永磁同步电机弱磁控制的控制策略研究
- 格式:docx
- 大小:363.11 KB
- 文档页数:10
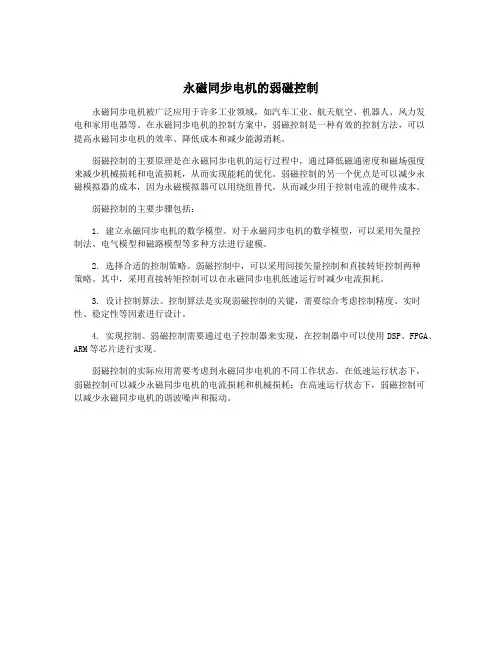
永磁同步电机弱磁与过调制控制策略研究陈亚爱;陈焕玉;周京华;甘时霖【摘要】在前入研究的基础上,提出了一种提升永磁同步电机(PMSM)高速带载能力的控制策略.该控制策略能克服电机在最高转速时无法带载的弱点,可靠性高、易于实现.实现该控制策略的算法包含PMSM的弱磁控制和电压空间矢量的过调制控制,使电机能宽范围带载调速.为验证该控制策略,建立了内置式永磁同步电机(IPMSM)的仿真模型,搭建了试验平台,并进行了仿真和试验研究,验证了该控制策略的可行性和有效性.%On the basis of previous research,the control strategy of permanent magnet synchronous motor (PMSM) with high speed of load capacity was promoted,and the control strategy could overcome the weakness that the motor at the highest speed could not be loaded,high reliability and easy to implement.The algorithm of the control strategy includes the weak magnetic control of PMSM and the over modulation control of voltage space vector,so that the motor could be controlled in a wide range of speed.In order to verify the control strategy,the simulation model of interior permanent magnet synchronous motor (IPMSM) was built,the experimental platform was built,the simulation and experiment were carried out,and the feasibility and effectiveness of the control strategy were verified by simulation and experiment.【期刊名称】《电机与控制应用》【年(卷),期】2017(044)011【总页数】7页(P26-31,37)【关键词】永磁同步电机;弱磁控制;过调制;控制策略;宽范围带载调速【作者】陈亚爱;陈焕玉;周京华;甘时霖【作者单位】北方工业大学电力电子与电气传动工程中心,北京 100144;北京纵横机电技术开发公司,北京 100081;北方工业大学电力电子与电气传动工程中心,北京100144;国家电网北京市电力公司顺义供电公司,北京 101004【正文语种】中文【中图分类】TM351永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)转子安装方式可分为表贴式和内置式。
Feb. 2021Vdl.2& No.22021年2月 第28卷第2期控制工程Control Engineering of China文章编号:1671・7848(2021)02・0327・08DOI: 10.14107/j .cnki.kzgc.20190341永磁同步电机单电流调节器弱磁控制策略优化石讯1,易映萍 >,石伟2(1.上海理工大学机械工程学院,上海200093; 2.许继集团有限公司,河南许昌461000)摘要:针对电压角度法单电流调节器弱磁控制策略带来的内环稳定性下降问题,采用小 信号模型法推导了使用该控制策略时电机的传递函数,证明了控制系统本质上是一个非最 小相位系统。
针对使用该控制竟略时内置式电机参数特性导致的开环极点接近虚轴的问题,提出采用PD 控制器前馈补偿策略。
针对电机弱磁控制过程中极点改变导致传统PID 控制器参数整定不合理的问题,基于内模控制原理,提出采用变参数PID 控制器的弱磁控制罠略。
仿真与实验结果表明,所提出的方法可以有效提高使用电压角度法单电流调节器 弱磁控制罠略时电流内环的稳定性。
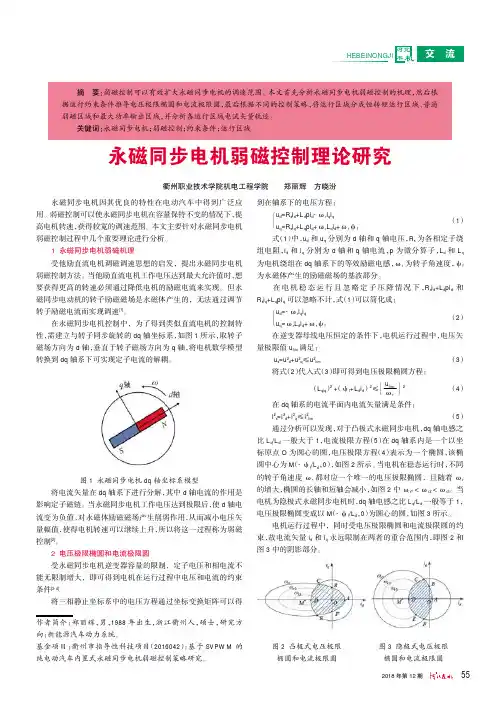
关键词:永磁同步电机;单电流调节器弱磁控制策略;电压角度法;非最小相位系统;变 参数PID 控制中图分类号:TP29文献标识码:AOptimization of Single Current Regulator Flux-weakening Control Strategy forPermanent Magnet Synchronous MotorSHIXun 1, YI Ying-ping 1, SHI Wei 2(1. School of Mechanical Engineering, University of Shanghai for Science and Technology, Shanghai 200093, China;2. XJ Group Corporation, Xuchang 461000, China)Abstract: Aiming at the problem of decreased stability of the inner loop caused by the voltage angle methodsingle current regulator flux-weakening control strategy, the small signal model method is used to derive thetransfer function of the motor when the control strategy is used, which proves that the control system isessentially a non-minimum phase system. Aiming at the problem that the open-loop pole is close to the virtualaxis caused by the interior motor parameter characteristics when using this control strategy, a PD controllerfeedforward compensation strategy is proposed. Aiming at the problem that the parameter setting of thetraditional PID controller is unreasonable due to the pole change in the motor flux-weakening control process,based on the principle of internal model control, a flux-weakening control strategy using variable parameterPID controller is proposed. Simulation and experimental results show that the proposed method can efifectivelyimprove the stability of the current inner loop when the voltage angle method is used for single currentregulator flux-weakening control strategy.Key words: PMSM; single current regulator flux-weakening control strategy; voltage angle method;non-minimum phase system; variable parameter PID control1引言由于转子永磁体安装位置的不同,内置式永磁同步电机(interior permanent magnet synchronousmotor, EPMSM)相对于表贴式永磁同步电机具有更加稳定的转子机械结构。
