基于Matlab-Simulink的机械振动仿真研究
- 格式:doc
- 大小:2.64 MB
- 文档页数:37
2018年第1期时代农机TIMES AGRICULTURAL MACHINERY第45卷第1期Vol.45No.12018年1月Jan.2018作者简介:刘鸿智(1988-),男,辽宁沈阳人,硕士研究生,助教,主要研究方向:机械设计及理论、机械制造。
基于MATLAB 的机械振动分析研究刘鸿智(,458030)摘要:矩阵工厂的应用是在关于机械振动的问题应用,这说明矩阵实验室的应用可以用来解决一些在机械振动方面的比较复杂的计算和作图等问题,并且很方便且高效。
矩阵实验室对解决机械振动方面的问题有着很多的作用。
所以说,在一些机械振动方面的问题解决可以大力推广矩阵实验室的使用。
矩阵实验室对机械振动的一些系统理论的分析或研究有着一些特定的步骤。
一些系统运用矩阵实验室软件中的数值积分法来对该系统作出分析。
矩阵实验室软件可以用来计算也可以用来编程,在一些问题的提出和表达通常会采用数学描述方法来对一些机械振动的问题进行计算,而不是用传统的语言程序进行处理。
这样会使矩阵实验室成为一些应用程序得到良好的开发。
关键词:机械振动;MATLAB 软件;分析矩阵实验室是对于机械振动问题处理及数值计算的分析软件。
这个软件可以将一些数值及函数调用出来,对相关问题进行运算,这种特征对一些机械振动中经常会遇到的问题及所需要的公式计算提供较为便捷的途径及可以比较方便的去对机械振动涉及到的问题进行计算。
因此对于机械专业并且在学习机械振动又换问题过程中应当采用矩阵实验室软件,使得部分专业人员能够使用矩阵实验室软件进而对专业理论知识进行有效研究,也可以利用矩阵实验室软件来解决机械振动实际上所存在的问题。
机械振动是一个比较普遍的现象,是通过物体的来回运动而使物体发生位移等物理运动。
矩阵实验室软件的出现给一些工程问题的研究与解决带来了很大程度上的方便。
在其它应用软件的使用过程中,一些数值计算的问题可能没有那么容易操作,可能一些数据也没有那么可视化,而矩阵实验室相比之下有很大的改善,给一些机械问题带来很多的便利。
山东大学Matlab 课程作业学院:机械工程学院专业:姓名:学号:基于Simulink仿真得振动学问题解决实例1.单自由度无阻尼自由振动仿真表达式:仿真框图:参数设置:k=100N/m m=4kg初始状态:初速度为0 初始位移为5仿真结果:2.简谐波形得里沙茹图形分析仿真框图:参数设置:K=100m=4→rad/sSin wave参数设置:Amplitude1 ;Frequency 5 1015初始状态:①→φ=②→φ=③=1,=5→φ=45;④=1,=−5→φ=135;⑤=0,=−1→φ=180XY Graph参数x-min -2;x-max 2;y-min—2; y-max 2Frequency 5时仿真结果:Frequency 10时仿真结果:Frequency 15时仿真结果:3.单自由度有阻尼自由振动表达式:仿真框图:参数设置:ﻫ令k=100,m=10,c=10 初始状态:ﻫ初始速度为0,位移为1仿真结果:4、衰减振荡得阻尼比得估计参数:k=100,m=10,c=2初始条件:x0=1,v0=0仿真图框:初始振幅为1,约7个周期时衰减为0、25,对数减幅:δ=(ln4)/7≈0、099阻尼比§≈δ/2≈0、032理论值§=0、5c(km)−0、5≈0、0325、单自由度有阻尼+正弦激励表达式:令激励则方程变形为参数设置:令k=4,m=1,c=0、2初始状态:ﻫ初始速度为0,位移为0、05 仿真框图:仿真结果:6、利用速度共振得里沙茹图进行固有频率与阻尼系数分析仿真框图:改变激励频率:=1、2;1、6;1、8;1、9;1、95;2;2、05;2、1;2、2等7、两自由度无阻尼系统自由振动表达式:参数设置:m1=1,m2=2 k1=1,k2=1,k3=2初始状态:①速度0,m1、m2位移均为1②速度0,m1位移1,m2位移−0、5③速度0,m1位移1,m2位移0 仿真结果:①②③。
0引言在实际工程中,许多物体都涉及到振动问题,比如在行驶过程中的汽车、城市轨道车辆、高速运行的动车等。
但是对于很多复杂物体的振动分析较为困难,因此在分析的过程中要加以简化才可以。
