第五章数字控制器直接设计方法
- 格式:ppt
- 大小:562.50 KB
- 文档页数:15
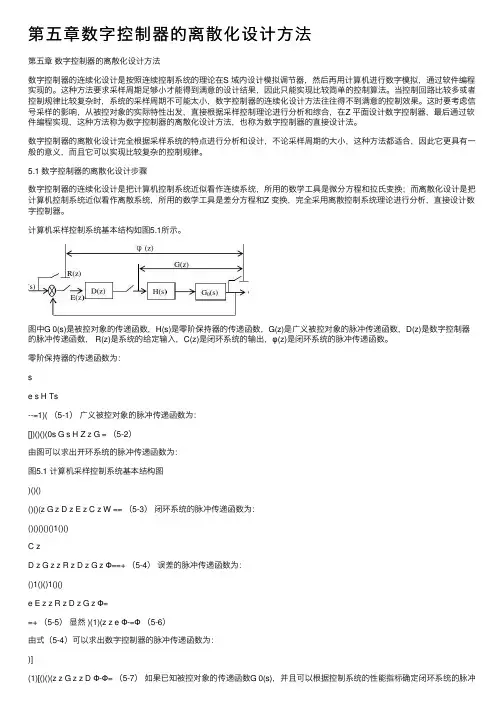
第五章数字控制器的离散化设计⽅法第五章数字控制器的离散化设计⽅法数字控制器的连续化设计是按照连续控制系统的理论在S 域内设计模拟调节器,然后再⽤计算机进⾏数字模拟,通过软件编程实现的。
这种⽅法要求采样周期⾜够⼩才能得到满意的设计结果,因此只能实现⽐较简单的控制算法。
当控制回路⽐较多或者控制规律⽐较复杂时,系统的采样周期不可能太⼩,数字控制器的连续化设计⽅法往往得不到满意的控制效果。
这时要考虑信号采样的影响,从被控对象的实际特性出发,直接根据采样控制理论进⾏分析和综合,在Z 平⾯设计数字控制器,最后通过软件编程实现,这种⽅法称为数字控制器的离散化设计⽅法,也称为数字控制器的直接设计法。
数字控制器的离散化设计完全根据采样系统的特点进⾏分析和设计,不论采样周期的⼤⼩,这种⽅法都适合,因此它更具有⼀般的意义,⽽且它可以实现⽐较复杂的控制规律。
5.1 数字控制器的离散化设计步骤数字控制器的连续化设计是把计算机控制系统近似看作连续系统,所⽤的数学⼯具是微分⽅程和拉⽒变换;⽽离散化设计是把计算机控制系统近似看作离散系统,所⽤的数学⼯具是差分⽅程和Z 变换,完全采⽤离散控制系统理论进⾏分析,直接设计数字控制器。
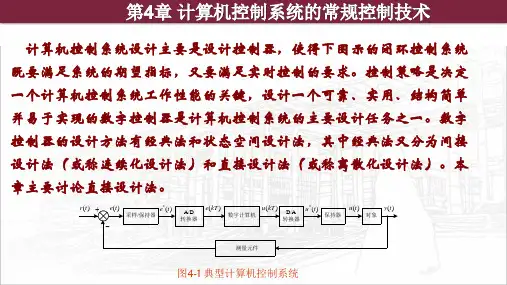
计算机采样控制系统基本结构如图5.1所⽰。
图中G 0(s)是被控对象的传递函数,H(s)是零阶保持器的传递函数,G(z)是⼴义被控对象的脉冲传递函数,D(z)是数字控制器的脉冲传递函数, R(z)是系统的给定输⼊,C(z)是闭环系统的输出,φ(z)是闭环系统的脉冲传递函数。
零阶保持器的传递函数为:se s H Ts--=1)( (5-1)⼴义被控对象的脉冲传递函数为:[])()()(0s G s H Z z G = (5-2)由图可以求出开环系统的脉冲传递函数为:图5.1 计算机采样控制系统基本结构图)()()()()(z G z D z E z C z W == (5-3)闭环系统的脉冲传递函数为:()()()()()1()()C zD z G z z R z D z G z Φ==+ (5-4)误差的脉冲传递函数为:()1()()1()()e E z z R z D z G z Φ==+ (5-5)显然 )(1)(z z e Φ-=Φ(5-6)由式(5-4)可以求出数字控制器的脉冲传递函数为:)](1)[()()(z z G z z D Φ-Φ= (5-7)如果已知被控对象的传递函数G 0(s),并且可以根据控制系统的性能指标确定闭环系统的脉冲传递函数φ(z),由上式可以得到离散化⽅法设计数字控制器的步骤:(1)根据式(5-2)求出⼴义被控对象的脉冲传递函数G(z)。
数字控制系统的基本原理与设计方法数字控制系统(Digital Control System)是一种通过数字处理器来实现系统控制的技术。
它可以对运动、压力、温度等物理量进行精确的测量和控制,具有精准性高、稳定性好、适应性强等优点。
本文将介绍数字控制系统的基本原理和设计方法。
一、数字控制系统的基本原理数字控制系统的基本原理是将输入量(Input)通过传感器采集后,经过模数转换器(A/D Converter)转换为数字量,然后经过数字信号处理器(DSP)进行运算和控制处理,最后通过数模转换器(D/A Converter)将控制信号转换为模拟量输出,从而实现对被控物理量的精确控制。
在数字控制系统中,传感器起到了关键作用。
传感器能够将被测量的物理量转换为电信号,例如压力传感器、温度传感器等。
这些传感器的输出信号需要经过模数转换器将其转换为数字信号,以便数字信号处理器进行处理。
数字信号处理器是数字控制系统的核心部件,它能够对输入信号进行滤波、运算、控制等处理。
通过数字信号处理器,可以实现对控制系统的闭环控制,将被控对象的实际输出与期望输出进行比较,进而调整控制信号,使系统输出达到预期。
二、数字控制系统的设计方法1. 系统建模与参数估计在设计数字控制系统之前,需要对被控对象进行建模和参数估计。
通过数学模型可以描述被控对象的动态特性,参数估计可以获得模型参数的数值。
常用的建模方法有传递函数、状态空间法等。
2. 控制器设计控制器是数字控制系统的关键组成部分,它的设计直接影响控制系统的性能。
常用的控制器设计方法有比例-积分-微分(PID)控制器、模糊逻辑控制器、自适应控制器等。
在设计控制器时,需要考虑到系统的稳定性、快速响应、抗干扰能力等因素。
3. 信号采样与重构在数字控制系统中,输入信号需要进行采样和重构。
采样是指将连续时间信号转换为离散时间信号,常用的采样方法有脉冲采样、均匀采样等。
重构是指通过采样得到的离散时间信号,再恢复为连续时间信号。