基于PR控制器的永磁同步电机弱磁控制研究肖文英;黄守道【摘要】讲述了永磁同步电机( PMSM)的运行原理,根据其数学模型对其弱磁原理进行介绍.传统的永磁同步电机控制通常使用PI调节器的方法,通过一系列坐标变换将交流量转为直流值,并用PI调节器对其进行跟踪,为达到良好效果,常需附加随系统运行温度变换的交叉耦合项和前馈补偿项,使整个控制系统的鲁棒性降低,在额定转速以上比较高的速度运行时其负面影响尤为明显.分析了比例谐振(proportional resonant,PR)控制器特,提出了一种基于PR控制器及转子磁链定向的移相弱磁控制策略.最后用MATLAB进行仿真,结果表明该控制策略具有良好的鲁棒性和动态性能,验证了该方法的正确性.%This paper described the operating principles of permanent magnet synchronous motor, and introduced weakening principle due to its mathematical models. In the traditional control method of permanent magnet synchronous motor, it usually uses PI adjuster, through a series of coordinate transformation exchanging AC signal to dc signal, and does the tracking by PI adjuster, to achieve good results. It often needs additional cross coupling term and a feed-forward compensation changed with system operation temperature, making the robustness of the whole control system reduced. When speed is high above the rated one, its negative influence is especially remarkable. The paper analyzed the proportional resonant (PR) controller features, combined with permanent magnet synchronous motor mathematical model, and presented a control method based on a PR controller and phase-shift flux weakening control strategy. Finally, MATLAB was used tosimulate die model above. Results show the system got good dynamic and static responses, verifying the correctness and feasibility of the proposed method.【期刊名称】《湘潭大学自然科学学报》【年(卷),期】2011(033)004【总页数】5页(P108-112)【关键词】永磁同步电机;PR控制器;转子磁链定向矢量控制【作者】肖文英;黄守道【作者单位】湖南工学院电气与信息工程系,湖南衡阳421002;湖南大学电气与信息工程学院,湖南长沙410082【正文语种】中文【中图分类】TM571近年来,因变频调速的永磁同步电动机(简称PMSM)具有可靠性高、功率因数和效率高等诸多优点获得了广泛研究和应用[1,2],但其转子励磁固定,运行时要求端电压和速度成正比,因而无法运行到较高的转速和在高速下做恒功率运行.针对此问题采用弱磁控制以获得宽广的调速范围,实现高速恒功率运行.永磁同步电动机弱磁控制有多种方案,其中一种为移相弱磁控制方案[3],其思路类似于开关磁阻电机高速运行模式下的超前移相控制,不需要增加过多的驱动器硬件成本,有着广泛的应用前景.PI控制具有算法简单和可靠性高的特点.因此传统PMSM控制系统常采用PI控制器[4,5].因其只能对直流量有良好的跟踪效果,故坐标变换会增多,会使控制算法难于实现,而PI调节器只能对直流量进行跟踪控制,对交流量无法跟踪[6,7].而且,为达到良好效果,常附加了随系统运行温度变换的交叉耦合项和前馈补偿项,使整个控制系统的鲁棒性降低,特别是在额定转速以上的弱磁运行时,因参数的变化,其影响更大.针对此问题,需寻找到其他方法以克服其缺点.研究发现PR 控制器可以直接对交流量实现无差跟踪,省去了过多的坐标变化,使控制算法更为简单,不用考虑交叉耦合项以及前馈补偿项,优化了系统鲁棒性能[8].因此,本文设计了一种基于PR的控制器的控制方法,并将之应用于永磁同步电机系统控制系统中,采用移相弱磁控制策略,减小了控制算法实现难度,提高了控制系统的鲁棒性和稳定性,同时能实现高转速弱磁的稳定控制.1 永磁同步电动机的矢量控制基于永磁同步电机控制原理,不计电动机的铁心饱和、涡流和磁滞损耗、略磁场中所有的空间谐波、参数变化等因素,旋转坐标系d,q轴下PMSM定子磁链方程为:其中:Ld、Lq为PMSM的d,q轴电感;Id、Iq为定子电流矢量的d,q轴电流;ψr 为转子磁链在定子上的耦合磁链.PMSM在d,q轴上的定子电压方程式:其中:Vd是定子电压矢量V的d轴分量;Vq是定子电压矢量V的q轴分量;p是微分算子;ωr是转子旋转角速度.当d轴与转子主磁通方向一致时,且认为旋转坐标系的旋转角频率与转子旋转角频率一致,可得到PMSM转子磁通定向的电压回路方程式为:电磁转矩方程为:其中:P为电机的极对数.基速以下采用转子磁链定向的PMSM定子电流矢量位于q 轴,无d轴分量,即Iq=I,Id=0,则PMSM的电压方程可写为:电磁转矩方程可简化为:由(6)可知,基速以下,控制Iq就能控制转速实现矢量控制.2 永磁同步电动机的弱磁控制原理永磁同步电机的电压方程可写为:从式(7)可以看到,永磁同步电机的转速和电机端电压成正比,因此当电机达到额定转速后,若要维持电机端电压不变而进一步提高转速,只有靠调节id、iq来实现,即弱磁控制,其一般是通过增加直轴去磁电流分量.永磁同步电机的弱磁扩速控制可由如图1所示的定子电流矢量轨迹加以说明.首先,电机恒转矩运行,即沿着最大转矩比电流曲线OA运行.当电机的电压和电流均达到极限值时,此时转速ω1为对应最大转矩TA时电机的转折速度.若要进一步提高转速,比如将其升至ω2,同时最大限度的利用逆变器容量,则需要控制电流矢量沿着电流极限圆,即AB段逆时针向下运行.从图上可以看出,电流矢量从A点运行到B点,直轴去磁电流分量增大了,同时,电机的输出转矩变小了,即恒功率运行.传统的弱磁方式之一为移相角弱磁控制,如图2所示,当电流矢量为is1时,若此时电机对应最大转矩时的转折速度ω1,为了实现弱磁,即增加直轴去磁电流分量,可将is1对应的角度θ1增大到θ2.由图2可知,此时直轴电流去磁分量增大了.为了实现移相弱磁控制,我们需要求出弱磁调节系数,该系数由下式给定:3 基于PR的PMSM弱磁控制策略PR(proportional resonant)控制器,它的传递函数可如下表示其中,Ki是积分时间常数;Kp为比例常数;w0是谐振频率,而且有作其波特图如图3所示.由图3可以看到,在频率点w0处为高增益,因此可以应用于无静差的电流跟踪控制系统中.其原理框图如图4所示.图5 移相弱磁控制系统框图Fig.5 Phase shifting flux weakening control system在上述基础上,在控制系统中引入PR控制器,将能优化系统的响应.基于PR控制器的移相弱磁控制系统框图如图5所示.图5中,实测的调节系数M与设定值M*做差比较后,其差值通过弱磁环的调节输出角度的给定值.当差值大于0时,弱磁环输出的角度值不发生变换;而当差值小于0时,弱磁环输出的角度值增大,即进入弱磁控制,完成了系统从电流id=0控制过渡到弱磁控制,从恒转矩控制过度到恒功率控制.