通常而言,大部分物体振动可以简化为简单的三自由度系统,这样更加方便计算和分析。
比如现在的汽车在满足安全的同时追求更好的驾驶舒适性,其车的结构也是越来越复杂。
大多数汽车座椅下面使用了弹簧和橡胶来吸收振动、缓解冲击,同时在汽车底盘和轮胎处都采用了减振装置,这所有就可以看成一个三自由度的系统。
简化模型来解决复杂振动问题,可以采用理论分析和数值仿真,数值仿真通常用Matlab 。
本文主要针对工程中常用的三自由度系统的简化模型进行了分析,综合采用理论计算和数值仿真。
理论计算做了三自由度的运动微分方程、固有频率和主振型的计算,数值仿真做了系统的模型用来分析各部分在外界激励的作用下的位移响应曲线。
本文用的是Simulink 动态分析,它可以在做出实际系统之前,预先对设计的系统进行仿真分析,并可以根据仿真结果随时进行参数的修正,提高系统的性能和稳定性,以减少对实际系统的设计与修改,实现高效率的开发和设计分析系统的目的。
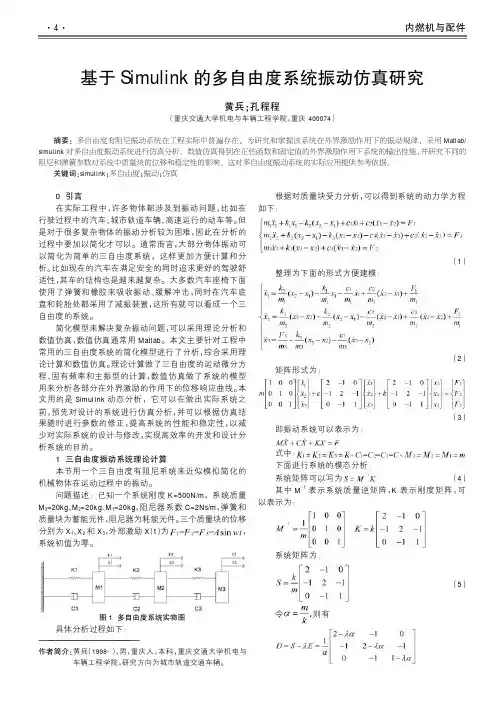
1三自由度振动系统理论计算本节用一个三自由度有阻尼系统来近似模拟简化的机械物体在运动过程中的振动。
问题描述:已知一个系统刚度K=500N/m ,系统质量M 3=20kg 、M 2=20kg 、M 1=20kg ,阻尼器系数C=2Ns/m ,弹簧和质量块为蓄能元件,阻尼器为耗能元件。
三个质量块的位移分别为X 1、X 2和X 3,外部激励X (t )为,系统初值为零。
图1多自由度系统实物图具体分析过程如下:根据对质量块受力分析,可以得到系统的动力学方程如下:(1)整理为下面的形式方便建模:(2)矩阵形式为:(3)即振动系统可以表示为:式中:、、下面进行系统的模态分析:系统矩阵可以写为(4)其中M -1表示系统质量逆矩阵,K 表示刚度矩阵,可以表示为:系统矩阵为:(5)令,则有———————————————————————作者简介:黄兵(1998-),男,重庆人,本科,重庆交通大学机电与车辆工程学院,研究方向为城市轨道交通车辆。
基于MATLAB 的机械振动分析摘要院大多数情况下机械振动是有害的。
机械振动特别是在共振情况下,可使机器和仪器的功能受到影响,结构和构件损坏或产生变形,因此必须进行有效的控制。
利用MATLAB 软件强大的计算分析功能,可以较好地分析振动情况,解决实际问题。
本文利用MATLAB 软件对两自由度系统的振动进行了详细分析,通过改变参量的数值研究其运动规律,从而更好地理解振动特点,为实际生产提供理论参考。
Abstract: In most cases, mechanical vibration is harmful. Mechanical vibration, especially in the case of resonance, will affect theperformance of the machinery and equipment. Therefore it should be controlled.MATLAB software is powerful in analysis. It can analyse vibration well so that to solve practical problems. The paper, making use ofMATLAB, carries out a detailed analysis on two degrees of freedom vibration system by changing the parameters to research the movement.So vibration can be understood better, and a theoretical reference will be supplied for the actual production.关键词院机械振动;MATLAB;阻尼;两自由度Key words: vibration;MATLAB;damping;Two-DOF中图分类号院TH113.1 文献标识码院A 文章编号院1006-4311(2014)16-0035-021概念综述MATLAB 集计算、可视化及编程于一身。
