永磁同步电机控制系统研究
- 格式:doc
- 大小:27.50 KB
- 文档页数:4
永磁同步电机的模型预测控制研究一、本文概述随着能源危机和环境污染问题的日益严重,节能和环保已成为当今工业界和学术界的研究热点。
永磁同步电机(PMSM)作为一种高效、节能的电机类型,在电动汽车、风力发电、工业自动化等领域得到了广泛应用。
然而,永磁同步电机的控制问题一直是其应用的难点和关键。
因此,研究永磁同步电机的模型预测控制具有重要的理论价值和实际应用意义。
本文旨在研究永磁同步电机的模型预测控制方法。
本文将对永磁同步电机的数学模型进行深入分析,建立其精确的数学模型。
在此基础上,研究模型预测控制的基本原理和算法流程,并针对永磁同步电机的特点,设计适合其控制的模型预测控制器。
接着,通过仿真和实验验证所设计的模型预测控制器的有效性和优越性。
对永磁同步电机的模型预测控制方法的应用前景进行总结和展望。
本文的研究内容不仅对永磁同步电机的控制理论有重要贡献,同时也为永磁同步电机的实际应用提供了有力支持。
通过本文的研究,期望能够为永磁同步电机的模型预测控制提供新的思路和方法,推动其在更多领域的应用和发展。
二、永磁同步电机的基本理论永磁同步电机(PMSM)是一种利用永磁体产生磁场,通过电磁相互作用实现电能与机械能转换的装置。
其基本理论主要涵盖电机的工作原理、数学模型以及控制策略等方面。
从工作原理来看,PMSM的运行依赖于定子绕组通电产生的电磁场与永磁体产生的磁场之间的相互作用。
当定子绕组通电后,形成旋转磁场,该磁场与转子上的永磁体磁场相互作用,产生转矩,从而驱动电机旋转。
在数学模型方面,PMSM通常采用dq轴模型进行分析。
dq轴模型将电机的三相坐标系转换为两相旋转坐标系,其中d轴与永磁体磁场方向一致,q轴与d轴垂直。
在此模型下,电机的电磁关系、动态性能等可以通过数学方程进行描述,为后续的控制器设计提供了理论基础。
控制策略方面,PMSM的控制目标主要是实现电机的高效、稳定运行以及精确的速度和位置控制。
常见的控制策略包括矢量控制、直接转矩控制以及模型预测控制等。
《永磁同步电机全速度范围无位置传感器控制技术的研究与实现》篇一一、引言永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)是一种重要的电动传动系统部件,因其具有高效率、高功率密度和良好的调速性能等优点,被广泛应用于工业、汽车、航空航天等领域。
然而,传统的PMSM控制系统通常需要使用位置传感器来获取电机的位置信息,这不仅增加了系统的复杂性和成本,还可能降低系统的可靠性和稳定性。
因此,无位置传感器控制技术成为了近年来研究的热点。
本文旨在研究并实现永磁同步电机全速度范围无位置传感器控制技术,以提高电机控制系统的性能和可靠性。
二、永磁同步电机基本原理永磁同步电机的基本原理是利用永磁体产生的磁场与定子电流产生的磁场相互作用,产生转矩,使电机转动。
PMSM的转子不需要外部供电,具有结构简单、运行可靠等优点。
然而,要实现电机的精确控制,必须准确获取电机的位置和速度信息。
传统的PMSM控制系统通过位置传感器来获取这些信息,但无位置传感器控制技术则通过电机内部的电气信号来估算电机的位置和速度。
三、无位置传感器控制技术无位置传感器控制技术主要通过电机内部的电气信号来估算电机的位置和速度。
常见的无位置传感器控制技术包括基于反电动势法、模型参考自适应法、滑模观测器法等。
本文采用基于反电动势法的无位置传感器控制技术,通过检测电机的反电动势来估算电机的位置和速度。
四、全速度范围无位置传感器控制策略为了实现永磁同步电机全速度范围的无位置传感器控制,需要采用合适的控制策略。
本文采用基于矢量控制的策略,通过实时调整电机的电压和电流来控制电机的位置和速度。
在低速阶段,采用初始位置估算和误差补偿技术来提高位置的估算精度;在高速阶段,则采用反电动势法来准确估算电机的位置和速度。
此外,还采用了自适应控制技术来应对电机参数变化和外部干扰的影响。
五、实验与结果分析为了验证本文所提出的无位置传感器控制技术的有效性,进行了实验验证。
永磁同步电机无位置传感器控制技术研究综述永磁同步电机是一种应用广泛的电动机,具有体积小、重量轻、效率高等优点,因此在工业生产中被广泛应用。
传统的永磁同步电机控制技术需要使用位置传感器来获取转子位置信息,以实现精准控制。
随着传感器技术的不断发展和成本的不断下降,无位置传感器控制技术逐渐成为了研究的热点之一。
本文将对永磁同步电机无位置传感器控制技术进行综述,从原理、应用、优缺点等方面进行详细介绍和分析,以期为相关领域的研究和应用提供参考和借鉴。
一、无位置传感器控制技术的原理传统的永磁同步电机控制技术需要通过位置传感器来获取转子位置信息,以实现精准的控制。
位置传感器不仅增加了系统成本,还会增加系统的故障率和维护成本。
