O
(x1,y1)
A
P1
(x2,y2) B(x3,y3)
P2
F
(1)
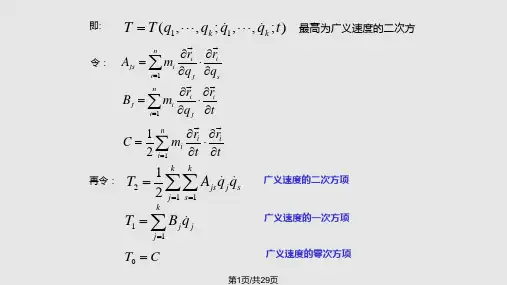
由已知条件可得
x1
1 2
l1 sin 1 l 2 sin (2)
x 2 l1 sin
2 y 3 l1 cos l 2 cos
把(2) 式代入(1) 式得
P1 (
1 2
l1 sin ) P2 ( l1 sin
x i x i ( q1 , q 2 , , q s , t ) y i y i ( q1 , q 2 , , q s , t ) z i z i ( q1 , q 2 , , q s , t )
或 式中
( i 1, 2 , , n , s 3 n )
ri ri ( q 1 , q 2 , , q s , t )
以上分量式若改用s 个独立广义坐标表示,然后令s 个独立的 虚位移前的乘数等于零,则可得出所求的平衡条件。 若求约束力,则要利用拉格朗日未定乘数。 广义坐标下 ri 的虚位移为
ri
n
s
ri
由此得广义坐标下的平衡方程是
W
Q
1
q
q 0
s
F
i 1 s
n
i n
i 1
虚功原理:受理想约束的力学体系平衡的充要条件是此力学 体系的诸主动力在任意虚位移中所做的元功之和为零。这就 是虚功原理,也叫虚位移原理。是1717年伯努利首先发现。 对于理想约束体系,利用虚功原理可以方便的求出主动力满 足的平衡条件,但无法求出约束反力。 由于约束,3n 个坐标不独立,即作用在任一质点上的合外 力在虚位移方向上的投影,一般不会全令之为零。否则就可 能变成n 个自由质点的平衡方程。