基于MATLABSimulink的机械系统仿真技术基于 MATLAB/Simulink 的机械系统仿真技术在当今科技飞速发展的时代,机械系统的设计和优化变得日益复杂。
为了更高效、准确地预测和分析机械系统的性能,基于MATLAB/Simulink 的机械系统仿真技术应运而生。
这项技术为机械工程师和研究人员提供了强大的工具,帮助他们在实际制造之前,就能对机械系统的行为有深入的了解和准确的预测。
机械系统仿真技术的核心在于通过建立数学模型来模拟真实世界中机械系统的运行。
而 MATLAB/Simulink 作为一款功能强大的数学计算和建模软件,为实现这一目标提供了丰富的资源和便捷的操作环境。
首先,让我们来了解一下 MATLAB/Simulink 的一些基本特点。
MATLAB 具有强大的数值计算和数据分析能力,能够处理复杂的数学公式和算法。
Simulink 则是一个基于图形化的建模环境,用户可以通过拖拽和连接各种模块来构建系统模型,这种直观的操作方式大大降低了建模的难度,提高了工作效率。
在机械系统仿真中,常见的模型类型包括刚体动力学模型、柔性体模型、传动系统模型等。
以刚体动力学模型为例,我们可以使用牛顿定律和欧拉方程来描述物体的运动。
通过在 Simulink 中定义质量、惯性矩、力和力矩等参数,以及它们之间的关系,就能模拟出刚体的运动轨迹和受力情况。
对于复杂的机械系统,如汽车的悬挂系统,不仅需要考虑刚体的运动,还需要考虑弹性元件和阻尼器的特性。
这时,就可以引入柔性体模型。
通过有限元分析等方法,可以将柔性体的模态信息导入到Simulink 中,与刚体模型相结合,从而更真实地反映系统的动态特性。
传动系统也是机械系统中的重要组成部分。
例如,齿轮传动系统的建模需要考虑齿轮的齿数、模数、压力角等参数,以及齿面接触和摩擦等因素。
在 MATLAB/Simulink 中,可以使用专门的模块来构建齿轮传动模型,并与其他部件的模型进行集成,以分析整个传动系统的性能。
基于MATLAB的机械工程模拟仿真研究近年来,随着计算机和仿真技术的不断发展,基于MATLAB的机械工程模拟仿真研究逐渐成为了一个热门的领域。
这项技术可以帮助工程师们在设计和优化机械系统时更加准确地预测系统的性能,提高工作效率和质量。
一、背景和介绍机械工程模拟仿真是通过计算机模拟和解析机械系统的动态和静态特性,以实验和验证设计方案的可行性和优化性能。
它允许工程师在真正制造和测试原型之前对机械系统进行多次虚拟试验,大大减少了实验成本和时间。
二、MATLAB在机械工程仿真中的应用MATLAB是一种非常强大且灵活的工具,可以用于各种工程领域的数值计算和仿真研究。
在机械工程中,MATLAB可以用来建立机械系统的数学模型,并通过数值计算方法来求解和分析这些模型。
例如,可以使用MATLAB来解决机械系统的动力学和静力学问题,计算系统的运动轨迹和速度加速度等参数。
三、机械系统的建模和仿真在进行机械系统的建模和仿真时,首先需要对系统进行几何分析和运动分析,在MATLAB中使用相应的工具和函数来描述系统的几何特征和运动规律。
然后,根据现实世界中的物理规律,构建机械系统的数学模型和运动方程。
有了这些模型和方程,可以使用MATLAB的数值计算工具来模拟和分析机械系统的动态特性。
例如,可以通过求解非线性常微分方程组来得到机械系统的运动轨迹和状态变量。
四、机械系统的优化和设计除了模拟和分析机械系统的动态特性之外,基于MATLAB的仿真还可以用于机械系统的优化和设计。
通过改变系统的参数和约束条件,可以利用MATLAB的优化工具来寻找最优的设计方案。
例如,可以通过最小化机械系统的重量或最大化其工作效率来确定最佳设计。
五、仿真结果的验证与分析仿真结果的验证和分析是机械工程仿真研究的重要环节。
通过与实际测试结果进行对比,可以验证仿真模型和方法的准确性和可靠性。
同时,还可以对仿真结果进行进一步分析,以了解系统的性能特点和优化潜力。
软件2013年第34卷 第1期国际IT传媒品牌0 引言在工程实际中,控制系统的结构往往很复杂,如果不借助专用的系统建模软件很难准确地把控制系统的复杂模型输入给计算机[1-2]。
