq T q T dt d iii i ==∂∂+∂∂-∂∂ (2-5)(推导:)将系统总动能、总势能和非保守力的虚功的表达式代入哈密尔顿原理式中(变分驻值原理),有0)(221122112211221121=+++∂∂-∂∂-∂∂-∂∂++∂∂+∂∂+∂∂+∂∂+∂∂⎰dt q Q q Q q Q q q Tq q U q q U q qTq q T q q T q q T q q T q q T N N N NN N N N t t δδδδδδδδδδδδ (2-6)利用分步积分dt q q Tdt d q qT dt q q T i t t i t t i i i t t i δδδ⎰⎰∂∂-∂∂=∂∂212121)(][ (2-7)并注意到端点不变分(端点变分为零)0)()(21==t q t q i i δδ (2-8)故dt q q T dt d dt q qTi i t t i t t i δδ)(2121∂∂-=∂∂⎰⎰(2-9)从而有0)])([211=+∂∂-∂∂+∂∂-⎰∑=dt q Q q Uq T q T dt d i i it t i i Ni δ ( (2-10)由变分学原理的基本引理:(设 n 维向量函数M(t),在区间],[0f t t 内处处连续,在],[0f t t 内具有二阶连续导数,在f t t ,0处为零,并对任意选取的n 维向量函数)(t η,有⎰=ft t T dt t M t 00)()(η则在整个区间],[0f t t 内,有 0)(≡t M )我们可以得到:0)(=+∂∂-∂∂+∂∂-i ii i Q q U q T q T dt d (2-11)即i ii i Q q U q T q T dt d =∂∂+∂∂-∂∂)( (2-12)对非保守系统,阻尼力是一种典型的非保守力,如果采用线性粘性阻尼模型,则阻尼力与广义速度}{q成正比,在这种情况下,可引入瑞利耗散(耗能)函数D ,}]{[}{21q C q D T≡ (2-13) 阻尼力产生的广义非保守力为:i i qDQ ∂∂-= (2-14) 对于仅受有势力和线性阻尼力作用的系统,其拉格朗日方程为:0)(=∂∂+∂∂+∂∂-∂∂qD q U q T q T dt d i i i (2-15) 如果系统上还作用了除有势力和阻尼力以外的非保守力,如结构受到的外激励力(对应的广义非保守力可通过非保守力的虚功求得,仍记为i Q ),则系统的拉格朗日方程为:i i i i Q qD q U q T q T dt d =∂∂+∂∂+∂∂-∂∂ )( (2-16) §2.3 拉格朗日方程在振动系统建模中应用在某些结构振动问题中,取分离体、确定各分离体的受力情况,然后利用牛顿第二定律建立方程的方法不一定可用,或者很不方便,这时,采用拉格朗日方程来建立振动方程就很方便。
定义:拉格朗日方程,因约瑟夫·路易斯·拉格朗日而命名,是拉格朗日力学的主要方程,可以用来描述物体的运动,特别适用于理论物理的研究。
拉格朗日方程的功能相等于牛顿力学中的牛顿第二定律。
拉格朗日方程:对于完整系统用广义坐标表示的动力方程,通常系指第二类拉格朗日方程,是法国数学家J.-L.拉格朗日首先导出的。
通常可写成:式中T为系统用各广义坐标qj和各广义速度q'j所表示的动能;Qj为对应于qj 的广义力;N(=3n-k)为这完整系统的自由度;n为系统的质点数;k为完整约束方程个数。
从虚位移原理可以得到受理想约束的质点系不含约束力的平衡方程,而动静法(达朗贝尔原理)则将列写平衡方程的静力学方法应用于建立质点系的动力学方程,将这两者结合起来,便可得到不含约束力的质点系动力学方程,这就是动力学普遍方程。
而拉格朗日方程则是动力学普遍方程在广义坐标下的具体表现形式。
拉格朗日方程可以用来建立不含约束力的动力学方程,也可以用来在给定系统运动规律的情况下求解作用在系统上的主动力。
如果要想求约束力,可以将拉格朗日方程与动静法或动量定理(或质心运动定理)联用。
通常,我们将牛顿定律及建立在此基础上的力学理论称为牛顿力学(也称矢量力学),将拉格朗日方程及建立在此基础上的理论称为拉格朗日力学。
拉格朗日力学通过位形空间描述力学系统的运动,它适合于研究受约束质点系的运动。
拉格朗日力学在解决微幅振动问题和刚体动力学的一些问题的过程中起了重要的作用。
拉格朗日插值公式(外文名Lagrange interpolation formula)指的是在节点上给出节点基函数,然后做基函数的线性组合,组合系数为节点函数值的一种插值多项式。
公式线性插值也叫两点插值,已知函数y = f(x)在给定互异点x0, x1上的值为y0= f(x0),y1= f(x1)线性插值就是构造一个一次多项式P1(x) = ax + b使它满足条件P1(x0) = y0P1(x1) = y1其几何解释就是一条直线,通过已知点A (x0, y0),B(x1, y1)。
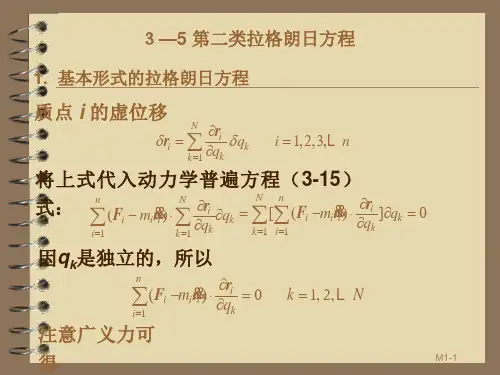
非完整体系的拉格朗日方程
理想约束、完整体系的拉格朗日方程:第二类拉格朗日方程
理想约束、非完整体系(非完整约束—微分约束)的拉格朗日方程:第一类拉格朗日方程
对于线性微分:设体系受到k外还受到m个微分约束,约束方程为:
Or
对于完整体系的拉格朗日方程是从达朗贝尔方程中消去非独立坐标,将k个完整约束条件带入达朗贝尔方程后得到:
如果系统没有其他不可积分的微分约束,则上式中的3S
n k =-个q α是相互独立的,若使上式
成立,则q αδ前面的系数为零,从而得到完整体系的拉格朗日方程。
若此时系统还受到m 个(不可积分的)微分约束,则上式中的S 个q α不是相互独立的,独立的广义坐标数目应为S
m -。
上式是对于完整体系下的虚位移,对于非完整体系: 体系作虚位移时:
用时间t的任意函数()
l
t
λ
乘以上式:
合并完整体系和非完整体系的两个表达式:
对于包含非完整体系的约束,由于S个qα中只有S m
-个是独
立的,因此不能令
q
α
δ
前面的系数为零,但是对于只要我们
适当选取m个条件,就可以使qα
δ
前面的系数为零,因此有:
例:
对于约束:C v 沿杆AB 方向,则x 和
y 在垂直于AB 方向上的投影为零。
此时:
00x y a dx a dy a d a dt θθ+++=
因为没有项,所以
将拉格朗日函数和上面的结果带入
由上式第3个方程:
其中:
;
αβ是积分常数。
由前两个方程得到:
→两边对 求导:
得到:
;γδ是积分常数。
其中:
ε为积分常数。