研究人员开始尝试利用电机本身和其他信号来实现无位置传感器控制技术。
无位置传感器控制技术的原理主要是通过计算电机的反电动势和电流信息,从而实现对电机转子位置的估计。
通常采用的方法有基于模型的方法和基于传感器融合的方法。
基于模型的方法主要是利用电机的数学模型,通过对电流、电压等信息的测量和计算,来进行转子位置的估计;而基于传感器融合的方法则是利用多种传感器的信息融合来实现位置的估计。
无位置传感器控制技术在很多领域都有着广泛的应用,特别是在一些对成本和可靠性要求较高的场合。
比如在电动汽车、风力发电、工业生产等领域,都可以看到无位置传感器控制技术的应用。
由于无位置传感器控制技术可以减少系统成本、提高系统可靠性,因此受到了广泛的关注和应用。
无位置传感器控制技术相比传统的位置传感器控制技术具有一些明显的优点,如可以降低系统成本、提高系统可靠性、减少维护成本等。
也存在一些缺点,如对控制算法和系统稳定性要求较高、对电机参数变化敏感等。
在实际应用中需要根据具体的情况进行权衡和选择。
尽管无位置传感器控制技术在现实应用中具有广阔的前景,但也面临着一些挑战,如精准的位置估计、控制算法的设计、系统稳定性等问题。
未来研究方向主要包括改进位置估计算法、优化控制策略、提高系统稳定性等方面。
《具有扭矩反馈的永磁同步电机驱动控制器的开发与研究》篇一一、引言随着现代工业自动化和智能化的发展,永磁同步电机(PMSM)因其高效、节能、稳定等优点,在工业生产、新能源汽车、航空航天等领域得到了广泛应用。
然而,为了满足日益严格的性能要求,开发一种具有扭矩反馈的永磁同步电机驱动控制器显得尤为重要。
本文旨在研究和开发具有扭矩反馈的永磁同步电机驱动控制器,以提高电机的控制精度和动态性能。
二、永磁同步电机概述永磁同步电机是一种利用永磁体产生磁场的电机,其转子无需电流激励,具有结构简单、效率高等优点。
然而,由于电机参数的时变性和非线性,传统控制方法难以实现精确控制。
因此,开发一种能够实时获取并反馈电机扭矩的驱动控制器成为提高PMSM性能的关键。
三、扭矩反馈系统设计(一)硬件设计扭矩反馈系统的硬件部分主要包括传感器、数据采集电路和控制器。
传感器用于实时检测电机的扭矩和转速,数据采集电路将传感器信号进行放大、滤波和数字化处理,以便控制器进行后续处理。
控制器采用高性能数字信号处理器(DSP),实现对电机扭矩的实时计算和反馈。
(二)软件设计软件部分主要包括信号处理、扭矩计算、控制算法和通信协议等。
信号处理模块对传感器数据进行预处理,提取有用的信息。
扭矩计算模块根据电机的电气参数和传感器数据,实时计算电机的扭矩。
控制算法模块采用先进的控制策略,如矢量控制、直接转矩控制等,实现对电机的精确控制。
通信协议模块负责与上位机进行数据交互,实现远程监控和调试。
四、扭矩反馈控制策略研究(一)矢量控制策略矢量控制是一种先进的电机控制策略,通过实时计算电机的电压和电流矢量,实现对电机的精确控制。
在具有扭矩反馈的驱动控制器中,矢量控制可以实现对电机扭矩的快速响应和精确控制。
(二)直接转矩控制策略直接转矩控制是一种基于转矩和磁链的电机控制策略,通过对电机的直接转矩进行控制,实现对电机的快速响应和高性能控制。
在具有扭矩反馈的驱动控制器中,直接转矩控制可以进一步提高电机的动态性能和稳定性。
《永磁同步电机全速度范围无位置传感器控制策略研究》篇一一、引言随着现代工业和电动汽车的快速发展,永磁同步电机(PMSM)作为一种高效、节能的电机驱动技术,已得到广泛应用。
然而,传统PMSM控制系统需要依赖位置传感器来实现对电机的精确控制,这不仅增加了系统的复杂性和成本,而且容易受到环境干扰。
因此,无位置传感器控制策略成为了当前研究的热点。
本文旨在研究永磁同步电机全速度范围无位置传感器控制策略,以提高电机控制系统的性能和可靠性。
二、永磁同步电机基本原理永磁同步电机是一种基于磁场同步原理的电机,其转子采用永磁体材料,无需外部电源供电。
当电机通电时,定子产生的磁场与转子永磁体产生的磁场相互作用,使转子以同步速度旋转。
因此,永磁同步电机的控制关键在于如何准确控制定子磁场与转子永磁体磁场之间的相互作用。
三、无位置传感器控制策略研究无位置传感器控制策略主要依赖于电机电流和电压等电气信息来估算电机转子的位置和速度。
在全速度范围内实现无位置传感器控制,需要针对不同速度段采用不同的控制策略。
1. 低速段控制策略在低速段,由于电机反电动势较小,无法通过反电动势估算转子位置。
因此,可采用基于模型的方法或观测器来估算转子位置。
例如,可以采用扩展卡尔曼滤波算法或滑模观测器等方法,根据电机电气信息构建观测模型,实现对转子位置的估算。
2. 中高速段控制策略在中高速段,电机反电动势逐渐增大,可以通过反电动势估算转子位置。
此时,可采用基于反电动势的控制策略。