Simulink是Matlab软件下的一个附加组件,是建模与动态仿真的工具平台,它提供了丰富的仿真模块[3]。
利用simulink提供的平台,很容易利用系统提供的各种子模块,建立所需要的控制系统模型,再对这个系统进行仿真与分析,从而使得一个复杂系统的输入输出以及控制变得相当的简单和直观[4-5]。
研究不同参数对实际物理模型输入响应的影响,可能会耗费大量的财力和时间去实验,对实际控制系统的参数设置之前,对该系统进行仿真,必将为仪器设计提供有益参考[6-7]。
通过动画设计还能够清晰地看到机械运动过程,这对于改善运动性能有很大帮助。
为此,本文以常见的物理模型-弹簧振子阻尼震动系统为例,采用simulink模块仿真和Matlab动画两种仿真方法对其运动轨迹进行仿真。
两种方法相比,又各有侧重和优点,其中simulink偏重精准和理论研究,动画仿真则以直观的运动过程展现了机械控制系统的响应曲线,与实际观察过程类似。
研究发现,所得的运动轨迹基本相符,从而验证了两种方法在对物理模型进行分析时的可行性。
1 模型的建立以常见的经典的弹簧振子模型作为仿真实验的物理模型。
它具有三个物理对象,分别是弹簧,物体和阻尼器。
其中,为了方便计算,认为弹簧为理想弹簧,忽略其阻尼,可选用弹性系数=1m/N。
取小球的质量为0.25kg。
阻尼器是摩擦力随着速度的变化而变化,其摩擦力与速度呈正比,比例系数设为阻尼系数=0.1。
以重力为输入信号,以小球的运动偏移量为输出信号。
设变量输入为,输出为,阻尼器摩擦力为,弹簧弹力为,运动方程如下:(1)其传递函数为(2)时,此传递函数为二阶,所以标准形式为(3)基于simulink的机械控制系统的仿真设计吴建伟1,张卫红2,秦献疆1(1. 中国联合网络通信有限公司保定市分公司, 保定 071051; 2. 保定市第一中医院, 保定 071000)摘 要:为了直观地表示机械控制系统抽象的运动过程,基于Matlab软件的simulink模块,以弹簧振子阻尼振动的阶跃响应为例,以二阶系统在不同阻尼比ζ下的单位阶跃响应为物理模型,对于机械控制系统以动画形式演示了其运动轨迹。
目 录1引言——机械振动的仿真原理 (1)1.1 Matlab Simulink 功能简述 (1)1.2机械振动的物理模型 (1)1.2.1简谐振动的物理模型 (1)1.2.2阻尼振动的物理模型 (2)1.2.3受迫振动的物理模型 (2)1.3 Matlab Simulink 仿真原理简述 (4)2简谐振动方程的解及其模拟仿真 (5)2.1简谐振动方程的求解 (5)2.2简谐振动模型的仿真研究 (5)2.2.1基本模型的建立 (5)2.2.2 速度、加速度的监测 (7)2.2.3 动能、势能、机械能监测 (8)2.3简谐振动的图像分析 (9)3阻尼振动方程的求解和仿真模拟 (11)3.1弹簧振子做阻尼振动方程的求解 (11)3.2弹簧振子做阻尼振动的模拟仿真研究 (11)3.3阻尼振动的图像分析 (14)4受迫振动的方程的求解和仿真模拟 (16)4.1弹簧振子做受迫振动方程的求解 (16)4.2弹簧振子做受迫振动的仿真模拟研究 (17)4.2.1策动力频率0ωω<时弹簧振子的受迫振动仿真模拟 (17)4.2.2策动力频率0ωω>时弹簧振子受迫振动的仿真模拟 (20)4.2.3策动力频率0ωω=时弹簧振子的仿真模拟 (22)4.3受迫振动的图像分析 (23)5几点补充说明与仿真模拟中问题分析 (25)5.1物理振动模型建立的补充说明 (25)5.2方程求解中的补充说明 (25)5.3仿真模拟中的问题分析 (25)6结语 (27)参考文献 (28)附录 (29)致 (30)摘要机械振动主要有简谐振动,阻尼振动,受迫振动三种。
对三种振动建立模型,列出振动方程,再对三种振动给定初始条件,就可以利用Matlab Simulink功能对三种振动进行仿真模拟,得出振动的位移,速度,加速度,动能,势能,机械能随时间的变化关系图像。
另外,我们对振动方程求解,得出振子位移关于时间的函数,再分别对其求一阶、二阶导数,就可以得出速度、加速度函数,再经过简单运算就可以得到动能、势能、机械能函数。
我们再通过分析函数来分析其图像,再对比仿真模拟出的图像,就可以确定我们的仿真研究方法的可信度。