易知,该控制下,省略了受温度影响的电路参数交叉解耦项ωLiq、ωLid和前馈补偿项ωΨr,从而实现了鲁棒性能高的目的.4 仿真结果及其分析利用MATLAB仿真工具箱,对引入PR控制器的PMSM采用移相弱磁方法,研究其系统控制.永磁电机的参数如表1所示.给定转速设置为:初始值n*=2 000r/min,t=0.15 s时突变,为n*=4 000 r/min.且在t=0.72 s时,突加TL=5 N·m.表1 PMSM参数Tab.1 The PMSM parameter定子额定电压/V定子电阻/Ω转子磁链/Wb定子电感Ld/mH电机极对数定子电感Lq /mH 1000.031 860.055 61.2961.29从图6可以看到,转速给定由2 000 r/min突变为4 000 r/min的过程中,实际转速能平滑地过渡,并进入弱磁扩速状态,系统很好地实现了2倍扩速,且在t=0.72 s负载突变时几乎无脉动,这说明了采用PR控制器能获得良好的动静态转速响应.从图7可以看到,t=0.15 s移相弱磁角由开始为0慢慢向负方向增加,这说明了电机此时在移相弱磁控制下开始进入弱磁运行方式.图8描述了在电机启动时、给定的转速突变情况下以及负载突变的条件下电机的电磁转矩的响应情况.可以看到电磁转矩波动非常小,表明了应用上述控制策略情况下控制系统具有良好的动态性能.图9和图10分别为电机定子三相电流及其细节图的波形,在弱磁扩速达到给定值时突加负载瞬间三相电流有些脉动,但很快达到稳定状态,从图10可见其正弦性能良好.图11和图12分别是定子给定电流和实际电流在静止坐标系下的α分量及其细节图.可以看到,其波形几乎重合,可以说明,在PR控制器对正弦电流的跟踪效果非常好,几乎没有什么偏差,可见其实际应用优势.5 结论PR控制器能够对交流量进行无差跟踪,本文据此进行数学建模,并结合永磁同步转子磁链定向原理,采用移相弱磁方法,建立了PMSM弱磁控制系统仿真模型,并分析了仿真结果.系统的静态性能和动态性能均表现良好,验证了该方法的可行性.参考文献[1]曹荣昌.永磁同步电机牵入同步分析[J].湘潭大学自然科学学报,1999(03):97—99.[2]王旭红,汪建平.永磁同步电动机的研制及优化[J].湘潭大学自然科学学报,2002,24(3):96—99.[3]童怀,刘继辉.永磁同步电动机移相弱磁控制的仿真分析[J].微特电机,2006(8):17—20[4]戴朝波,林海雪.电压源型逆变器三角载波电流控制新方法[J].中国电机工程学报,2002,22(2):99—102.[5]姜俊峰,刘会金,陈允平,等.有源滤波器的电压空间矢量双滞环电流控制新方法[J].中国电机工程学报,2004,24(10):82—86.[6]唐欣,罗安,涂春鸣.基于递推积分PI的混合型有源电力滤波器电流控制[J].中国电机工程学报,2003,23(10):38—41.[7]孙强,程明,周鹗,等.新型双凸极永磁电机调速系统的变参数PI控制[J].中国电机工程学报,2003,23(6):117—122.[8] TEODORESCU R,BLAABJERG F,BORUP U,et al.A new control structure for grid-connected LCL PV inverters with zero steady-state error and selective harmonic compensation[J].IEEE Trans on Power Electronics,2004:580—586.。
永磁同步电机的弱磁控制策略的仿真研究收藏此信息添加:顾光旭来源:1 引言目前,弱磁控制是永磁同步电机研究的又一个热点。
由于材料技术的进展,高剩磁密度br 和高矫顽力hc的永磁材料应用于电机,电机在相当大的程度上已不怕电枢反映的去磁作用,允许在直轴上流过较大的去磁电流。
另一方面为了使电机运行于高速区,拓宽电机系统的调速范围。
在电压型逆变器驱动的电机系统中,电机端电压不可能提高的情形下,减弱电机磁场使电机转速升高的方式—弱磁控制,能够使电机运行在额定转速以上。
在很多牵引和纺织驱动应用处合中,需要恒功率控制和宽调速范围运行,因此,电机的弱磁控制日趋倍受关注。
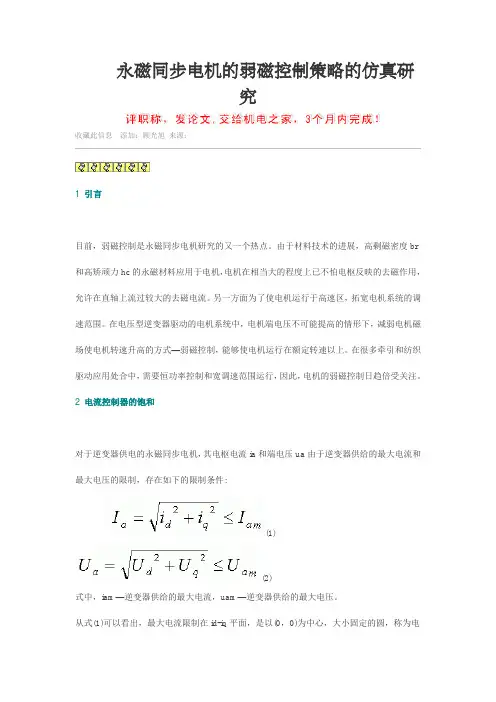
2 电流控制器的饱和对于逆变器供电的永磁同步电机,其电枢电流ia和端电压ua由于逆变器供给的最大电流和最大电压的限制,存在如下的限制条件:(1)(2)式中,iam—逆变器供给的最大电流,uam—逆变器供给的最大电压。
从式(1)可以看出,最大电流限制在id-iq平面,是以(0,0)为中心,大小固定的圆,称为电流极限圆。
最大的电压限制可以用以下方程表示:(3)在id-iq平面上,随着电机转速的提高,最大电压极限是一簇不断缩小,以(-1,0)为中心的椭圆,称为电压极限椭圆。
电流矢量ia必须位于电流极限圆和电压极限椭圆中,否则电枢电流不能跟随给定电流,永磁同步电机的调速性能将下降。
在电机低速运行段,电压极限椭圆较大,电流控制器输出电流能力主要受到电流极限圆的约束,限制了永磁同步电机低速时的输出力矩。
在高速运行段,电压极限椭圆不断缩小,电压极限椭圆成为逆变器输出约束的主要方面,从而限制了永磁同步电机的调速运行范围。
采用弱磁控制可以扩展永磁同步电机的调速范围,在高速段避免电流控制器饱和,即提高高速运行时永磁同步电机矢量控制系统的调速性能。
在永磁同步电机矢量控制系统中,正常转速运行范围内能够采用不同的电流控制策略,采用这些电流控制方法时,随着电机转速的升高,电流控制器很快就会进入饱和。
永磁同步电机控制策略研究及仿真一、本文概述永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)因其高效率、高功率密度、良好的控制性能等特点,在工业、交通、家电等领域得到了广泛应用。
随着电力电子技术和控制理论的发展,对PMSM的控制策略的研究也日益深入,旨在实现电机的高性能、高效率和可靠性。
本文主要针对永磁同步电机的控制策略进行研究和仿真分析。
本文首先对永磁同步电机的基本原理和控制方法进行了综述,包括电机结构、运行原理、数学模型等,为后续控制策略的研究奠定了基础。
详细讨论了几种常见的PMSM控制策略,如矢量控制(Vector Control)、直接转矩控制(Direct Torque Control, DTC)、模型预测控制(Model Predictive Control, MPC)等,分析了各种控制策略的优缺点及其适用场合。
接着,本文针对某特定应用背景,提出了一种改进的PMSM控制策略。
该策略在传统控制方法的基础上,引入了先进的控制算法和优化技术,旨在提高系统的动态性能、稳态性能和抗干扰能力。
本文还通过仿真实验,验证了所提控制策略的有效性和优越性。
二、永磁同步电机基本原理与特点永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)是一种利用永磁体作为磁场源,实现电能与机械能相互转换的装置。
其基本原理基于电磁感应和磁场相互作用,通过控制定子电流产生的磁场与转子永磁体磁场之间的相互作用,实现电机的旋转运动。
高效率:由于使用永磁体作为磁场源,无需额外的励磁电流,因此电机在运行时具有较低的损耗和较高的效率。
高功率密度:永磁体的使用使得电机能够在较小的体积内实现较高的功率输出,适用于需要紧凑设计的应用场景。
良好的调速性能:通过控制定子电流的频率和相位,可以实现对PMSM的精确速度控制,满足宽范围调速的需求。
低维护成本:永磁体通常具有较高的磁能积和稳定性,使得电机在运行过程中无需频繁更换磁极,降低了维护成本。

永磁同步电机弱磁最优控制策略研究GONG Jinbiao;SHI Huoquan【摘要】针对永磁同步电机(PMSM)在恒转矩区起动能力差、在恒功率区电流轨迹不易跟踪等问题,提出基于电压反馈复合电流前馈的定子电流弱磁最优控制策略.通过判断电流前馈环节达到稳定时所需的电流与采用最大转矩电流比(MTPA)算法所得电流大小,使定子电流在恒转矩区通过电流前馈作用快速跟踪MTPA曲线,加快起动;在恒功率区采用电压反馈复合电流前馈的策略,增强系统抗干扰能力的同时最大化直流母线电压利用率.为了验证该策略的可行性,搭建PMSM仿真模型,构建以dSPACE1007为核心的试验平台,对其进行仿真和试验,结果表明了该策略的稳定性和有效性.【期刊名称】《电机与控制应用》【年(卷),期】2019(046)004【总页数】6页(P32-37)【关键词】永磁同步电机;弱磁控制;最大转矩电流比;电压反馈复合电流前馈【作者】GONG Jinbiao;SHI Huoquan【作者单位】【正文语种】中文【中图分类】TM3410 引言内置式永磁同步电机(IPMSM)因其良好的功率密度和工作效率被广泛应用于各种工业场合[1]。