通过检测电机定子电压和电流,计算反电动势,进而估算转子位置和速度。
此外,还可以采用模型预测控制、直接转矩控制等先进控制策略,提高电机控制的精度和响应速度。
四、全速度范围控制策略实现为了实现永磁同步电机全速度范围无位置传感器控制,需要将低速段和中高速段的控制策略相结合。
可以采用分段控制的方法,根据电机速度和反电动势的大小,自动切换控制策略。
同时,为了确保控制的稳定性和准确性,还需要对控制系统进行优化和调试。
基于MATLAB永磁同步电动机矢量控制系统的仿真研究永磁同步电动机(Permanent Magnet Synchronous Motor,PMSM)是一种应用广泛的高性能电机。
在工业领域,PMSM通常采用矢量控制方法来实现精确的速度和位置控制。
本文基于MATLAB对PMSM矢量控制系统进行仿真研究,探讨其工作原理及性能。
首先,PMSM的矢量控制系统由控制器、电机和传感器三部分组成。
其中,控制器根据电机的反馈信号和期望输出来计算电机的控制信号。
传感器用于测量电机的转速、位置和电流等参数,反馈给控制器。
通过调节控制信号,控制器可以实现电机的速度和位置控制。
在PMSM的矢量控制系统中,通常采用dq轴矢量控制方法,将三相电流转换为直流参考轴和旋转参考轴的dq坐标系,进而对电机进行控制。
其次,本文利用MATLAB软件对PMSM矢量控制系统进行了仿真实验。
首先,建立了PMSM电机的数学模型,包括电机的动态方程、反电动势方程和电流方程。
然后,在MATLAB环境中编写程序,实现电机模型的数值求解和控制算法的计算。
通过调节控制参数,可以对电机的速度和位置进行精确控制,并实时监测电机的工作状态。
在仿真实验中,通过改变电机的负载情况、工作电压和控制参数等条件,分析了PMSM矢量控制系统的性能。
实验结果表明,当负载增加时,电机的转动惯量增大,控制系统的响应时间变长,但依然可以实现精确的速度和位置控制。
当电机的工作电压增加时,电机的输出功率和转速增大,但也会产生更大的电流和损耗。
当控制参数的比例增益和积分时间常数变化时,系统的稳定性和动态性能均会受到影响,需要进行合理的调节。
总结起来,本文基于MATLAB对PMSM矢量控制系统进行了仿真研究,探讨了其控制原理和性能。
通过仿真实验,可以深入理解PMSM矢量控制系统的工作原理,优化系统的参数和性能,并为实际应用提供参考。
永磁同步电机无速度传感器控制技术研究永磁同步电机是一种高性能、高效率的电机,广泛应用于工业和交通领域。
传统的永磁同步电机控制方法需要使用速度传感器来测量电机转速,但是速度传感器的安装和维护成本较高,且容易受到环境干扰。
因此,研究无速度传感器控制技术对于提高永磁同步电机的控制性能具有重要意义。
无速度传感器控制技术主要通过估计电机的转速和位置来实现控制。
其中,转速估计是无速度传感器控制技术的核心。
常用的转速估计方法有基于反电动势法、模型参考自适应系统法和卡尔曼滤波法等。
基于反电动势法是一种简单且有效的转速估计方法。
该方法通过测量电机相电压和电流,利用电机的反电动势来估计电机的转速。
但是,由于电机参数和负载变化等因素的影响,估计精度有限。
模型参考自适应系统法是一种基于模型参考自适应控制理论的转速估计方法。
该方法通过建立电机的数学模型,利用模型参考自适应控制器来估计电机的转速。
该方法具有较高的估计精度,但是需要较为准确的电机模型,且计算量较大。
卡尔曼滤波法是一种基于状态估计的转速估计方法。
该方法通过建立电机的状态空间模型,利用卡尔曼滤波器来估计电机的转速。
该方法具有较高的估计精度,且对电机和负载的变化具有较好的适应性。
在无速度传感器控制技术的研究中,还需要考虑系统的稳定性和鲁棒性。
稳定性是指系统在受到干扰或参数变化时能够保持稳定的性能。
鲁棒性是指系统对于参数不确定性和外部扰动的鲁棒性。
因此,研究无速度传感器控制技术还需要考虑稳定性分析和鲁棒性设计。
总之,无速度传感器控制技术是永磁同步电机控制领域的研究热点。
通过对转速估计方法的研究和改进,可以实现对永磁同步电机的高精度、高效率控制,提高其在工业和交通领域的应用价值。
永磁同步电机控制系统发展现状及趋势摘要:永磁同步电机具有高功率密度、高效率和高可靠性等优点,在现代工业中应用广泛,相关控制理论得到了长远发展。
基于此,本文总结梳理了永磁同步电机控制系统的发展现状,然后论述了各控制系统的特点,最后展望了基于滑模控制的永磁同步电机控制系统的发展趋势,以期为未来永磁同步电机控制系统的进一步发展提供参考。
关键词:永磁同步电机;控制系统;发展现状;滑模控制;发展趋势引言:自永磁同步电机诞生以来,因其具有一系列优异特性,得到了广泛研究,同时伴随着永磁材料和半导体器件的发展,永磁同步电机获得了长足发展。
同时,随着相关控制理论的发展,永磁同步电机控制系统也随之进化,控制精度越来越高。
