基于PID模糊免疫的永磁同步电机调速系统
- 格式:pdf
- 大小:198.20 KB
- 文档页数:4
基于模糊PID控制的永磁同步电动机控制系统设计与仿真分析1 引言永磁同步电机(PMSM)具有强耦合、参数时变、非线性等特点,且系统运行时受到不同程度的干扰,因此很难满足现代工业对高性能PMSM伺服系统的控制要求,尤其在精度、可靠性等性能上。
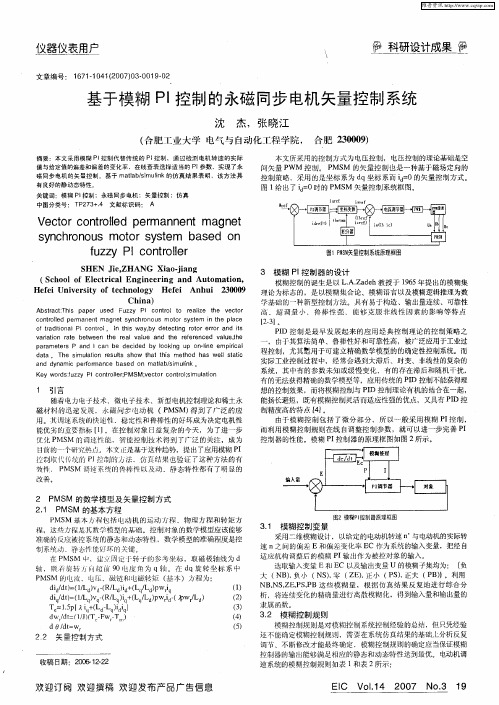
PMSM伺服系统是一个包含电流(转矩)环、速度环和位置环的三闭环控制系统。
采用矢量控制可改善系统内部电流(转矩)环的性能囝。
位置环和速度环实现系统的精确定位和对输入信号的快速跟踪。
速度控制器研究较多的控制策略有神经网络控制、滑模变结构控制、多种控制策略的复合控制等。
其算法都比较复杂,不利于电机数字化控制的实时性。
模糊控制采用以系统误差和误差变化为输入语句变量的二维模糊控制器结构形式,能够处理受控对象的不确定特性,具有实现方法简易、运算快速、实时性强等特点,系统能够获得良好的动态特性.但静态特性不能令人满意。
将模糊控制与PID控制相结合,设计模糊PID速度控制器,使系统既具有模糊控制灵活而适应性强的优点,又具有PID控制精度高的特点。
系统仿真及实验结果表明该控制策略具有良好的控制效果。
2 模糊PID控制器的设计2.1 控制器结构设计应用于速度环的模糊PID控制器采用广泛应用的二维模糊控制器,其一个输入变量是电机输出转速反馈值与给定转速间的误差E。
另一个输入变量是转速误差的变化率EC,即单位时间内转速误差的差值。
输出端设计为多输出,由于模糊PID控制器是在传统PID 控制的基础上加入了模糊控制,故只需在传统PID调节参数的基础上稍作修正即可,于是取传统PID控制器的3个参数P,I,D的修正值△Kp,△Ki;△Kd作为模糊控制器的输出。
2.2 确定隶属度函数记E,EC,△Kp,△Ki,△Kd的模糊变量为e,ec,kp,ki,kdo如模糊子集为(NB(负大),NM(负中),NS(负小),ZO(零),PS(正小),PM(正中),PB(正大)}。
选择输入量e,ec隶属度函数为高斯型。

基于前馈补偿的模糊PI永磁同步电机调速系统邹敏;文定都;何宗卿;吴洪涛;胡正国【摘要】针对永磁同步电机在负载突变或受干扰时存在鲁棒性差、抗干扰性能不足等问题,提出一种基于前馈补偿的永磁同步电机模糊PI控制调速系统.此系统将电机联结轴的摩擦力、负载所需要的力矩以及负载惯量所产生的力作为总扰动,建立扰动前馈模块,将总扰动辨识出来,并且补偿到速度环上,可以很好地解决在电机负载变化时,电机的响应速度无法跟上系统的问题.对比模型的仿真结果表明,基于前馈补偿的模糊PI永磁同步调速系统具有较好的抗干扰性能和鲁棒性.【期刊名称】《湖南工业大学学报》【年(卷),期】2019(033)003【总页数】6页(P35-40)【关键词】永磁同步电机;模糊PI;调速系统;前馈补偿【作者】邹敏;文定都;何宗卿;吴洪涛;胡正国【作者单位】湖南工业大学电气与信息工程学院,湖南株洲 412007;湖南工业大学电气与信息工程学院,湖南株洲 412007;湖南工业大学电气与信息工程学院,湖南株洲 412007;湖南工业大学电气与信息工程学院,湖南株洲 412007;湖南工业大学电气与信息工程学院,湖南株洲 412007【正文语种】中文【中图分类】TM3511 研究背景永磁同步电机(permanent magnet synchronous motor,PMSM)的主要特点为电机的内部构造简单、运行可靠、转矩脉动小、效率高,拥有多种控制方案,便于设计多样化与最优化[1-2]。
因此,在较多领域中,永磁电机的调速系统一直是研究的焦点。
但因PMSM为多变量、非线性、强耦合系统,易受电机参数变化和负载扰动等不确定因素的影响[3-4],且PMSM在工程应用中存在闭环控制策略不完善、抗扰动性能不高和控制器参数无法自适应调节等问题,特别是运行过程中负载发生变化时,控制器的相关系数要及时调整,而系统对于扰动所作出的控制器参数调整需要时间,因此系统不能及时响应扰动,导致系统的动态稳定性能不足[5-6]。
本科毕业论文(设计)题目(中文):基于智能积分模糊控制的永磁同步电机调速控制(英文):Speed control of permanent magnet synchronousmotor control based on fuzzy intelligentintegral学院年级专业学生姓名学号指导教师完成日期 2015 年 4 月上海师范大学本科毕业论文(设计)诚信声明本人郑重声明:所呈交的毕业论文(设计),题目《基于智能积分模糊控制策略的永磁同步电机调速控制》是本人在指导教师的指导下,进行研究工作所取得的成果。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式注明。
除此之外,本论文(设计)不包含任何其他个人或集体已经发表或撰写过的作品成果。
本人完全意识到本声明应承担的法律责任。
作者签名:日期:年月日上海师范大学毕业论文(设计)指导记录表V摘要由于永磁同步电机的体积小,重量轻,功率因数比其他电机大,结构简单等特点。
在科学技术飞速发展背景下,工农业对于永磁同步电机的依赖性越来越强。
而现代控制技术的不断发展也促进了永磁同步电机性能的提高,所以永磁同步电机调速系统的动、静态性能成为了近年来众多学者研究的热点问题。
本文在介绍永磁同步电机的工作原理基础上,研究电压空间矢量脉宽调制技术,并将其应用于永磁同步电机的调速系统中。
搭建永磁同步电机在不同坐标系下的数学模型和矢量调速系统,并用Matlab进行仿真。
引入模糊控制与智能积分策略控制电机转速,并将各项数据同传统PI控制进行对比,分析其优缺点。
本文中,选用id=0的矢量控制方法,使用Matlab软件构建了转速电流双闭环矢量调速系统并进行仿真。