优化的控制策略通过适当控制电流矢量可以实现电机高利用率。
在基速范围内,最大转矩电流比(MTPA)控制策略可以实现铜耗最小化。
在需要宽速度范围运行的应用,比如电动汽车,在弱磁控制策略中利用永磁体励磁,使电机高速稳定地运行在恒功率区[2]。
对IPMSM进行弱磁区控制策略的研究有重要意义。
在传统IPMSM中,不能直接控制磁通量,只能通过去磁效应减弱气隙磁通量d轴电枢反应电流[3]。
通常采用电流前馈、电压反馈或混合弱磁方法扩展永磁同步电机(PMSM)的运行区域。
电压反馈弱磁控制是通过适当的闭环直接控制逆变器输出电压[4]。
文献[5]通过电压反馈研究不同PMSM控制系统在弱磁控制区域的变化,阐释了弱磁控制特性的参数变化以及转矩限制对弱磁控制的影响。
永磁同步电机弱磁控制的控制策略研究摘要永磁同步电机是数控机床、机器人控制等的主要执行元件,随着稀土永磁材料、永磁电机设计制造技术、电力电子技术、微处理器技术的不断发展和进步,永磁同步电机控制技术成为了交流电机控制技术的一个新的发展方向。
基于它的优越性,永磁同步电机获得了广泛的研究和应用.本文对永磁同步电机的弱磁控制策略进行了综述,并着重对电压极限椭圆梯度下降法弱磁控制、采用改进的超前角控制弱磁增速、内置式永磁同步电动机弱磁控制方面进行了调查、研究。
关键词:永磁同步电机、弱磁控制、电压极限椭圆梯度下降法、超前角控制、内置式永磁同步电动机一、永磁同步电机弱磁控制研究现状1.永磁同步电机及其控制技术的发展任何电机的电磁转矩都是由主磁场和电枢磁场相互作用产生的。
直流电机的主磁场和电枢磁场在空间互差90°电角度,因此可以独立调节;而交流电机的主磁场和电枢磁场互不垂直,互相影响。
因此,交流电机的转矩控制性能不佳。
经过长期的研究,目前交流电机的控制方案有:矢量控制、恒压频比控制、直接转矩控制等[1]。
1.1 矢量控制1971年德国西门子公司F.Blaschke等与美国P.C.Custman等几乎同时提出了交流电机磁场定向控制的原理,经过不断的研究与实践,形成了现在获得广泛应用的矢量控制系统。
矢量控制系统是通过坐标变换,把交流电机在按照磁链定向的旋转坐标系上等效成直流电机,从而模仿直流电机进行控制,使交流电机的调速性能达到或超过直流电机的性能。
1.2 恒压频比控制恒压频比控制是一种开环控制,它根据系统的给定,利用空间矢量脉宽调制转化为期望的输出进行控制,使电机以一定的转速运转。
但是它依据电机的稳态模型,从而得不到理想的动态控制性能。
要获得很高的动态性能,必须依据电机的动态数学模型,永磁同步电机的动态数学模型是非线性、多变量,它含有角速度与电流或的乘积项,因此要得到精确控制性能必须对角速度和电流进行解耦。
永磁同步电机的弱磁控制
永磁同步电机被广泛应用于许多工业领域,如汽车工业、航天航空、机器人、风力发
电和家用电器等。
在永磁同步电机的控制方案中,弱磁控制是一种有效的控制方法,可以
提高永磁同步电机的效率、降低成本和减少能源消耗。
弱磁控制的主要原理是在永磁同步电机的运行过程中,通过降低磁通密度和磁场强度
来减少机械损耗和电流损耗,从而实现能耗的优化。
弱磁控制的另一个优点是可以减少永
磁模拟器的成本,因为永磁模拟器可以用绕组替代,从而减少用于控制电流的硬件成本。
弱磁控制的主要步骤包括:
1. 建立永磁同步电机的数学模型。
对于永磁同步电机的数学模型,可以采用矢量控
制法、电气模型和磁路模型等多种方法进行建模。
2. 选择合适的控制策略。
弱磁控制中,可以采用间接矢量控制和直接转矩控制两种
策略。
其中,采用直接转矩控制可以在永磁同步电机低速运行时减少电流损耗。
3. 设计控制算法。
控制算法是实现弱磁控制的关键,需要综合考虑控制精度、实时性、稳定性等因素进行设计。
4. 实现控制。
弱磁控制需要通过电子控制器来实现,在控制器中可以使用DSP、FPGA、ARM等芯片进行实现。
弱磁控制的实际应用需要考虑到永磁同步电机的不同工作状态。
在低速运行状态下,
弱磁控制可以减少永磁同步电机的电流损耗和机械损耗;在高速运行状态下,弱磁控制可
以减少永磁同步电机的谐波噪声和振动。
永磁同步电机直接转矩弱磁控制的研究永磁同步电机直接转矩弱磁控制的研究摘要:永磁同步电机作为一种新型的高效率电机,广泛应用于各个领域。
然而,在一些应用场景下,如机械载荷突变、运行参数的快速变化等,永磁同步电机的直接转矩控制存在一定的局限性。
为解决这个问题,本文针对永磁同步电机直接转矩控制中的转矩控制策略进行了研究和分析。
通过对永磁同步电机工作原理及转矩控制策略进行深入研究,提出了一种基于弱磁模型的转矩控制方法,旨在提高永磁同步电机在快速变化负载的工况下的运行性能。
关键词:永磁同步电机;直接转矩控制;弱磁模型;运行性能第一章引言永磁同步电机作为一种高效率、高功率密度的电机,具有转矩密度大、响应时间短等优点,已被广泛应用于汽车、船舶、风力发电等领域。
然而,在一些特殊的工况下,如机械载荷突变、运行参数的快速变化等,直接转矩控制策略存在转矩跟踪性差、系统不稳定等问题。
因此,研究永磁同步电机直接转矩控制策略,提高其在复杂工况下的运行性能,具有重要的理论和应用价值。
第二章永磁同步电机工作原理2.1 永磁同步电机结构及工作原理2.2 直接转矩控制策略简介2.3 存在的问题及其原因第三章转矩控制策略研究3.1 弱磁模型理论在弱磁模型理论中,通过引入额外的励磁电流,使磁场的强度减小,从而实现转矩控制。
该方法能够有效地应对转矩的突变,提高了系统的鲁棒性和稳定性。
3.2 弱磁模型在直接转矩控制中的应用在直接转矩控制策略中,通过优化弱磁模型的参数,使永磁同步电机在变化负载下有更好的控制效果。
通过实验验证,该方法能够提高永磁同步电机的转矩响应速度和跟踪性能。
第四章实验与结果分析4.1 实验平台及参数设置4.2 弱磁模型的控制效果分析通过对永磁同步电机在不同负载下的实验测试,对比分析了传统直接转矩控制与弱磁模型转矩控制的性能指标,结果显示弱磁模型转矩控制方法在转矩响应时间和跟踪性能上均优于传统方法。
第五章结论与展望通过研究与实验分析,本文提出了一种基于弱磁模型的永磁同步电机直接转矩控制策略。
新的基于内置式永磁同步电机的弱磁控制策略黄守道;徐琼;祁宙;李建业;杜超;郭灯塔【摘要】By combining the field-weakening control principles of interior permanent magnet synchronous motor (IPMSM) with the space vector pulse width modulation (SVPWM), a novel field-weakening control strategy for IPMSM was proposed. The difference between the reference voltage updated by current regulator and the saturated voltage output by SVPWM is used for field-weakening control, which modifies the stator current phase angle. The d and q axis stator reference current component is redistributed, and finally, the speed operation range of IPMSM is extended. With this method, high-time speed field-weakening operation was realized, and the smooth transition of field-weakening stator current and fast response were also guaranteed. Moreover, since the proposed method utilizes the dclink voltage more efficiently, it makes the motor generate higher output torque and has better adaptability in field-weakening operation region than conventional field-weakening control methods under the same voltage and current limitation. The effectiveness of the proposed field-weakening control method was verified with simulation and experimental results.