平面四杆机构的工作特性
- 格式:pptx
- 大小:458.96 KB
- 文档页数:7
具有急回特性的平面四杆机构的比较与应用急回特性是平面四杆机构的一个十分显著的特征,一般情况下,会用行程速比系数K来科学衡量急回运动的程度,准确科学分析平面连杆机构的急回运动特性在结构中的运运情况,这对提高我国机构生产的效率具有非常重要的现实指导意义与理论意义。
急回特性;平面四杆机构;应用;比较平面四杆机构[1]的重要特性就是急回特性,这种特性不仅能够显著提高我国工业生产的效率,而且可以进一步缩短机构在非工作行程中的运行时间,从而使工作运行的速度大幅度提升。
本文正式基于这样的研究背景,对四种典型平面四杆机构的急回特征进行分析,在此过程中对这四种不同的急回特征平面机构的动力传递以及运动变化情况、急回程度等内容展开论述,从实际的应用中针对上述问题进行阐述,从而希望平面四杆机构为我国的工程实践提供科学的技术与理论指导。
平面四杆机构急回特性的比较应用分析从实践中可以发现,双曲柄机构、曲柄摇杆机构、摆动导杆机构以及偏置曲柄滑块机构[2]这四种四杆结构都具有急回性特征,因此在一定程度上都能够满足我国现代工业中对某些机械的急回性要求。
但是研究发现,这几种不同类型的四杆机构的急回性特征都存在一定的区别,其中曲柄摇杆机构、摆动导杆机构以及偏置曲柄滑块机构这三种四杆机构如果组成各机构杆件的具体尺寸一旦确定,则意味着科学衡量四杆机构急回性特征的行程速比系数K与其参数极位夹角θ的值也就得到确定。
所以,在这过程中四杆机构的急回性特征并不发生变化。
与后三种四杆机构的急回性特征不同,在双曲柄四杆机构中用来科学衡量四杆机构的行程速比系数K与急回特性的参数极位夹角θ,同四杆机构主动件的起始相互位置存在一定的关系,如果主动曲柄的起始部位存在变化,就会导致机构的相关参数发生变化,因此四杆机构的急回程度也就存在差异。
从上述分析中可以发现,双曲柄四杆机构的急回性并不是固定不变的。
平面四杆机构运动转化的比较应用分析具有急回特性的平面四杆机构的主动件一般都是曲柄,因此机构在进行运动的过程中,曲柄的主动件就会环绕机架进行转动,而连杆通常情况下都在进行平面运动,但是曲柄的从动件则会有多种不同类型的机构形式以及多种不同类型的运动形式。
山东理工职业学院教案首页
2015-2016学年第二学期
四杆机构存在曲柄的条件和几个基本概念
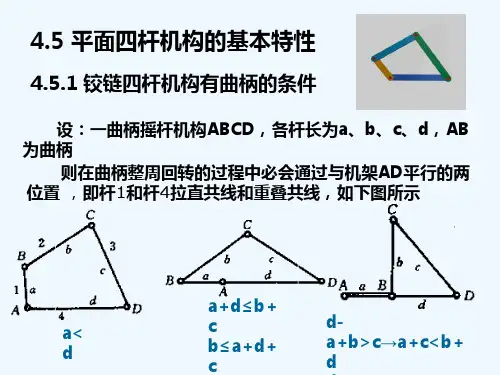
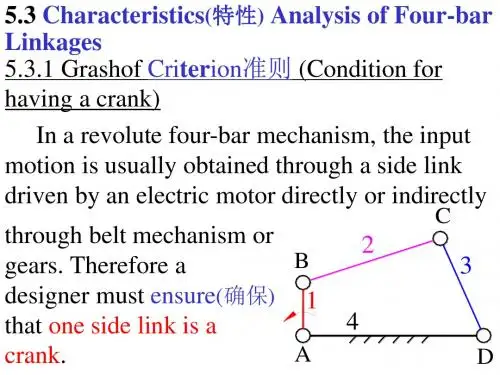
一、铰链四杆机构存在曲柄的条件
1.整转副存在的条件→杆长和条件:l max + l min = l 2 + l 3 2.曲柄存在的条件:1)机构满足杆长和条件 2)连架杆和机架中必有一杆为最短杆 3.铰链四杆机构基本类型的判别方法
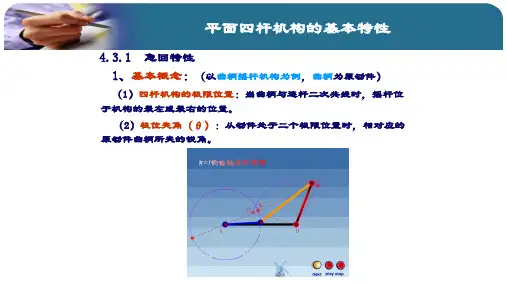
二、平面四杆机构的运动特性
1.平面连杆机构的极限位置与极位夹角 极限位置(极位):连杆与曲柄的两
次共线位置
极位夹角θ:曲柄对应两极限位置
所夹的锐角
2.平面连杆机构的急回特性
工作行程:从动件由C 1 →C 2 ,曲柄转过φ1,从动件C 点运动的速度为v 1
空回行程:从动件由C 2 →C 1 ,曲柄转过φ2,从动件C 点运动的速度为v 2
因曲柄匀速转动,故有v 2>v 1→即空回行程快于工作行程→急回特性 3.行程速比系数K :度量急回特性程度的物理量
θ
θ-+=
==οο180180//12121212t C C t C C v v K 或转换成 11180+-=K K οθ 各类机构的急回特性分析
三、平面四杆机构的传力性能
1、压力角与传动角 有效分力:αcos F F t = 有害分力:αsin F F n =。