建立基于模糊控制策略的永磁同步电机调速系统的控制器模型,并且在模糊控制的基础上加入智能积分控制,使电机调速系统更加高效和节能。
通过与常规PI控制器相比,分析两种控制器性能的优缺点。
模糊控制策略需要的调节时间要比PI控制短,转速降落较短,抗扰性和鲁棒性均比PI控制强,但响应速度较慢。
2007年 4 月电工技术学报Vol.22 No.4 第22卷第4期TRANSACTIONS OF CHINA ELECTROTECHNICAL SOCIETY Apr. 2007永磁直线同步电机进给系统模糊PID控制陆华才 徐月同 杨伟民 陈子辰(浙江大学现代制造工程研究所杭州 310027)摘要针对永磁直线同步电机(PMLSM)永磁体磁链为常数的特点,对其d-q轴模型进行分析,提出了永磁直线同步电机进给系统的动力学方程。
结合传统PID控制和模糊控制的优点,根据永磁直线同步电机直接进给系统的非线性和可能的不确定性因素,建立PID参数自调整的推理规则,设计了永磁直线同步电机进给系统的模糊PID控制器。
仿真和实验结果表明,模糊PID控制器与传统PID控制器相比具有更好的动态稳定性和跟踪性能,对外界干扰具有较强的鲁棒性。
关键词:永磁直线同步电机模糊PID控制模糊推理鲁棒性中图分类号:TP13;TP271+.4Fuzzy PID Controller Design for a Permanent MagnetLinear Synchronous Motor Feeding SystemLu Huacai Xu Yuetong Yang Weimin Chen Zichen(Zhejiang University Hangzhou 310027 China)Abstract Considering the characteristic of the magnet flux of permanent magnet linear synchronous motors (PMLSM) to be constant, the dynamic equation of the PMLSM feeding system is obtained by analyzing PMLSM d-q model. A fuzzy PID controller is designed by combined fuzzy control with conventional PID control. Fuzzy inference rule of PID parameters is designed according to nonlinear and uncertainty of the PMLSM feeding system. Simulation and experiment results show that the fuzzy PID controller is superior to the conventional PID controller in dynamic stability performance and speed tracking power, and the fuzzy PID controller has strong robustness to external disturbance.Keywords:PMLSM, fuzzy PID control, fuzzy logical inference, robustness1引言由直线电机构成的直接驱动系统取消了从电机到工作台之间的一切中间传动环节,把进给传动链的长度缩短为零,与传统的“旋转电机+滚珠丝杠副”构成的直线运动相比,在精度、快速性、耐久性等方面具有明显的优势。
基于模糊PID控制的开关磁阻电动机调速系统的建模与仿真丛望米芳芳(哈尔滨工程大学自动化学院,哈尔滨 150001)摘要:基于开关磁阻电动机非线性电感模型,在MATLAB7.2/Simulink环境下,建立了四相(8/6极)的开关磁阻电动机调速系统的动态仿真模型。
单纯采用PID控制或简单的PD模糊控制得不到良好的控制性能。
采用模糊PID复合控制,可以充分利用模糊控制和PID控制的优点,最终达到提高SR电机调速性能的目的。
关键词:开关磁阻电机非线性模型模糊PID控制仿真中国分类号: TP273文献标示码:A 文章编号:1003-4862(2008)01-0039-04Modeling and Simulation of Switched Reluctance Drive Basedon Fuzzy-PID ControlCong Wang, Mi Fangfang(College of Automation, Harbin Engineering University,Harbin,150001,China)Abstract: Based on the nonlinear inductance model, a dynamic simulation model for switched reluctance drive is established in the MATLAB7.2/Simulink environment. By using either PID control or simple PD fuzzy control, good control performance could not be gotten. Using fuzzy PID control, the performance of SR motor speed control is improved with full advantages of both fuzzy and PID control.Keywords:SRM; Nonliner model; Fuzzy-PID control; Simulation1 引言模糊控制是一种典型的智能控制方法,在调速控制应用中,对系统参数非线性变化有较强的适应性。