%将内置式永磁同步电机弱磁运行原理与电压空间矢量脉宽调制相结合,提出了一种新的弱磁控制策略.通过用电流调节器输出的参考电压与电压空间矢量脉宽调制后输出的极限电压两者之间的电压差值来改变定子电流相位角,从而重新分配d,q轴给定定子电流分量的大小,最终实现弱磁升速.该控制方法实现了电机高倍弱磁扩速运行,且弱磁电流过渡平滑、响应速度快.与传统弱磁控制方法相比,在弱磁区域能更有效地利用直流母线电压,从而在同样电压和电流限制条件下,电机能产生更高的电磁转矩,适应性更好.仿真和实验结果表明了本文所提弱磁控制策略的有效性和可行性.【期刊名称】《湖南大学学报(自然科学版)》【年(卷),期】2013(040)001【总页数】5页(P55-59)【关键词】空间矢量脉宽调制;内置式永磁同步电机;弱磁控制【作者】黄守道;徐琼;祁宙;李建业;杜超;郭灯塔【作者单位】海上风力发电技术与检测国家重点实验室,湖南湘潭411101【正文语种】中文【中图分类】TM301.2内置式永磁同步电机(Interior Permanent Magnet Synchronous Motor,IPMSM)以高效率、高功率密度和调速范围宽等优点,广泛应用于各种电机驱动系统中,如电动汽车、轨道机车、机器人等领域.在这些应用中,不仅要求较宽的弱磁调速范围,而且要求较强的弱磁性能[1-4].较强的弱磁性能可在逆变器容量不变情况下提高系统性能[1-8].基于弱磁扩速的基本思想,国内外研究者提出了许多用于改善永磁同步电机弱磁性能的控制策略.文献[1]提出了前馈弱磁控制方法,有较好的稳态性能,但易受电机参数及温度变化的影响,鲁棒性差.文献[2-3]提出了直流侧电压环反馈调节方法,鲁棒性好,但逆变器的直流母线电压没有被完全利用.为了最大程度利用母线电压,文献[4]采用六步电压过调制法,然而会产生很大电流谐波,且通过前馈查表法来调节电流,算法复杂.本文阐述了内置式永磁同步电机的弱磁运行原理,分析了传统弱磁控制算法中直流母线电压没有完全利用的不足之处,提出了一种新的弱磁控制策略,通过用SVPWM调制前后输出的电压差值来改变电流相位角从而调节交直轴电流.仿真和实验结果证明该改进算法实现了电机高倍基速以上的稳定运行、弱磁电流过渡平滑,对比传统弱磁算法,在同样条件下,电机在弱磁区域能输出更大电磁转矩.1 IPMSM的弱磁原理内置式永磁同步电机在两相同步旋转d,q坐标系下的稳态电压方程为:电机高速运行时,定子电阻压降较小,可忽略不计,式(1)可以表示为:式中:IPMSM最优控制运行的定子电流变化轨迹如图1所示.基速以下,采用最大转矩电流比(maximum torque per ampere,MTPA)控制可使永磁同步电机获得最大电磁转矩,如图1中OA段.随着转速继续上升,电机运行于A点时电机端电压达到逆变器所提供的极限电压,电机无法继续往高速运行.由式(2)可知,只有通过调节定子电流,即增加直轴电流分量,同时减小交轴电流分量来实现弱磁升速[5-6].为最大限度利用逆变器容量,在弱磁区控制电流矢量沿着电流极限圆逆时针向下旋转,如图1中AC段.图1 IPMSM运行过程定子电流轨迹Fig.1 Trajectory of stator current for IPMSM图2为传统直流侧电压环弱磁控制系统框图[2].当参考电压us*大于usmax时,弱磁控制器通过PI调节器来产生去磁电流进行弱磁升速.这种弱磁控制方法效果良好,在实际应用中比较常见.然而,若给定电压usmax设定为udc/,则此过程中实际输出最大电压矢量轨迹半径为udc/的内切圆,而逆变器所能输出给电机的极限电压为正六边形边界,如图3(a)所示,此时,正六边形与内切圆之间的部分电压没有进行电流控制,即逆变器直流侧母线电压没有完全被利用,弱磁区转矩性能没有最大程度输出.若usmax增加至2udc/π,给定电压超出了正六边形,而实际电压不可能达到超出正六边形的部分区域,此时系统中可能会产生大量谐波甚至系统不稳定[4,7].为此,本文提出一种新的弱磁算法在实现弱磁扩速的同时改善上述弱磁过程中的转矩性能.图2 传统直流侧电压环弱磁系统框图Fig.2 Conventional field-weakening control system for IPMSM2 弱磁控制策略2.1 SVPWM 调制SVPWM原理是逆变器通过6个基本电压矢量的组合,使输出的电压空间矢量轨迹接近电机的实际圆形旋转磁场.电机在基速以下运行时,参考电压u*s较小,处于正六边形内,调制前的参考电压u*s与调制后实际输出电压us相等,两者电压差为零.随着转速升高,电机端电压达到逆变器输出的饱和极限电压,此时参考电压u*s会超出正六边形边界,调制后输出的实际电压us会小于调制前的参考电压u*s,即两者出现差值Δus,如图3(b)所示 .同时采用最小幅值误差过调制[8]的方法来调整参考电压使其落在正六边形内来跟踪实际电压轨迹.基于以上原理可知,电机端电压是否达到逆变器所能输出的极限电压,即是否开始进入弱磁区域可通过SVPWM调制前后的电压差来确定.同时用此电压差值来调节定子电流进行弱磁扩速,其实际输出的最大电压矢量轨迹会落在正六边形上,直流母线电压能得到更有效的利用,使得电机在弱磁区输出更大的电磁转矩.图3 SVPWM电压极限与调制方法Fig.3 SVPWM limits and methods2.2 恒转矩MTPA运行分析IPMSM的电磁转矩方程为:为充分利用定子电流,在恒转矩区域采用MTPA控制,其电流轨迹方程如下[6]:2.3 弱磁运行分析高速时忽略定子电阻压降,电流调节器输出的参考电压与SVPWM调制后输出的实际电压之间的差值在d,q轴坐标系下可分别表示为[7]:定义电压差值的代价函数为:为了最有效地利用逆变器的直流母线电压,以参考电压与实际电压的差值F最小原则来分配弱磁区域内d,q轴给定电流分量的大小.运用梯度下降法原理[9]使得目标函数F的值最小,其表达式为:将式(7)等式两边积分可得:式中:i*d,i*q为恒转矩区域的参考电流;i*dm,i*qm为弱磁区域重新分配的参考电流;β为大于零的常数.从式(8)可以看出,若Δuq或Δud变为零,由于积分作用,i*dm,i*qm不能恢复为i*d,i*q,可用低通滤波器来代替这里的积分器.则表达式为:式中:ωc为低通滤波器截止频率.电机在运行过程中定子电流矢量在d,q轴上的电流分量始终满足以下关系式:从图1中的定子电流矢量轨迹可知,弱磁运行过程中定子电流矢量在d,q轴平面上沿电流极限圆逆时针旋转角度Δθ,有式中:θ为电流相位角;Δθ为定子电流弱磁角.结合式(9)和式(10)可得:电机弱磁运行时工作于图1中第二或第三象限,Δθ在[-π/2,π/2]内变化,由式(12)可见,此时弱磁角Δθ与等式右边变量T成线性变化,又因控制系统具有自调节能力,故可通过控制变量T来直接控制弱磁角Δθ.于是,弱磁角的等效表达式为:式中:ρ=Lq/Ld.当电机处于电动运行状态时,工作于图1中第二象限,α为大于零的常数;当电机处于发电运行状态时,工作于第三象限,α为小于零的常数.本文以电机工作于第二象限为例来讨论其弱磁运行过程,后文对此不再另作说明. 弱磁控制算法框图如图4所示.基速以下,电机端电压未达到逆变器输出的最大电压,SVPWM调制前后的输出电压相等,弱磁角Δθ输出为零,此过程采用MTPA控制获得最大电磁转矩.随着转速继续上升,实际输出电压达到饱和时,参考电压与实际电压之间出现电压差值,弱磁控制器输出弱磁角来改变参考电流i*d与i*q.转速进一步上升至给定转速,系统稳定运行.