拉格朗日第二类方程
- 格式:ppt
- 大小:674.50 KB
- 文档页数:42
2、第二类拉格朗日方程的应用例1质量为m 1的物块C 以细绳跨过定滑轮B 联于点A, A ,B 两轮皆为均质圆盘,半径为R ,质量为m 2, 弹簧刚度为k ,质量不计。
ACOxAOCx例2已知:如图所示的运动系统中,重物M 1的质量为m 1,可沿光滑水平面移动。
摆锤M 2的质量为m 2,两个物体用长为l 的无重杆连接。
M 1M 2φC 求:此系统的运动微分方程。
2、第二类拉格朗日方程的应用解:系统有两个自由度,选M 1的水平坐标x 1和φ为广义坐标, 并将质点位置用广义坐标表示:111212,0;sin ,cos x x y x x l y l j j===-=将上式两端对时间t 求导数得:111212,0;cos sin x x yx x l y l j j j j ===-=-&&&&&&&&,系统的动能为:222122211()22T m x m x y =++&&&22212111()(2cos )22m l m m x l x j j j =++-&&&&选质点M 2在最低处时的位置为系统的零势能位置,则系统的势能为:)cos 1(2j -=gl m V 系统的主动力为有势力,此为保守系统,可写出系统的动势,运用保守系统的拉格朗日方程求解,此处我们运用一般形式的第二类拉格朗日方程求解。
d 0(12)d k T TQ k N t q q æö¶¶--==ç÷¶¶L &,,,注意:零势能位置的选取不是唯一的。
选取原则:计算方便代入拉格朗日方程得到:1212110()cos T Tm m xm l x xj j ¶¶==+-¶¶&&&,2121221d ()()cos sin d T m m x m l m l t x j j j j¶=+-+׶&&&&&&10x V Q x ¶=-=¶先计算)cos 1(2j -=gl m V 22212111()(2cos )22m l T m m x l xj j j =++-&&&&221221sin cos T T m lx m l mlx j j jj j j¶¶==-¶¶&&&&&,222121d ()cos sin d T m l m lx m lx t jj j j j ¶=-+׶&&&&&&&2sin V Q m gl j j j¶=-=-¶212122()cos sin 0m m xm l m l j j j j +-+×=&&&&&(cos sin )sin 0m l l x x m gl jj j j j -+×+=&&&&&&2、第二类拉格朗日方程的应用x 1φ再计算如果质点M 2摆动很小,可以近似地认为1cos sin »»j j j ,且可以忽略含和的高阶小量,2j &1xj &&微分方程可改写为:1212()0m m xm l j +-=&&&&1l x g jj -=-&&&&从以上两式中消去,得到1x&&1210m m gm lj j ++=&&这是自由振动的微分方程,其通解为:)sin(0q w j +=t A 固有角频率:lgm m m 1210+=w 摆动周期:如果21m m >>则质点M 1的位移x 1将很小,质点M 2的摆动周期将趋于普通单摆的周期:1lim 2m T ®¥=也可以从微分方程中消去,得到:j&&可见质点M 1沿x 方向也作自由振动。

拉格朗日第二类方程
拉格朗日第二类方程是经典力学中的基础概念之一。
它描述的是质点
在一定约束下的运动,是建立在尺度不变性原理的基础上的。
下面我
将按照以下列表分别介绍拉格朗日第二类方程的定义、推导过程以及
其应用。
1. 定义:
拉格朗日第二类方程是描述系统动力学的数学模型,它是由勒让德在1797年建立的,具体形式为:
d/dt (∂L/∂qᵢ) − ∂L/∂qᵢ = Qᵢ
其中,L是系统的拉格朗日函数,q是系统的广义坐标,Q是系统的非
保守力。
2. 推导过程:
拉格朗日第二类方程的推导主要分为以下几个步骤:
第一步,构建系统的拉格朗日函数,即L=T-V,其中T是系统的动能,V是系统的势能。
第二步,求出系统的广义动量pᵢ=∂L/∂qᵢ。
第三步,对广义动量求导得到系统的加速度aᵢ= d/dt (∂L/∂qᵢ)。
第四步,根据牛顿第二定律F=ma以及广义动量的定义pᵢ=∂L/∂qᵢ,将非保守力Q用广义动量表示为Qᵢ=∂V/∂qᵢ。
第五步,代入广义动量和非保守力的表达式,得到拉格朗日第二类方程d/dt (∂L/∂qᵢ) − ∂L/∂qᵢ = Qᵢ。
3. 应用:
拉格朗日第二类方程是经典力学中最基础的方程之一,它在物理学的各个领域都有广泛的应用,如
(1)陀螺的运动学研究
(2)杆的运动学研究
(3)学习简谐振动的方程
(4)学习经典电动力学中的运动方程
(5)学习光学中的光路方程等
总之,拉格朗日第二类方程在物理学研究中有着重要的地位,熟练掌握它的概念和应用对于探究自然界的规律和解决实际问题都具有重要作用。
船体振动基础1第章多自由度系统的振第2章多自由度系统的振动一、引言二、两自由度系统的振动三、多自由度系统的振动四、振动方程建立的其他方法2有阻尼的多自由度系统振动1、拉格朗日方程式1、拉格朗日方程式P38拉格朗日法是建立微分方程一种简单的方法:先求出系统的动能、势能,进而得出质量矩阵和刚度矩阵.优点:系统的动能和势能都是标量,无需考虑力的方向。
141、拉格朗日方程式P38拉格朗日第二类方程式适用于完整约束的系统。
完整约束完整约束:当约束方程本身或约束方程通过积分后可以下式所示的形式表示时,称为完整约束。
不完整约束:当约束方程本含有不能积分的速度项时,系统的约束称为不完整约束。
具有不完整约束的系统,系统的自由度不等于广义坐标数自由度数小于广义坐标数于广义坐标数,自由度数小于广义坐标数。
151、拉格朗日方程式P3811•位移方程和柔度矩阵P40对于静定结构,有时通过柔度矩阵建立位移方程比通过对于静定结构有时通过m1x1x2以准静态方式作用在梁上。
梁只产生位移(即挠度),不产生加速度。
的静平衡位置为坐标P1=1 f11 f21 f12P2=1 f22(1)P1 = 1、P2 = 0 时 m1 位移:x1 = f11 m2 位移:x2 = f 21 (3)P1、P2 同时作用 m1 位移: 位移 x1 = f11 P 1 + f12 P 2 m2 位移:x2 = f 21 P 1 + f 22 P 2(2)P1 = 0、P2 = 1 时 m1 位移:x1 = f12 m2 位移:x2 = f 22P1 m1 x1 x2 P2 m2P1=1 f11 f21 f12 P1 m1 x1P2=1 f22 P2 m2 x2P 同时作用时 1、P 2 同时作用时:x1 = f11P 1 + f12 P 2 x2 = f 21P 1 + f 22 P 2矩阵形式 X = FP 矩阵形式:⎡ x1 ⎤ X =⎢ ⎥ ⎣ x2 ⎦f ij 柔度影响系数f12 ⎤ f 22 ⎥ ⎦⎡ f11 F=⎢ ⎣ f 21⎡P 1⎤ P=⎢ ⎥ ⎣ P2 ⎦物理意义: 系统仅在第 j 个坐标受到 单位力作用时相应于第 i 个坐标上产生的位移柔度矩阵P1 m1 x1P2 m2 x2P1(t) m1 m2P2(t)&1 m1 & x&2 m2 & xX = FP⎡ x1 ⎤ ⎡ f11 ⎢x ⎥ = ⎢ f ⎣ 2 ⎦ ⎣ 21 f12 ⎤ ⎡ P 1⎤ ⎢P ⎥ f 22 ⎥ ⎦⎣ 2 ⎦当P 1、P 2 是动载荷时 集中质量上有惯性力存在⎡ x1 ⎤ ⎡ f11 ⎢x ⎥ = ⎢ f ⎣ 2 ⎦ ⎣ 21 f12 ⎤ ⎡ P && 1 (t ) − m1 x1 ⎤ ⎢ P (t ) − m & ⎥ f 22 ⎥ & x 2 2⎦ ⎦⎣ 2⎡ x1 ⎤ ⎡ f 11 ⎢x ⎥ = ⎢ f ⎣ 2 ⎦ ⎣ 21位移方程:f 12 ⎤⎛ ⎡ P1 (t ) ⎤ ⎡m1 ⎜⎢ −⎢ ⎥ ⎥ ⎜ f 22 ⎦⎝ ⎣ P2 (t ) ⎦ ⎣ 0&1 ⎤ ⎞ 0 ⎤⎡ & x ⎟ ⎥ ⎢ ⎥ &2 ⎦ ⎟ m2 ⎦ ⎣ & x ⎠&& ) X = F ( P − MXP1(t) m1 m2P2(t)⎡ x1 ⎤ X =⎢ ⎥ ⎣ x2 ⎦⎡P 1 (t ) ⎤ P=⎢ ⎥ P ( t ) ⎣ 2 ⎦&1 m1 & x&2 m2 & x位移方程 位移方程:&& ) X = F ( P − MX也可按作用力方程建立方程:&& + KX = P MX刚度矩阵&& + X = FP FMX柔度矩阵与刚度矩阵的关系 柔度矩阵与刚度矩阵的关系:&& KX = P − MX若K非奇异F=K−1FK = I&& ) X = K −1 ( P − MX应当注意:对于允许刚体运动产生的系统(即具有刚体自由度的系统) , 柔度矩阵不存在。
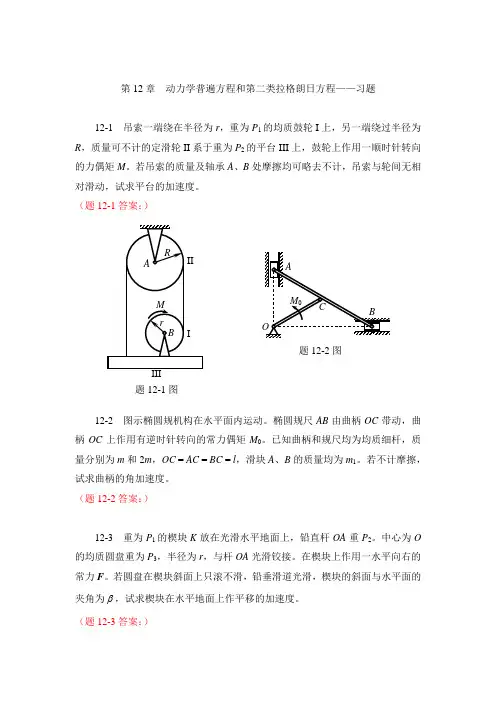
第12章 动力学普遍方程和第二类拉格朗日方程——习题12-1 吊索一端绕在半径为r ,重为P 1的均质鼓轮I 上,另一端绕过半径为R ,质量可不计的定滑轮II 系于重为P 2的平台III 上,鼓轮上作用一顺时针转向的力偶矩M 。
若吊索的质量及轴承A 、B 处摩擦均可略去不计,吊索与轮间无相对滑动,试求平台的加速度。
(题12-1答案:)12-2 图示椭圆规机构在水平面内运动。
椭圆规尺AB 由曲柄OC 带动,曲柄OC 上作用有逆时针转向的常力偶矩M 0。
已知曲柄和规尺均为均质细杆,质量分别为m 和2m ,OC = AC = BC = l ,滑块A 、B 的质量均为m 1。
若不计摩擦,试求曲柄的角加速度。
(题12-2答案:)12-3 重为P 1的楔块K 放在光滑水平地面上,铅直杆OA 重P 2。
中心为O 的均质圆盘重为P 3,半径为r ,与杆OA 光滑铰接。
在楔块上作用一水平向右的常力F 。
若圆盘在楔块斜面上只滚不滑,铅垂滑道光滑,楔块的斜面与水平面的夹角为 ,试求楔块在水平地面上作平移的加速度。
(题12-3答案:)题12-1图题12-2图12-4 四根质量均为m ,长度均为l 的均质直杆用光滑圆柱铰链连接成一菱形ABCD ,点A 用固定支座与大地相连,点C 通过质量可不计的滑块沿铅垂线运动,若不计摩擦,试求系统于图示位置( 30=ϕ)无初速释放的瞬间,四根杆的角加速度。
(题12-4答案:)12-5 如图所示,质量为m ,半径为r 的均质半圆盘在粗糙水平地面上作无滑动的滚动,试以圆心O 和质心C 的连线与铅垂线夹角θ为广义坐标写出其运动微分方程,并求其在平衡位置附近作微振动的周期。
(题12-5答案:)题12-3图题12-4图题12-6图12-6 如图所示,质量为m ,长度为l 的均质杆AB ,其A 端用刚度系数为k 的弹簧悬挂于铅垂滑道的上部,同时杆AB 还可以绕点A 在铅垂平面内摆动,不计与杆AB 铰接的滑轮A 的质量和各接触处摩擦,若以弹簧原长处为x 轴原点,试用拉格朗日方程导出杆关于图示广义坐标x 、θ的运动微分方程。

第3章拉格朗日方程以动力学普遍方程为基础,拉格朗日导出了两种形式的动力学方程,分别称为第一类和第二类拉格朗日方程。
将达朗贝尔原理与虚位移原理相结合,建立起动力学普遍方程,避免了理想约束力的出现;再把普遍方程变为广义坐标形式,进一步转变为能量形式,导出了第二类拉格朗日方程,实现了用最少数目的方程描述动力系统;应用数学分析中的乘子法,采用直角坐标形式的普遍方程和约束方程而建立的一组动力学方程,是第一类拉格朗日方程,便于程式化处理约束动力系统问题。