因而在现代工业中,永磁同步电机广泛应用于国民经济、航空航天等众多领域,发挥着重要作用。
相应的,随着技术产品的发展,对永磁同步电机的控制精度要求越来越高,故将各种先进控制方法应用的永磁同步电机的研究也不断涌现。
1永磁同步电机发展概况永磁同步电机与其他电动机最大不同之处在于励磁电流是依靠永磁体产生。
因此永磁同步电机具有以下优势[1]:(1)采用永磁材料,高速运行过程中发热少,避免了电机工作时转子发冷却难的问题,同时寿命也得到了提高;(2)永磁同步电机功率更高,可以达到97%左右;(3)永磁同步电机功率密度更高,在较小尺寸下即可实现较高的功率和转矩。
1.1永磁同步电机发展历史永磁同步电机的发展可总结为三个阶段[2]:(1)20世纪六七十年代,这个阶段由于稀土材料未得到充分开发,价格昂贵,导致永磁同步电机成本高昂,仅在航空航天等高要求行业得到应用;(2)20世纪八十年代,随着价格稍低的铅铁硼永磁材料的出现和电子控制技术的逐步成熟,永磁同步电机成本降低,同时控制相对容易实现,因而也逐步应用于民用领域;(3)自20世纪九十年代至今,伴随着永磁材料价格的降低、电力电子技术和微处理器技术的发展,永磁同步电机的驱动系统研发应用也得到了明显发展,应用领域进一步扩大,尤其是近十年,永磁同步电机已经成为国民经济中电机驱动系统的第一选择。
永磁同步电动机PM SM矢量控制系统的研究夏燕兰(南京工业职业技术学院,南京2100146)研究与开发摘要本文根据永磁同步电动机PM SM I钩数学模型,分析了PM SM的矢量控制原理,对PM SM矢量控制系统。
进行了分析和仿真,实验结果证明PM SM矢量控制系统具有优良的动、静态性能。
关键词:PM SM;数学模型;矢量控制R es ear ch of V ect or C ont r ol Sys t em f or PM SMX i d Y anl an(N anj i ng I nst i t ut e of l ndust ry and Technol ogy,N anj i ng210046)A bs t r act A cc or di ng t o t he m at hem at i cal m ode l of PM SM,t he paper i nt r oduces t he pri nc i pl e ofvec t o r C ont r ol f or PM SM,anal yzes and s i m ul at es t he vect or c ont r ol s ys t em of PM SM.The exper i m entr e sul t s s how t he c ont r ol s ys t em of P M SM can achi eve go od dyna m i c and st a t i c per f orm ances.K ey w or ds:per m anent m a gne t s yn chr ono us m ot or;m at he m at i c al m odel;vec t or c ont r oll引言永磁直流无刷电动机因体积小、性能好、结构简单、调节控制方便、调速范围广、动态响应快等特点而得到了越来越广泛的应用,尤其应用在智能机器人、航空航天、精密电子仪器与设备等对电机性能、控制精度要求比较高的领域和场合。
摘 要高速永磁同步电机以其动态性能优异、功率密度和工作效率高等优点逐渐成为高性能控制系统中的核心部件。
实现对电机的有效控制需要高精度的转子信息。
由于传统的机械式传感器获取转子位置信息方法存在安装困难、可靠性和经济性差等问题,因此对高速永磁同步电机无位置传感器控制技术的研究正成为国内外热门的研究方向。
本文首先就课题的研究背景及重要意义进行简要阐述,又对高速永磁同步电机及其无位置传感器控制的发展状况进行简单介绍,并在此基础上列举了几种无位置传感器控制技术的常用估算方法,通过对比与分析选择了工程上易于实现且鲁棒性较好的滑模观测器估算法。
其次在三种不同的坐标系下建立高速永磁同步电机数学模型,并基于模型对高速永磁同步电机的矢量控制理论以及空间矢量脉宽调制技术进行深入研究,从而建立起电机的矢量控制模型,验证了高速永磁同步电机在有位置传感器时采用矢量控制策略的有效性。
然后对滑模变结构的基础理论做了细致的研究,在此基础上,根据滑模观测器的原理建立状态方程,实现电机转子位置及转速信息的实时在线估算,同时引入了低通滤波器,并针对传统型滑模观测器可能会出现的抖振问题采用了饱和函数作为切换函数的改进方法。
同时进行了传统型与改进型的仿真对比,进一步得以验证改进后的滑模观测器具有很好的鲁棒性。