关键词:简谐振动;阻尼振动;受迫振动;共振AbstractThe mechanical vibration mainly includes three kinds of vibrations: the simple harmonic oscillator, the pure damping vibration and the forced damping vibration. According to the three vibrations, we can build models for them, list the vibration equations. After giving the initial conditions, we can carry out analog simulations to test the three vibrations by using Matlab Simulink functions, and obtain the images of vibration displacement, velocity, acceleration, kinetic energy, potential energy, mechanical energy variation over time. In addition, we come to the function of oscillator displacement over time after we seek the solution of equations. And then we can gain the derivatives of their first order and second order respectively, so we can draw functions of speed and acceleration. Furthermore, we can get the functions of kinetic energy, potential energy, mechanical energy by a simple operation. Let us analyze the images by analyzing the functions, and then we make a comparison between the images of analog simulations and them. Finally, we can determine the credibility of the simulation methodology.Keywords:Simple harmonic oscillator; Damping vibration; Forced vibration; Resonance1引言——机械振动的仿真原理1.1 Matlab Simulink 功能简述Simulink 是基于Matlab 的框图设计环境,可以用来对各种动态系统进行建模、分析和仿真,它的建模围广泛,可以针对任何能用数学来描述的系统进行建模,例如航空航天动力学系统、卫星控制制导系统、通信系统、船舶及汽车等,其中包括了连续、离散,条件执行,事件驱动,单速率、多速率和混杂系统等。
Simulink 提供了利用鼠标拖放的方法来建立系统框图模型的图形界面,而且还提供了丰富的功能块以及不同的专业模块集合,利用Simulink 几乎可以做到不书写一行代码即完成整个动态系统的建模工作。
除此之外,Simulink 还支持Stateflow ,用来仿真事件驱动过程。
Simulink 是从底层开发的一个完整的仿真环境和图形界面,是模块化了的编程工具,它把Matlab 的许多功能都设计成一个个直观的功能模块,把需要的功能模块用连线连起来就可以实现需要的仿真功能了。
也可以根据自己的需要设计自己的功能模块,Simulink 功能强大,界面友好,是一种很不错的仿真工具[1]。
1.2机械振动的物理模型物理学中的机械振动主要分为简谐振动、阻尼振动、受迫振动三种。
下面我们根据这三种类型的振动建立物理模型来分别研究。