图4 弱磁控制算法框图Fig.4 Proposed field-weakening control strategy for IPMSM3 仿真与实验结果3.1 仿真结果及分析运用Matlab/Simulink工具箱建立仿真模型,验证本文所述弱磁控制算法的正确性.IPMSM电机参数为:PN=6kW;nN=2 000r/min;rs=0.031 8Ω;Ld=0.612mH;Lq=1.29mH;Ψf=0.063 3Wb;np=6.一阶低通滤波器的截止频率设置为200Hz,参数α设置为5.图5为电机带10N·m负载启动弱磁扩速至6 000r/min的系统仿真变化曲线.从图5可以看出,在0.1s前,弱磁环输出为零,定子矢量角θ恒定,id和iq基本保持恒定,电机运行于 MTPA曲线上.电机进入弱磁区域时,弱磁角Δθ开始输出正值,电流矢量沿图1中曲线AB逆时针旋转,θ逐渐增大,从而id逐渐减小,iq逐渐增大.图5(c)可知,系统稳定前,定子电流幅值i*s保持最大输出70A,额定转速以下,电机保持最大转矩运行,弱磁运行时转矩随电流变化而逐渐下降.整个过渡过程,电流变化快速而平稳,达到稳定时系统各变量无超调地跟随负载变化.3.2 实验结果及分析建立实验系统对本文所提算法进行实验验证.系统采用TI公司的DSP芯片TMS320F2812作为主控器件,PWM载波周期为7.5kHz,直流母线电压为150V,实验电机参数与仿真模型参数相同.图5 弱磁控制过程仿真波形Fig.5 Simulation results operating on the proposed field-weakening control method图6为整个弱磁控制过程各变量实验变化波形.在图6(a)和图6(b)中,d,q轴电流在恒转矩区域保持恒定,电流矢量角θ输出恒定值约为113°,弱磁角无输出.电机转速上升超过额定转速后,弱磁角逐渐增大,高速时弱磁角变化较为缓慢,达到6 000 r/min时约为165°,电机还可以弱磁运行于更高的转速.d,q轴电流在弱磁区域根据电流矢量角的变化而重新分配,可以看出id与iq运行轨迹平整无振荡且快速恢复至稳态值 .由图6(c)可知,电机在转速达到2 200r/min后,电磁转矩才开始明显下降,电磁转矩从恒转矩到弱磁过程过渡平滑.电机带载启动到稳定于6 000r/min约为2.5s,响应速度快.图7为使用本文方法与图2中传统直流侧电压环弱磁方法的实验对比图,包括电磁转矩与转速关系曲线以及电流相位角与转速关系曲线.从图7(a)可以看出,在弱磁区域电机运行于相同的转速,采用本文控制方法所产生的电磁转矩比采用传统弱磁方法要大.例如,在转速到达6 000r/min时,本文方法产生的转矩约为16N·m,传统弱磁方法产生的转矩约为14N·m,转矩幅度提高了约14%.由图7(b)可知,弱磁过程中达到同样的转速,相比于传统方法,本文提出弱磁方法电流相位角更小,因而进行重新分配的电流id,iq也相对更大 .这进一步说明本文提出的改进算法产生更高的转矩,更好地利用了直流母线电压.图6 弱磁控制过程实验波形Fig.6 Experimental results operating on the proposed field-weakening control method图7 本文方法与传统方法控制性能对比曲线Fig.7 Control performance comparison of proposed method and conventional method4 结论本文提出了一种新的基于内置式永磁同步电机的弱磁控制策略.基于内置式永磁同步电机弱磁原理,分析了当系统进入弱磁区域时,SVPWM调制前输出的参考电压与调制后输出的极限电压两者之间会出现电压差,并将此差值作为弱磁控制器的输入量来改变定子电流相位角,从而重新分配交直轴电流的大小来实现弱磁扩速.仿真分析和实验结果表明,本文提出的弱磁控制算法实现了电机高倍扩速运行,弱磁过渡平滑、响应速度快,且由于在弱磁区域能更有效地利用直流母线电压,相比于传统弱磁算法,电机输出更大的电磁转矩,对于改善系统的弱磁性能具有一定的实际意义和应用价值.参考文献[1] VERL A,BODSON M.Torque maximization for permanent magnet synchronous motors[J].IEEE Transactions on Control System Technology,1998,6(6):740-745.[2] KIM J M,SUL S K.Speed control of interior permanent magnet synchronous motor drive for the flux weakening operation[J].IEEE Transactions on Industry Applications,1997,33(1):43-48.[3] BAE B H,SUL S K.New field weakening technique for high saliency interior permanent magnet motor[C]//Proceedings of the Thirty-eighth IAS Annual Meeting on Industry Applications.New York:IEEE,2003:898-905.[4] 吴芳,万山明.一种过调制算法及其在永磁同步电动机弱磁控制中的应用[J].电工技术学报,2010,25(1):58-63.WU Fang,WANG Shan-ming.An overmodulation algorithm and its application in PMSM drive with flux-weakening control[J].Transactions of China Electrotechnical Society,2010,25(1):58-63.(In Chinese)[5] 赵云,李叶松.永磁同步电机宽范围最大转矩控制[J].电工技术学报,2010,25(7):45-50.ZHAO Yun,LI Ye-song.Maximum torque control of surface mounted permanent magnet synchronous motors in wide speed range[J].Transactions of China Electrotechnical Society,2010,25(7):45-50.(In Chinese)[6] 唐任远.现代永磁电机理论与设计[M].北京:机械工业出版社,2006:259.TANG Ren-yuan.Modern permanent magnet machines theory and design[M].Beijing:Machines Press,2006:259.(In Chinese)[7] KWON T S,SUL S K.Novel antiwindup of a current regulator of a surface-mounted permanent-magnet motor for fluxweakeningcontrol[J].IEEE Transactions on Industry Applications,2006,42(5):1293-1300.[8] BRIZ F,DIEZ A,DEGNER M W,etal.Current and flux regulation in field -weakening operation[J].IEEE Transactions on Industry Applications,2001,37(1):42-50.[9] IOANNOU P A,SUN J.Robust adaptive control[M].Upper Saddle River,NJ USA:Prentice-Hall,1996:785-786.。