另外为了解决滑模观测器收敛慢、存在相位滞后等问题,在设计滑模控制率的过程中引入了积分项,设计了一种非奇异快速终端滑模观测器,并利用MATLAB/Simulink搭建了整个控制系统的仿真模型,通过对比分析仿真结果验证了非奇异快速终端滑模观测器具有更好的性能。
最后以TMS320F2812主控制器为控制核心,搭建了高速永磁同步电机无传感器控制系统的实验平台,同时完成了软硬件的设计。
关键词:高速永磁同步电机无位置传感器滑模观测器非奇异快速终端滑模观测器AbstractHigh speed permanent magnet synchronous motor (PMSM) has become the core part of high performance control system because of its excellent dynamic performance, high power density and high efficiency. The realization of the effective control of the motor requires high-precision rotor information. In view of the difficulties in installation, reliability and economy of the traditional mechanical sensor to obtain the rotor position information, the research on the sensor-less control technology of high-speed permanent magnet synchronous motor is becoming a hot research direction at home and abroad.In this paper, the research background and significance of the subject are briefly described, and the development of high-speed permanent magnet synchronous motor and its sensor-less control is also briefly introduced. On this basis, several common estimation methods of sensor-less control technology are listed. Through comparison and analysis, the estimation method of sliding mode observer which is easy to realize and has good robustness in engineering is selected.Secondly, the mathematical model of high-speed permanent magnet synchronous motor is established in three different coordinate systems. Based on the model, the vector control theory and space vector PWM technology of high-speed permanent magnet synchronous motor are studied deeply, and the vector control model of the motor is established, which verifies the effectiveness of the vector control strategy when the high-speed permanent magnet synchronous motor has position sensor.Then the basic theory of sliding mode variable structure is studied in detail. On this basis, the state equation is established according to the principle of sliding mode observer, and the real-time online estimation of rotor position and speed information is realized. At the same time, the low-pass filter is introduced, and