第四章 数字控制器的直接设计2014
- 格式:ppt
- 大小:1.11 MB
- 文档页数:42

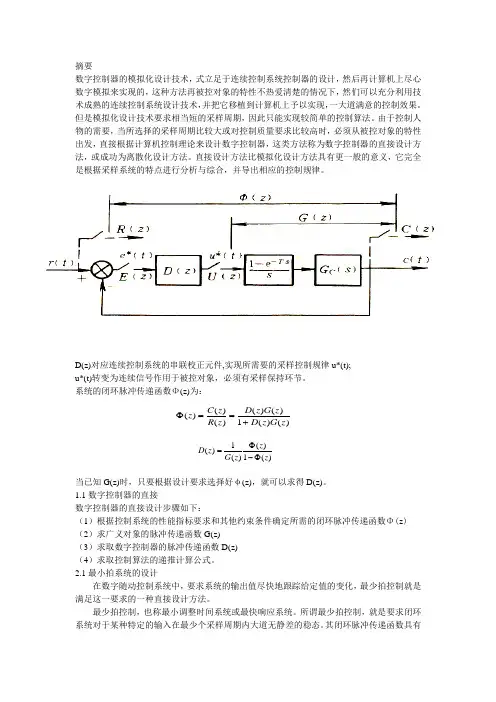
摘要数字控制器的模拟化设计技术,式立足于连续控制系统控制器的设计,然后再计算机上尽心数字模拟来实现的,这种方法再被控对象的特性不热爱清楚的情况下,然们可以充分利用技术成熟的连续控制系统设计技术,并把它移植到计算机上予以实现,一大道满意的控制效果。
但是模拟化设计技术要求相当短的采样周期,因此只能实现较简单的控制算法。
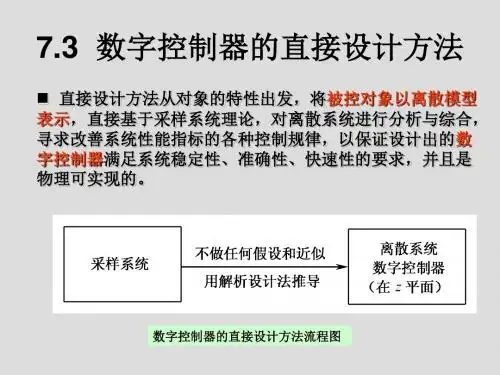
由于控制人物的需要,当所选择的采样周期比较大或对控制质量要求比较高时,必须从被控对象的特性出发,直接根据计算机控制理论来设计数字控制器,这类方法称为数字控制器的直接设计方法,或成功为离散化设计方法。
直接设计方法比模拟化设计方法具有更一般的意义,它完全是根据采样系统的特点进行分析与综合,并导出相应的控制规律。
D(z)对应连续控制系统的串联校正元件,实现所需要的采样控制规律u*(t);u*(t)转变为连续信号作用于被控对象,必须有采样保持环节。
系统的闭环脉冲传递函数Φ(z)为:当已知G(z)时,只要根据设计要求选择好φ(z),就可以求得D(z)。
1.1数字控制器的直接数字控制器的直接设计步骤如下:(1)根据控制系统的性能指标要求和其他约束条件确定所需的闭环脉冲传递函数Φ(z)(2)求广义对象的脉冲传递函数G(z)(3)求取数字控制器的脉冲传递函数D(z)(4)求取控制算法的递推计算公式。
2.1最小拍系统的设计在数字随动控制系统中,要求系统的输出值尽快地跟踪给定值的变化,最少拍控制就是满足这一要求的一种直接设计方法。
最少拍控制,也称最小调整时间系统或最快响应系统。
所谓最少拍控制,就是要求闭环系统对于某种特定的输入在最少个采样周期内大道无静差的稳态。
其闭环脉冲传递函数具有)()(1)()()()()(z G z D z G z D z R z C z +==Φ)(1)()(1)(z z z G z D Φ-Φ=以下形式式中n 是可能情况下的最小正整数。
这一形式表明闭环系统的脉冲响应在n 和采样周期后变为零,从而意味着系统在n 拍之内达到稳态。
第一章1. 什么是计算机控制系统? 它的工作原理是怎样的?2. 计算机控制系统由哪几部分组成? 请画出计算机控制系统的组成框图。
3. 计算机控制系统的典型型式有哪些?各有什么优缺点?4. 实时、在线方式和离线方式的含义是什么?5. 简述计算机控制系统的发展概况。
6. 讨论计算机控制系统的发展趋势。
第二章1. 什么是接口、接口技术和过程通道?2. 采用74LS244和74LS273与PC/ISA总线工业控制机接口,设计8路数字量(开关量)输入接口和8路数字量(开关量)输出接口,请画出接口电路原理图,并分别编写数字量输入和数字量输出程序。
3. 用8位A/D转换器ADC0809与PC/ISA总线工业控制机接口,实现8路模拟量采集。
请画出接口原理图,并设计出8路模拟量的数据采集程序。
4. 用12位A/D转换器AD574与PC/ISA总线工业控制机接口,实现模拟量采集。
请画出接口电路原理图,并设计出A/D转换程序。
5. 请分别画出一路有源I/V变换电路和一路无源I/V变换电路图,并分别说明各元器件的作用?6. 什么是采样过程、量化、孔径时间?7. 采样保持器的作用是什么?是否所有的模拟量输入通道中都需要采样保持器?为什么?8. 一个8位A/D转换器,孔径时间为100μS,如果要求转换误差在A/D转换器的转换精度(0.4%)内,求允许转换的正弦波模拟信号的最大频率是多少?9. 试AD574、LF398、CD4051和PC/ISA总线工业控制机接口,设计出8路模拟量采集系统,请画出接口电路原理图,并编写相应的8路模拟量数据采集程序。
10. 采用DAC0832和PC/ISA总线工业控制机接口,请画出接口电路原理图,并编写D/A 转换程序。
11. 采用DAC1210和PC/ISA总线工业控制机接口,请画出接口电路原理图,并编写D/A 转换程序。
12. 请分别画出D/A转换器的单极性和双极性电压输出电路,并分别推导出输出电压与输入数字量之间的关系式。