拉格朗日方程是分析力学得以发展之源。
3.1 第二类拉格朗日方程第二类拉格朗日方程是分析力学中最重要的动力学方程,它给出动力学问题一个普遍、简单而又统一的解法。
拉格朗日方程只适用于完整约束的质点系。
3.1.1 几个关系式的推证为方便起见,在推导拉格朗日方程前,先推证几个关系式。
质点系由n个质点、s个完整的理想约束组成,它的自由度数为k=3n–s,广义坐标数与自由度数相等。
该系统中,任一质点M i的矢径r i可表示成广义坐标q1,q2,…,q k和时间t的函数,即r i=r i(q1,q2,…,q k,t)i=1,2,…,n它的速度(3-1)i=1,2,…,n式中称为h个广义坐标的广义速度,分别为广义坐标和时间的函数,与广义速度没有直接的关系。
式(3-1)对求偏导数,则有(3-2)这是推证的第一个关系式,它表明,任一质点的速度对广义速度的偏导数等于其矢径对广义坐标的偏导数。
为推证第二个关系式,将式(3-1)对广义坐标q j求偏导数,或(3-3)这是第二个关系式,它表明,任一质点的速度对广义坐标的偏导数等于其矢径对广义坐标的偏导数,再对时间的一阶导数。
再看看质点的动能对广义坐标的偏导数。
有(A)又式(3-2)、式(3-3)代入上式,并注意式(A)的关系,(3-4)3.1.2 第二类拉格朗日方程动力学普遍方程可以改写为(3-5)左侧的第一项主动力的虚功之和,可以用广义力Q h在广义虚位移q h上所做的功之和表示,即(3-6)值得指出,这里的主动力并非平衡问题中的主动力,因此,这里的广义力Q h不等于零。
定义:拉格朗日方程,因约瑟夫·路易斯·拉格朗日而命名,是拉格朗日力学的主要方程,可以用来描述物体的运动,特别适用于理论物理的研究。
拉格朗日方程的功能相等于牛顿力学中的牛顿第二定律。
拉格朗日方程:对于完整系统用广义坐标表示的动力方程,通常系指第二类拉格朗日方程,是法国数学家J.-L.拉格朗日首先导出的。
通常可写成:式中T为系统用各广义坐标qj和各广义速度q'j所表示的动能;Qj为对应于qj 的广义力;N(=3n-k)为这完整系统的自由度;n为系统的质点数;k为完整约束方程个数。
从虚位移原理可以得到受理想约束的质点系不含约束力的平衡方程,而动静法(达朗贝尔原理)则将列写平衡方程的静力学方法应用于建立质点系的动力学方程,将这两者结合起来,便可得到不含约束力的质点系动力学方程,这就是动力学普遍方程。
而拉格朗日方程则是动力学普遍方程在广义坐标下的具体表现形式。
拉格朗日方程可以用来建立不含约束力的动力学方程,也可以用来在给定系统运动规律的情况下求解作用在系统上的主动力。
如果要想求约束力,可以将拉格朗日方程与动静法或动量定理(或质心运动定理)联用。
通常,我们将牛顿定律及建立在此基础上的力学理论称为牛顿力学(也称矢量力学),将拉格朗日方程及建立在此基础上的理论称为拉格朗日力学。
拉格朗日力学通过位形空间描述力学系统的运动,它适合于研究受约束质点系的运动。
拉格朗日力学在解决微幅振动问题和刚体动力学的一些问题的过程中起了重要的作用。
拉格朗日插值公式(外文名Lagrange interpolation formula)指的是在节点上给出节点基函数,然后做基函数的线性组合,组合系数为节点函数值的一种插值多项式。
公式线性插值也叫两点插值,已知函数y = f(x)在给定互异点x0, x1上的值为y0= f(x0),y1= f(x1)线性插值就是构造一个一次多项式P1(x) = ax + b使它满足条件P1(x0) = y0P1(x1) = y1其几何解释就是一条直线,通过已知点A (x0, y0),B(x1, y1)。