the saturation function is used as the switching function to improve the chattering problem that may occur in the traditional sliding mode observer. At the same time, the simulation results of traditional observer and improved observer are compared to verify that the improved sliding mode observer has good robustness.In addition, in order to solve the problems of slow convergence and phase lag of the sliding mode observer, an integral term is introduced into the design of the sliding mode control rate, and a non singular fast terminal sliding mode observer is designed. The simulation model of the whole control system is built by MATLAB /Simulink. The simulation results show that the non singular fast terminal sliding mode observer has better performance.Finally, taking TMS320F2812 as the control core, the experiment platform of sensor-less control system of high-speed PMSM is built, and the design of software and hardware is completed.Key words: High speed permanent magnet synchronous motor Position sensor-less Sliding mode observer Nonsingular fast terminal sliding mode observer目 录摘 要 (I)Abstract (II)第1章 绪 论 (1)1.1 课题的研究背景及意义 (1)1.2 课题的国内外发展现状 (2)1.2.1 高速永磁同步电机控制的发展现状 (2)1.2.2 高速永磁同步电机无位置传感器控制的发展现状 (4)1.3 本文研究的主要内容 (7)第2章 高速永磁同步电机的数学模型及矢量控制原理 (8)2.1 矢量控制系统中三种坐标变换 (8)2.1.1 Clark变换 (8)2.1.2 Park变换 (9)2.2高速永磁同步电机在各坐标下的数学模型 (11)2.2.1 高速永磁同步电机在自然三相A、B、C坐标系下的数学模型 (11)2.2.2 高速永磁同步电机同步旋转d-q坐标系下的数学模型 (12)2.2.3 高速永磁同步电机在静止两相α-β坐标系下的数学模型 (13)2.3 空间矢量脉宽调制技术 (13)2.3.1 空间矢量脉宽调制技术的原理 (13)2.3.2 空间矢量调制算法的实现 (16)2.4 高速永磁同步电机的矢量控制 (18)2.5 高速永磁同步电机矢量控制系统的仿真 (20)2.5.1 矢量控制系统仿真模型的建立 (20)2.5.2 仿真结果分析 (22)2.6 本章小结 (24)第3章 基于滑模观测器的高速永磁同步电机无位置传感器控制 (25)3.1 滑模变结构控制的基本原理 (25)3.2 传统型滑模观测器的原理与设计 (27)3.3 改进型滑模观测器的原理与设计 (30)3.4 系统仿真验证 (33)3.4.1 仿真模型的建立 (33)3.4.2 仿真结果分析 (35)3.5 本章小结 (42)第4章 基于非奇异快速终端滑模观测器的高速永磁同步电机无传感器控制 (43)4.1 快速终端滑模控制的理论与奇异性问题 (43)4.1.1 终端滑模控制理论 (43)4.1.2 终端滑模控制的奇异性问题 (44)4.2 二阶非奇异终端滑模控制理论 (45)4.3 非奇异快速终端滑模观测器的设计 (45)4.4 非奇异快速终端滑模观测器鲁棒性研究 (47)4.5 系统仿真验证 (49)4.5.1 仿真模型的建立 (49)4.5.2 仿真结果分析 (49)4.6 本章小结 (53)第5章 系统硬件和软件设计 (55)5.1 硬件设计 (55)5.1.1 整体硬件电路设计 (55)5.1.2 主控制芯片的选择 (56)5.1.3 电源模块 (56)5.1.4 IPM模块及隔离驱动电路 (57)5.1.5 电流与电压检测电路 (58)5.1.6 保护电路 (60)5.2 软件设计 (60)5.2.1 软件开发平台 (60)5.2.2 主程序设计 (61)5.2.3 中断服务程序设计 (63)5.2.4 滑模观测器程序设计 (66)5.3 本章小结 (66)第6章 总结与展望 (67)6.1 总结 (67)6.2 展望 (67)致 谢 (69)参考文献 (70)作者简介 (75)攻读学位期间研究成果 (76)第1章 绪 论1.1 课题的研究背景及意义在电力电子技术及控制技术蓬勃发展的背景下,高速电机及其控制技术也在欣欣向荣地发展,它逐渐成为了国家生产制造以及人民日常生活的重要组成部分[1]。
新型永磁同步电机的控制系统设计的开题报告开题报告:题目:新型永磁同步电机的控制系统设计一、研究背景永磁同步电机是一种新型的电机,具有高效、高功率密度和高动态响应等优点,因此在工业生产和交通运输等领域得到广泛应用。
随着电机技术的不断发展,现代电机控制系统也不断完善,为提高电机的性能和控制精度提供了很好的保障。
目前,永磁同步电机的控制系统已经成为研究的热点之一。
二、研究目的本研究旨在设计一种新型永磁同步电机的控制系统,利用先进的电机控制技术提高电机的性能和运行效率。
具体研究内容包括:永磁同步电机的建模和控制原理分析、控制系统的设计与实现、电机调速性能测试和性能评价等。
三、研究内容1.永磁同步电机的建模和控制原理分析通过对永磁同步电机的结构和工作原理进行分析,建立电机数学模型,推导出电机的动态方程,并研究永磁同步电机的特性参数和控制策略等。
2.控制系统的设计与实现根据电机的特性和控制要求设计相应的电机控制系统,包括控制器的选择、计算控制器参数和设计控制算法等。
通过软件仿真验证控制系统的正确性和可靠性,最终进行硬件实现。
3.电机调速性能测试和性能评价利用实验平台对设计的永磁同步电机控制系统进行实验测试,验证控制系统的调速性能和动态性能。
通过性能测试和性能评价,总结控制系统的优点、不足之处,提出改进措施和未来研究方向。
四、研究意义1.本研究可以为永磁同步电机的应用提供一种高效、可靠的控制系统。
2.本研究可以推动永磁同步电机技术的进一步发展和应用。
3.本研究可以为电机控制领域的研究提供一定的参考价值。
五、研究方法本研究主要采用理论分析、数学建模、控制系统设计和实验测试等方法进行。
六、预期成果1.完成永磁同步电机的数学建模和控制原理分析;2.设计并实现永磁同步电机的控制系统;3.通过实验测试,验证控制系统的性能和可靠性;4.撰写长篇论文,发表相关学术论文;5.可以为电机控制领域的研究提供一定的参考价值。
七、研究进度安排本研究计划于2021年9月开始,预计在2022年6月完成研究论文的初稿。
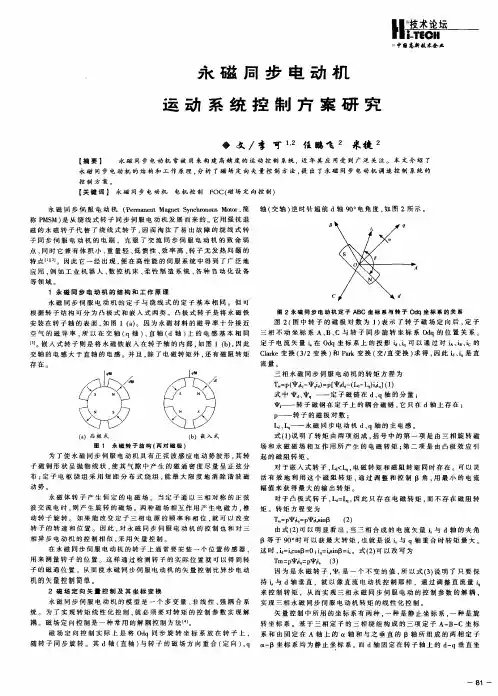
永磁同步电机控制系统研究
【摘要】由于使用场合的特殊性,电梯驱动用电机应该具有振动小、噪声低、
起动电流小、有足够的起动转矩和运行平稳等性能要求。永磁同步电机具有转矩
纹波小,转速平稳,动态响应快速准确,过载能力强等优点,不仅能满足以上要
求,而且可以显著提高功率因数,降低损耗,提高效率,长期运行,可以起到降
本增效的作用。
【关键词】永磁同步电机;电梯驱动;弱磁控制
0.引言
正弦波永磁同步电动机可根据多种矢量控制方法来构成变频调速系统,实现
高性能、高精度的传动,在动态响应要求高的场合其应用前景尤其看好。永磁同
步电机的矢量控制,也是基于磁场定向的控制策略,由于转子上的永磁体所提供
的磁场恒定,加之其结构和参数各异,相应的控制方法也有所不同。这些控制方
法主要有:id=0(转子磁链定向)控制、cosφ=1控制、总磁链恒定控制、最大转矩
/电流控制、最大输出功率控制、直接转矩控制等。它们各具特点,如cosφ=1控
制可以降低与之匹配的变频器容量,恒磁链控制可以增大电动机的最大输出转矩
等。而id=0控制最为简单,它的基本思想是通过控制逆变器使三相定子的合成
电流(磁动势)超前转子位置90°(电角度),则电机的电磁转矩只和定子电流幅值成
正比,即控制定子电流的幅值,就能很好地控制电磁转矩。本文采用id=0与弱
磁控制相结合的控制方式。
1.控制原理
1.1PMSM数学模型
永磁同步电机具有正弦形的反电动势波形,其定子电压、电流也应为正弦波。
假设电动机是线形的,参数不随温度等变化,忽略磁滞/涡流损耗,转子无阻尼
绕组,那么基于转子坐标系(d-q轴系)中的永磁同步电动机定子磁链方程为:
Ψ=Li+Ψ
Ψ=L·i
式中:Ψ为转子磁钢在定子上的耦合磁链;L、L为永磁同步电动机的直、