永磁同步发电机弱磁控制策略的研究邓建国;蔡亚辉;黄守道;张洪彬【摘要】本文在转子磁链定向矢量控制的研究基础上,提出了一种基于直轴电压外环PI调节器的弱磁控制策略来解决永磁同步发电机PMSG(Permanent Magnet Synchronous Generator)在高速运行、负载增加时,交轴电枢反应增大使得发电机输出端线电压幅值超出直流母线电压这一问题,并引入电流前馈调节环节,削弱系统扰动对控制性能的影响.最后,对本文所提的控制算法进行仿真及实验验证,证明了所有控制策略的有效性.【期刊名称】《大电机技术》【年(卷),期】2016(000)005【总页数】4页(P7-10)【关键词】永磁同步发电机;弱磁控制;直轴电压外环;电流前馈调节【作者】邓建国;蔡亚辉;黄守道;张洪彬【作者单位】湖南大学国家电能变换与控制技术研究中心,长沙410082;湖南大学国家电能变换与控制技术研究中心,长沙410082;湖南大学国家电能变换与控制技术研究中心,长沙410082;湖南大学国家电能变换与控制技术研究中心,长沙410082【正文语种】中文【中图分类】TM3510 前言永磁同步发电机(PMSG)以其构造简单、体积小、重量轻、高效率和可靠性的优点,广泛用于各工业领域[1]。
永磁同步电机的控制策略有多种,在额定转速下,一般采用控制。
然而对于某些特定场合,系统对电机调速范围有了更高的要求,有时需运行在额定转速以上。
针对此种情况,需要采取弱磁控制来提高电机转速。
弱磁控制目前广泛用于永磁电动机调速系统中,在电动机端电压达到逆变器直流侧最大值后,通过减弱电动机磁场使电机转速升高,可以使电机运行在额定转速以上,从而满足恒功率控制和宽调速范围运行。
基于弱磁扩速的基本思想,学者们提出了许多控制策略用来改善弱磁控制性能,如六步电压法,自适应弱磁控制法等[2, 3]。
然而针对永磁发电机系统的弱磁控制研究的相关文献却比较少。
本文从永磁同步发电机的数学模型出发,在双闭环矢量控制的基础上提出了直轴电压外环PI调节器弱磁控制策略,并引入电流前馈调节环节来改善电机控制性能。
永磁同步电机控制系统带过调制的弱磁控制策略研究涂群章;林加堃;曾繁琦;邹世超;陆影【摘要】永磁同步电机控制系统在实际应用中,复杂多变的工况对电机的响应需求是不同的.为了拓宽电机控制系统的调速范围,且满足系统对转矩响应能力和大转矩输出特性的要求,在弱磁控制策略的基础上引入过调制方法,将其应用于永磁同步电机控制系统,并进行仿真和实验研究.结果表明,相比于无过调制的弱磁控制策略,带过调制的弱磁控制策略能使系统在调速过程中充分利用直流母线电压,从而提高了转矩响应和大转矩输出能力,缩短了转速响应时间,同时电机的工作效率符合应用要求.【期刊名称】《兵工学报》【年(卷),期】2016(037)005【总页数】8页(P953-960)【关键词】兵器科学与技术;永磁同步电机;控制系统;弱磁控制;过调制【作者】涂群章;林加堃;曾繁琦;邹世超;陆影【作者单位】解放军理工大学野战工程学院,江苏南京 210007;解放军理工大学野战工程学院,江苏南京 210007;军事交通学院军用车辆系,天津 300161;海拉(厦门)电气有限责任公司,福建厦门 361100;解放军理工大学野战工程学院,江苏南京210007【正文语种】中文【中图分类】TM301.2永磁同步电机(PMSM)的励磁由永磁体提供,没有励磁损耗,因此,与一般电机相比,PMSM具有更高的功率密度和效率,从世界电传动研究情况以及电机发展水平来看[1],PMSM是军用电传动履带推土机的最佳选择。
军用履带推土机由于要求具备良好的机动性,因而需要尽量扩大其驱动电机的调速区间;在推土作业工况下则要求电机控制系统具有快速准确的转矩响应,在爬坡、突然加减速和深度挖掘时还应具有高效的大转矩输出特性。
为了拓宽电机调速范围,PMSM可采用弱磁控制策略。
对电机进行弱磁控制时,由于电压接近饱和[2],电机的转矩响应能力会弱化。
因此为了进一步提高直流电压利用率,人们在调制方法和过调制方法方面都进行了相关研究,在正弦波脉宽调制(SPWM)参考电压中加入3次谐波可提高电压利用率和消除特定次数谐波的离线脉宽调制方法[3]等都是在调制方法方面的改进,过调制方法则是在1991年Kerkman等提出逆变器增益的概念后开始得到了深入研究[4-7]。
永磁同步电机的弱磁控制方法
永磁同步电机的弱磁控制方法主要是通过改变电机的定子电压来实现。
具体的方法包括:
1. 降低定子电压:降低定子电压可以减少磁场的强度,从而实现弱磁控制。
可以通过调节主控制器的输出电压或者使用变压器等方式降低定子电压。
2. 改变定子电流相位:可以通过改变定子电流的相位来改变磁场的强度。
通过控制主控制器的开关方式,可以改变电流的相位,从而达到弱磁控制的目的。
3. 调节磁场励磁:可以通过调节电机的励磁电流来改变磁场的强度。
通过控制主控制器的励磁电流,可以实现弱磁控制。
4. 使用矢量控制方法:矢量控制方法是一种智能控制方法,可以通过控制电流和磁场的方向来实现弱磁控制。
通过计算电机的电流和磁场的方向,然后调节主控制器的输出,可以实现弱磁控制。
总的来说,弱磁控制方法主要是通过调节定子电压、定子电流相位、励磁电流或使用矢量控制方法来实现。
这些方法可以有效地控制永磁同步电机的磁场强度,从而实现弱磁运行。
永磁同步电动机弱磁控制方法研究
永磁同步电动机是一种高效、高功率密度的电动机,具有广泛的应用前景。
然而,在低速和负载突变情况下,永磁同步电动机容易出现弱磁问题,导致性能下降甚至无法正常工作。
因此,研究永磁同步电动机的弱磁控制方法具有重要意义。
首先,弱磁控制方法的研究需要充分了解永磁同步电动机的工作原理和特性。
永磁同步电动机由永磁体和同步电机部分组成,通过控制电流和磁场来实现电动机的运行。
在弱磁情况下,电机的磁场强度不足,导致输出扭矩下降。
针对永磁同步电动机弱磁问题,研究者提出了多种解决方案。
一种常用的方法是增加励磁电流来增强磁场强度,但这样会增加功耗和成本。
另一种方法是通过优化控制策略来减小弱磁对电机性能的影响。
在控制策略方面,研究者提出了磁场观测器和自适应控制算法等方法。
磁场观测器通过测量电机终端电压和电流来估计电机磁场,从而实现对弱磁的实时监测和控制。
自适应控制算法则根据电机的工作状态和负载情况来调整控制参数,以提高电机的响应速度和稳定性。
此外,还有一些新兴的弱磁控制方法值得关注。
比如,基于神经网络的控制方法可以通过学习电机的非线性特性来提高电机
的弱磁控制性能。
另外,基于模型预测控制的方法可以通过建立电机的数学模型来预测电机的动态响应,并根据预测结果进行控制。
综上所述,永磁同步电动机的弱磁控制方法研究具有重要意义。
通过合理选择控制策略和优化控制参数,可以有效解决永磁同步电动机的弱磁问题,提高电机的性能和可靠性。
未来的研究可以进一步探索新的控制方法和技术,以适应不同工况和应用场景的需求。
永磁同步电机弱磁控制的控制策略研究摘要永磁同步电机是数控机床、机器人控制等的主要执行元件,随着稀土永磁材料、永磁电机设计制造技术、电力电子技术、微处理器技术的不断发展和进步,永磁同步电机控制技术成为了交流电机控制技术的一个新的发展方向。
基于它的优越性,永磁同步电机获得了广泛的研究和应用。
本文对永磁同步电机的弱磁控制策略进行了综述,并着重对电压极限椭圆梯度下降法弱磁控制、采用改进的超前角控制弱磁增速、内置式永磁同步电动机弱磁控制方面进行了调查、研究。
关键词:永磁同步电机、弱磁控制、电压极限椭圆梯度下降法、超前角控制、内置式永磁同步电动机一、永磁同步电机弱磁控制研究现状1.永磁同步电机及其控制技术的发展任何电机的电磁转矩都是由主磁场和电枢磁场相互作用产生的。
直流电机的主磁场和电枢磁场在空间互差90°电角度,因此可以独立调节;而交流电机的主磁场和电枢磁场互不垂直,互相影响。
因此,交流电机的转矩控制性能不佳。
经过长期的研究,目前交流电机的控制方案有:矢量控制、恒压频比控制、直接转矩控制等[1]。
1.1 矢量控制1971年德国西门子公司F.Blaschke等与美国P.C.Custman等几乎同时提出了交流电机磁场定向控制的原理,经过不断的研究与实践,形成了现在获得广泛应用的矢量控制系统。
矢量控制系统是通过坐标变换,把交流电机在按照磁链定向的旋转坐标系上等效成直流电机,从而模仿直流电机进行控制,使交流电机的调速性能达到或超过直流电机的性能。
1.2 恒压频比控制恒压频比控制是一种开环控制,它根据系统的给定,利用空间矢量脉宽调制转化为期望的输出进行控制,使电机以一定的转速运转。
但是它依据电机的稳态模型,从而得不到理想的动态控制性能。
要获得很高的动态性能,必须依据电机的动态数学模型,永磁同步电机的动态数学模型是非线性、多变量,它含有角速度与电流或的乘积项,因此要得到精确控制性能必须对角速度和电流进行解耦。
近年来,研究了各种非线性控制器,来解决永磁同步电机非线性的特性。
1.3 直接转矩控制矢量控制方案是一种很有效的交流伺服电机控制方案,但是由于该方案需要进行矢量旋转变换,坐标变换比较复杂。