平面四杆机构动力学分析平面四杆机构是一种常用的机构形式,它由四个连杆构成,每个连杆的两个端点分别与两个固定点和两个动点连接。
平面四杆机构广泛应用于工程和机械领域,如发动机连杆机构、机床传动机构等。
在对平面四杆机构进行动力学分析时,需要考虑连杆的运动学特性以及受力情况,以求得机构的运动学和动力学性能参数。
本文将介绍平面四杆机构动力学分析的基本方法和步骤。
首先,对平面四杆机构进行运动学分析,即确定连杆的几何参数和运动特性。
通过连杆的长度、角度和位置关系,可以建立连杆运动学方程。
平面四杆机构一般有两个输入连杆和两个输出连杆,输入连杆一般由驱动源(如电机)控制,输出连杆用于传递或产生所需的运动。
其次,根据连杆的几何关系和运动学方程,可以推导得到平面四杆机构的速度和加速度方程。
速度方程描述了各连杆的速度与输入连杆的关系,加速度方程描述了各连杆的加速度与输入连杆的关系。
通过求解速度和加速度方程,可以得到每个连杆的线速度和角速度,以及各连杆的线加速度和角加速度。
接下来,进行平面四杆机构的力学分析。
根据连杆的几何关系和受力分析,可以推导得到每个连杆的力学方程。
力学方程描述了各连杆受到的力和力矩与其他连杆的关系。
通过求解力学方程,可以得到每个连杆的受力和力矩大小以及方向,以及各连杆之间的力传递关系。
最后,根据连杆的运动学和力学特性,可以得到平面四杆机构的动力学性能参数,如位置、速度和加速度的关系、力和力矩的大小和方向等。
这些参数可以用于分析机构的运动和受力情况,并进一步优化设计。
需要注意的是,平面四杆机构的动力学分析是一个复杂的过程,需要考虑各连杆之间的相互作用和约束条件。
同时,还需要考虑连杆的质量和惯量等因素,以求得更精确的分析结果。
因此,在实际应用中,常采用计算机辅助分析方法,如数值模拟和仿真技术,以提高分析的准确性和效率。
综上所述,平面四杆机构的动力学分析是一项重要的工作,对于优化设计和性能评估具有重要意义。

机械设计中的平面四杆机构设计机械设计中的平面四杆机构设计是一项关键的技术,它对于机械设备的运动性能和工作效率具有重要影响。
在本文中,我们将探讨平面四杆机构的设计原理和方法,并重点讨论几种常见的平面四杆机构设计。
1. 平面四杆机构的基本原理平面四杆机构是由四个杆件和四个转动副组成的机械系统。
其中,两个杆件为连杆,两个杆件为曲柄。
通过合理的连接和安排,平面四杆机构可以实现特定的运动轨迹和工作功能。
平面四杆机构通常具有四个连杆长度、四个连杆转动角度和四个面间夹角等参数,这些参数的选择和设计将直接影响机构的性能。
2. 平面四杆机构的设计方法在平面四杆机构的设计过程中,需要注意以下几个关键要素:2.1 机构类型选择根据具体的工作需求和运动特点,选择合适的平面四杆机构类型。
常见的类型包括双曲柄四杆机构、双滑块四杆机构和连杆滑块四杆机构等。
每种类型的机构都有其特点和适用范围,设计者需要根据具体情况做出选择。
2.2 运动轨迹设计平面四杆机构的设计目标之一是确定所需的运动轨迹。
通过合理设置连杆长度和转动角度等参数,设计者可以使机构实现所需的直线运动、往复运动或者特定的曲线轨迹等。
2.3 运动性能评估在设计过程中,需要对平面四杆机构的运动性能进行评估。
常见的评估指标包括机构速度、加速度、运动稳定性和工作效率等。
通过使用运动分析软件或者手工计算,可以得到机构的具体性能参数。
3. 常见的平面四杆机构设计在实际应用中,有几种常见的平面四杆机构设计。
3.1 双曲柄四杆机构双曲柄四杆机构由两个曲柄和两个连杆组成,具有简单的结构和稳定的运动特性。
它常用于需要往复运动的机械设备中,例如活塞式发动机。
3.2 双滑块四杆机构双滑块四杆机构包含两个滑块和两个连杆,可实现两个滑块的相对运动。
这种结构常用于需要同时进行两个工作操作的装置,比如双手操作的印刷机械。
3.3 连杆滑块四杆机构连杆滑块四杆机构是由两个连杆和两个滑块组成,其中一个滑块在连杆上滑动。