交轴主电感;i、i为定子电流矢量的直、交轴分量。
PMSM定子电压方程:
u=ri+pΨ-ωΨ
u=ri+pΨ-ωΨ
式中:u,u为定子电压矢量us的d、q轴分量;ω为转子角频率。
PMSM转矩方程:
T=p(Ψi-Ψi)=p[Ψi+(L-L)ii]
从上式可以看出,永磁同步电机的电磁转矩基本上取决于定子交轴电流分量
和直轴电流分量,在永磁同步电动机中,由于转子磁链恒定不变,故采用转子磁
链定向的方式来控制永磁同步电机。
1.2控制方式
在基频以上恒转矩运行区中,采用转子磁链定向的PMSM矢量图如图2所
示。定子电流矢量位于q轴,无d轴分量,即定子电流全部用来产生转矩,此时
PMSM的电压方程可以写成:
u=-ωLi 2.控制系统 IF |Nref-Nfed|≥1/2Nref 【参考文献】 [2]田淳,胡育文.永磁同步电机直接转矩控制系统理论及控制方案的研 [5]尹华杰.“弱磁”型永磁同步电机参数与调速特性的关系研究[J].电工技 注:“本文中所涉及到的图表、公式、注解等请以PDF格式阅读”
u=ri+Lpi+ωΨ
电磁转矩方程为:
T=pΨi
此种控制方式最为简单,只要能准确地检测出转子空间位置(d轴),通过控
制逆变器使三相定子合成电流幅值位于q轴上,就能很好地控制电磁转矩。在基
速以上,永磁同步电机也可以运行在恒功率区,采用定子弱磁的方法。i和Ψ方
向相反,起去磁作用。所谓弱磁控制是一种等效的弱磁,在PMSM中并没有磁
场绕组,转子磁场是由永磁体产生的,不能直接被减弱,该方法是通过加强电机
的直轴电枢反应,削弱气隙磁场,制造一个等效的发电机电势,它的方向与电机
反电势的方向相反,平衡一部分由于转速升高造成的反电势升高,使得定子回路
中的合成电势不超过电压极限。在额定电流下,恒转矩控制方式所能达到的最高
速度ωc由UN确定,ωc是恒转矩控制方式与输入为额定容量恒转矩调速性能的
优劣。研究表明,xdxq类的大,因而在其他参数相同的情况下,前者具有更宽
的恒转矩调速范围。因此在本系统中选用xd
控制系统可以分成两部分,虚线框内部分为控制系统的硬件,其余部分为控
制系统的软件部分。控制系统的硬件包括逆变器驱动电路、智能功率模块、变频
器主回路、三相电流采样电路、过流故障保护电路设计、同步电机位置与速度反
馈电路、15kW永磁同步电机、TMS320F240DSP芯片。控制系统的软件包括同
步电机位置、速度反馈信号的处理、三相电流采样信号的处理及坐标系统的变换
(包括Park、Clark变换)、速度和电流双闭环的PI调节、逆变器驱动信号的形成。
以PI调节为例:从经典控制理论中我们知道,如果要提高系统的动态性能如:
调节时间Ts、上升时间等,可以适当地提高比例系数、积分时间常数。若要提
高系统的静态性能如:超调量、静态误差等,则可以适当地降低比例系数、积分
时间常数。因此在调节PI参数时,系统的动态性能和静态性能是相互矛盾的。
基于这种情况,本文提出了分段变参数的PI调节思想,它在应用中有效地缓解
了系统的动态性能和静态性能的矛盾。其方法如下:
THENKp=0.6Ki=0.01;
IF 1/10Nref≤|Nref-Nred|<1/2Nref
THENKp=0.6Ki=0.005;
IF 1/10Nref≤|Nref-Nfed|<1/10Nref
THENKp=0.3Ki=0.0003
3.结语与展望
本文介绍了永磁同步电机在电梯驱动系统中的应用。首先给出数学模型,在
此基础上分析了控制策略。在实际应用中,采用id=0与弱磁结合的控制方式进
行控制。这种控制方式具有良好的动静态特性,满足了系统的要求,在实践中取
得良好的效果。从理论分析以及实验数据可以看到,通过选择合适的电机参数与
合理的控制方式,系统实现了恒转矩控制和恒功率控制,具有较好的静动态特性,
在实际应用中取得成功,为电梯驱动用电机的理论研究和实践作出一定贡献。如
何进一步提高控制性能,工作展望如下:(1)逐步提高速度和位置测量的精确性
和快速性,这样可以提高有效地提高速度控制的稳态精度。硬件上进一步提高电
流和电压信号的抗干扰能力,提高电流信号的测量精度。这对提高电机的低速闭
环控制意义很大。(2)用智能或者自适应的PI调节器提高电机控制的动态相应速
度。(3)进一步分析永磁同步电机弱磁控制的控制原理和方法,提高弱磁控制在
闭环应用中的稳定性。(4)进一步分析研究各种控制策略的优劣,提高电机控制
的综合性能。
[1]张宏杰.混合励磁永磁同步发电机的原理与设计[J].电工电能新技术,
2002,21(1):29~32.
究[J].电工技术学报,2002,17(1):7~11.
[3]李志民.张遇杰.同步电动机调速系统[M].北京:机械工业出版社,1996.
[4]马小亮.大功率交-交变频调速及矢量控制技术[M].北京:机械工业出
版社,1996.
术学报,1997,12(1):24~28.