此外,由于电机的机械常数慢于电磁常数,矢量控制中转矩响应的速度不够迅速。
针对矢量控制的上述缺点,德国学者Depenbrock于上世纪80年代提出了一种具有快速转矩响应特性的控制方案——直接转矩控制(DTC)方案。
直接转矩摒弃了矢量控制中解耦的控制思想以及电流反馈环节,采取定子磁链定向的方法,利用离散的两点式控制直接对电机的定子磁链和转矩进行调节,具有结构简单,转矩响应快等优点[2]。
2.永磁同步电机弱磁控制研究现状弱磁控制是目前PMSM的一个研究热点,电动机减弱磁场就可以实现高速运行(转矩也随之减小),因此,直流电机和感应电机都积极地进行弱磁控制,以便扩展最高转速。
对于PMSM由于转子是永磁体,不能简单通过控制励磁电流实现弱磁控制,可以在抵消永磁体磁通的方向上施加一个励磁性质的电流,实现弱磁控制。
但是,对于永磁体来说,存在着一个如何避免不可逆退磁的问题。
目前,具有高磁能积的永磁材料的实用化,使得PMSM的弱磁控制得以实现,以下是现阶段国内弱磁控制的发展状况。
2.1 从控制角度梁振鸿等人采用过调制技术[3],根据零电压矢量作用时间判断过调制起始点,用查表法确定调制比,提高逆变器直流母线电压利用率,实现对永磁同步电动机弱磁运行区域的扩展。
slligo Morilnoto [4]等人采用电流调节器,实现永磁同步电动机的弱磁控制,电流调节器包括前馈解耦环节和电压补偿环节,定子交轴电流由电机角频率给定值与实际值之间的偏差决定,定子直轴电流由每安培最大转矩控制方案决定。
Jang-Molll kim [5]等人提出了将直流母线电压作为一个反馈量用于电压外环调节的改进方案,从而使系统工作在最大电压利用状态。
控制外环的电压可以确保电流调节器在任何工况下不至于饱和,从而取得较满意的控制效果。
Sozer等人提出了自适应弱磁控制法[6]以克服电流调节器饱和的问题。
Jiunn-Jiang Chen[7]等人将非线性降维状态观测器应用于弱磁控制,从而提高控制系统对电机参数变化的鲁棒性。
2.2 从电机本体角度传统结构的永磁同步电动机弱磁效果较差从结构上看,由于永磁体磁阻率接近于空气,传统结构的永磁同步电动机,其永磁体总是串联在电机的直轴磁路上,等效气隙很大,直轴电抗很小,在正常的电枢电压下,不可能获得很大的直轴电流,因而无法获得满意的弱磁效果。
这就要求寻找特种结构的永磁同步电动机,以适应弱磁运行的要求[8]。
Richard F.Schifcrl、伊华杰等设计了一种复合转子结构永磁同步电动机,从电机的本体上解决了弱磁扩速难的问题。
二、永磁同步电机弱磁控制的控制策略(一)电压极限椭圆梯度下降法弱磁控制文献[9]提出了电压极限椭圆的梯度下降法进行弱磁,该方法主要分为确定弱磁区域和修正电流参考值两部分。
这种方法快速性强,控制精度高,不需查表,实现简单且准确率高,鲁棒性好。
1. 电压极限椭圆和电流极限椭圆u要受逆变器电压极限的制约,于是有定子电压||s2r m a x s 2q q 2d d 0) ()(⎪⎪⎭⎫ ⎝⎛≤++ωi x i x e u ρ (1) 同样,逆变器输出电流的能力也要受其容量的限制,定子电流也有一个极限值,即m a x s s i i ≤ (2)若以定子电流矢量的两个分量表示,则有2m a x s 2q 2d i i i ≤+ (3)由上式构成了电压极限椭圆和电流极限圆,如图1所示。
图中,电流极限圆的半径为1,即设定smax i 等于额定值。
由式(1)可以看出,电压极限椭圆的两轴长度与速度成反比,随着速度的增大便形成了逐渐变小的一簇套装椭圆。
因为定子电流矢量s i 既要满足电流极限方程,又要满足电压极限方程,所以定子电流矢量s i 一定要落在电流极限圆和电压极限椭圆内。
例如,当r r1ωω=时,s i 要被限制在ABCDEF 范围内。
图1 电流极限圆和电压极限圆2. 弱磁区域的确定永磁同步电动机运行过程中的电流、电压轨迹如图2所示。
根据运行情况,可划分为两个弱磁区域:1) 弱磁区域I 。
定义电磁转矩与产生其所需的电流的比为转矩电流比。
基频以下电动机恒转矩运行,采用线性最大转矩电流比控制,如图中OA 所示; 最大转矩电流比曲线和最大转矩电压比曲线之间的区域称为弱磁区域I 。
2) 弱磁区域 II 。
在基频以上,电动机沿着 MT-PV 曲线运行,称为弱磁区域 II 。
图2 永磁同步电动机运行过程中的电流、电压轨迹3. 系统结构框图图3为永磁同步电动机调速系统结构框图。
虚线部分为电流修正值计算模块。
速度指令信号与检测到的转子速度信号相比较,经速度控制器的调节,输出电磁转矩Te 指令信号,经MTPA 模块后输出d 、q 轴电流1d i 、1q i 作为指令信号。
dx i 、qx i 分别为 d 、q 轴的电流修正值。
图3 永磁同步电动机调速系统结构框图4. 基于梯度下降法的内埋式永磁同步电机弱磁控制策略内埋式永磁同步电机(IPMSM)由于结构上的特点使其在性能上有很多突出的优点,如高功率密度、高功率因数、结构紧凑、调速范围宽等,正是由于这些优点使其广泛应用于家用电器、交通运输、磁盘驱动器以及机床、机器人等数控系统。
轨道交通和电力牵引传动系统要求电机在速度较低的时候能够输出比较大的转矩,这样可以满足起动、加速、低速爬坡等要求,除了对基速以下的一些要求外,还要求在速度范围上能够更加宽广,这就对电机的弱磁性能提出了要求,要求其调速的范围大。
内埋式永磁同步电机由于存在结构转矩,比较容易弱磁,且输出转矩大,因此对内埋式永磁同步电机的研究具有重要的意义[10]。
基于梯度下降法的弱磁控制算法,不需要查表,控制精度高,响应速度快,且鲁棒性好。
具体算法描述如下。
内埋式永磁同步电机运行过程中电流、电压轨迹曲线如图4所示。
基速以下,电机运行在恒转矩区域,采用线性最大转矩电流比(MTPA)控制可以使永磁同步电机获得最大的电磁转矩[11],如图中OA 曲线所示。
随着转速的升高,电机将沿着最大转矩电流比曲线OA 和最大转矩电压比(MTPV)曲线BC 之间的恒转矩曲线运行,即为弱磁区域I(FWRl)。
在更高的转速范围,电机沿着MTPV 曲线BC 运行,即上述弱磁区域2(FWR2),如图2所示。
对于给定参考转矩瓦,随着转速的升高,电机沿着恒转矩曲线DE 运行,到达E 点之后,如果转速继续升高,电机将沿着MTPV 曲线EC 运行,其输出转矩逐渐减小M 。
在弱磁过程中,最主要的是确定设定电流修正值的大小。
首先根据电机的运行曲线确定其所在的弱磁区域(FWRl 、FWR2),再根据所在的弱磁区域,对电流设定值进行相应的修正。
(二)采用改进的超前角控制弱磁增速超前角弱磁控制算法是目前较为常用的弱磁控制方法[12]。
运用该算法控制表贴式永磁同步电机运行于弱磁区时,随着负载的增加,通常会出现如下问题: 从恒转矩区到恒功率区的过渡过程中,出现较大的电流震荡,从而引起速度波动,系统的动态性能变差。
而在恒功率区,会出现稳态速度下降的现象,稳态时的速度和电流波动也会变大,系统的稳态性能不佳。
1. 表贴式永磁同步电机数学模型及传统超前角弱磁控制算法d -q 轴系下表贴式永磁同步电机定子电压方程为[13]d s d d d r q q d u R i L i L i dtω=+- q s q q q r d d r f d u R i L i L i dtωωψ=+-+ (4) 式中:d L 和q L 分别为直轴和交轴同步电感,且d L =q L ,s R 为定子相电阻,r ω为转子的电角速度,f ψ为转子永磁体产生的励磁磁场的基波磁链。
电机高速稳定运行时,忽略定子压降,电压方程可以改写为d iq r d d r f u L i ωωψ=+ (5)电机定子电压s u =由式(5)可得s u ω= (6) 由式(6)可以看出,当电机定子电压达到逆变器的输出极限时,为了使转速r ω升高,只能通过增加直轴去磁电流分量d i 和减小交轴电流分量 q i ,以维持电压平衡,达到弱磁调速的目的。
图4为传统超前角弱磁算法的控制框图,其基本原理为:以电流环的输出值作为电压 PI 调节器的输入控制量,与给定电压 max U 之间的差值通过电压PI 调节器来控制电机定子电流矢量与 q 轴之间的超前角 β。
max U 为/dc U 其中dc U 为逆变器直流母线电压。
当 s u 低于 max U 时,由于饱和环节的作用,PI 调节器处于正向饱和,输出电流超前角β=0,此时d i = s i ,sin β= 0,电机运行在恒转矩区。