1.2.1简谐振动的物理模型图1 弹簧振子做简谐振动物理实验模型如上图所示,弹簧振子在O 附近做简谐振动。
已知弹簧振子质量为m ,所受合力为F ,弹簧劲度系数为k ,则有:F kx =-。
又由牛顿第二定律有: 22d x F ma m dt == (1) 于是可以得到: 220d x k x dt m+= (2) 令m k =2ω,则可得: 2220d x x dt ω+= (3) 方程(3)的解x 即为弹簧振子在时刻t 时的振动位移,一阶导数x 即为弹簧振子在时刻t 时振动速度,其二阶导数x 即为弹簧振子在时刻t 时的加速度。
1.2.2阻尼振动的物理模型如图1,若弹簧振子在x 轴上受到粘滞阻尼的作用力,则弹簧振子做阻尼的振动。
设弹簧振子受到的阻尼力为: dx f v dtγγ=-=- (4) 式中γ 为阻尼系数,与物体的形状以及周围性质有关。
弹簧振子受到的弹力为F kx =-,则对弹簧振子,有牛顿第二定律有:22d d d d x x m kx t tγ=-- (5) 整理后得: 22d d d d x k x x t m m tγ=-- (6) 令20k m ω=,2n mγ=,则有: 2202d d 20d d x x n x t tω++= (7) 这就是阻尼振动的振动方程。
其解x 即为弹簧振子在时刻t 时的振动位移,一阶导数x 即为弹簧振子在时刻t 时振动速度,其二阶导数x即为弹簧振子在时刻t 时的加速度。
1.2.3受迫振动的物理模型如图2,弹簧振子在O 附近做阻尼振动。
已知弹簧振子质量为m ,弹簧劲度系数为k 。
平行于x 轴的平面对弹簧振子有阻尼力的作用。
对弹簧振子施加一外加激励力()f t ,设0()sin f t F t ω=,则称为谐激励力,其中ω为外施激励频率,t 是持续时间。
对弹簧振子受力分析,其所受弹力为:F kx =-。
由于阻尼振动是振幅(或能量)随时间不断减少的振动。
能量减少的原因是有粘滞阻尼和辐射阻尼。
为方便,均视为粘滞阻尼。
则弹簧图2 弹簧振子在外加激励力作用下做阻尼受迫振动振子所受阻尼力为: dx f v dtγγ=-=- (8) 式中γ 为阻尼系数,与物体的形状以及周围性质有关。
则对弹簧振子,由牛顿第二定律有:202sin d x dx m kx F t dt dt γω=--+ (9) 对(9)式变形可得:202sin F d x k dx x t dt m m dt mγω=--+ (10) 令00,2,F k n h m m m γω===,0ω为固有频率,n 为阻尼因数,则(10)可变为: 22022sin d x dx n x h t dt dtωω++= (11) 方程(11)的解就是时刻t 时弹簧振子的位移,其一阶导数x 即为弹簧振子在时刻t 时振动速度,其二阶导数x 即为弹簧振子在时刻t 时的加速度[2]。
我们记0/n ξω=为相对阻尼系数或阻尼比。
根据阻尼对系统振动的影响,振动响应分为弱阻尼(ξ<1)、强阻尼(ξ>1)和临界阻尼(ξ=1)三种情况,这里仅讨论弱阻尼的情况。
1.3 Matlab Simulink仿真原理简述在得到弹簧振子的简谐振动、阻尼振动和受迫振动方程后,通过这三个方程,我们可以用高等数学的方法求出这三个方程的通解。
同时,我们可以用Matlab的计算功能求出它们的通解。
这三个方程的通解表示振子位移随时间的变化情况。
我们得到的这三个方程,前两个为二阶常系数线性齐次微分方程,第三个为二阶常系数非齐次微分方程。
根据这三个方程,我们可以通过Matlab Simulink中的各种模块模拟弹簧振子的位移、速度、加速度,再添加一个平方模块,设置好系数,就可以模拟振子动能、势能、机械能,用线连接各模块,这样流程图就做好了。
设置好各模块的参数后,再设置好系统环境变量,点击运行,通过示波器模块就可以模拟出相应的图像曲线[3]。
图像的横坐标均表示时间,纵坐标相应为位移、速度、加速度、动能、势能、机械能。
图像表示这些物理量随时间变化关系。
通过这三种情况方程的通解,我们可以分析振子位移随时间变化情况,再和模拟出的图像对比分析。
对方程通解求一阶导,就可以得到振子速度随时间变化关系,分析出速度随时间变化情况,再和模拟出的图像对比分析。