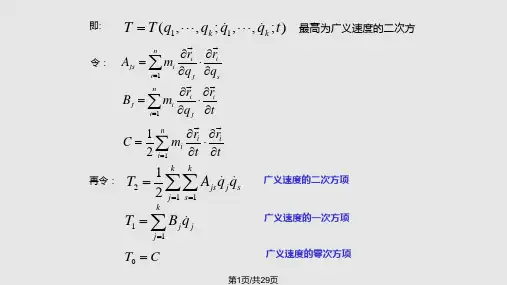
牛顿的《原理》只提供了分析质点受力与运动的原型,对于复杂的力学系 统,甚至对一个简单的刚体的运动方程也还没有弄清楚。刚体的运动方程是 1765年由欧拉(Euler)最后弄清楚的。 按照当时已有的力学知识,要分析一个稍许复杂的机构,例如一个有五级 齿轮的传动系统的运动,也还是无能为力的.如果拿这个问题去请教牛顿,牛顿 只会处理自由质点运动,不会处理刚体运动,何况还是带约束的呢.而转去请教 欧拉呢?他不得不将整个系统化归为五个”隔离体”即五个刚体,分别列出五个 刚体的运动方程,而不同刚体之间又有作用力和反作用力的耦合,所以得面对 数十个方程联立的微分方程组.这样处理问题是太复杂了. 拉格朗日自有他的高招,他将这个系统简化为一个广义坐标的系统,因 为这个虽然有五个轮子的系统只要有一个参数便可以描述它的例如随便以 其中某一个轮子的转角为参数,这个参数知道了,整个齿轮系统的状态也便 知道了.然后再计算当系统动起来后系统的动能.这时便可以列出一个广义 坐标满足的二阶方程,这是何等的简便啊! 拉格朗日是怎么作到这一点的呢?
O
x
1
自由度: 2
a A
2
广义坐标: 1 2
二、受力分析:
y
b
B
F
计算广义坐标 1 、 2 对应 的 广义力
FA
FB
以下分两种方法进行计算
O
x
1
第一种方法: 解析法
xi yi zi Qk X i q Yi q Z i q i 1 k k k
即用质点系的平衡条件是: 所有的广义力都等于零
利用广义坐标表示的平衡条件求解实际问题时,关健在 于如何表达其广义力。
通常求广义力的方法有两种:
方法一:是采用公式计算