Simulink机械振动仿真
- 格式:ppt
- 大小:3.70 MB
- 文档页数:99
基于Simulink的振动模态分析引言振动模态分析是一种常用的工程分析方法,用于研究结构体在不同频率下的振动特性和模态。
本文将介绍如何使用Simulink软件进行振动模态分析。
Simulink简介Simulink是一种基于模型的设计和仿真工具,常用于解决动态系统建模和仿真问题。
该软件提供了丰富的工具箱,便于用户搭建模型和进行模拟实验。
振动模态分析步骤1. 结构体建模:首先,需要将待分析的结构体进行建模。
在Simulink中,可以使用各种元件来描述结构体的物理特性,例如质量、弹性等参数。
2. 模态分析设置:在建模完成后,可以设置模态分析的参数,包括分析频率范围、模态数量等。
这些参数会影响模态分析的精度和计算效率。
3. 模型求解:通过在Simulink中运行模型求解器,可以得到结构体在不同频率下的振动模态。
求解过程可以得到每一个模态对应的频率、振型和阻尼比等信息。
4. 结果分析:最后,可以对求解得到的振动模态进行进一步分析和可视化。
比如,可以绘制模态频率与振型的关系图,用于评估结构体的振动特性。
模态分析应用领域振动模态分析在工程领域有着广泛的应用。
它可以帮助工程师了解结构体的固有振动特性,从而优化设计和改进结构体的性能。
在航空航天、汽车工程、建筑设计等领域,振动模态分析被广泛应用于结构体的优化和故障诊断。
结论通过Simulink软件进行振动模态分析是一种简单而高效的方法。
它可以帮助工程师更好地理解结构体的振动特性,并在实际工程项目中起到重要作用。
在使用Simulink进行振动模态分析时,合理设置参数和精确分析结果对于获得准确的振动特性信息尤为重要。
基于Matlab/Simulink的多自由度机械振动系统仿真作者:曾德惠, 黄松和, ZENG De-hui, HUANG Song-he作者单位:曾德惠,ZENG De-hui(湖北民族学院,理学院,湖北,恩施,445000;西南交通大学,机械工程学院,四川,成都,610031), 黄松和,HUANG Song-he(西南交通大学,机械工程学院,四川,成都,610031)刊名:湖北民族学院学报(自然科学版)英文刊名:JOURNAL OF HUBEI INSTITUTE FOR NATIONALITIES(NATURAL SCIENCES EDITION)年,卷(期):2008,26(1)被引用次数:1次1.郝桐生理论力学 20032.李兴玮.邱晓刚计算机仿真技术基础 20063.蒋志峰.楼易用 MATLAB进行单自由度系统机械振动试验[期刊论文]-力学与实践 2004(03)4.杨立主计算机控制与仿真技术 20035.王积伟.吴振顺控制工程基础 20016.商大中.李宏亮.韩广才结构动力分析 20057.沈辉精通SIMULINK系统仿真与控制 20038.王文娟机械振动分析的Matlab/Simulink 仿真研究[期刊论文]-现代电子技术 2006(24)9.欧进萍结构振动控制-主动、半主动和智能控制 200310.薛定宇.陈阳泉基于Matlab/Simulink的系统仿真技术与应用 200211.刘明精通Matlab7 20061.曾德惠粘滞阻尼器被动振动控制仿真研究[期刊论文]-湖北民族学院学报(自然科学版) 2009(2)本文链接:/Periodical_hbmzxyxb-zrkx200801017.aspx。
山东大学Matlab 课程作业学院:机械工程学院专业:姓名:学号:基于Simulink仿真得振动学问题解决实例1.单自由度无阻尼自由振动仿真表达式:仿真框图:参数设置:k=100N/m m=4kg初始状态:初速度为0 初始位移为5仿真结果:2.简谐波形得里沙茹图形分析仿真框图:参数设置:K=100m=4→rad/sSin wave参数设置:Amplitude1 ;Frequency 5 1015初始状态:①→φ=②→φ=③=1,=5→φ=45;④=1,=−5→φ=135;⑤=0,=−1→φ=180XY Graph参数x-min -2;x-max 2;y-min—2; y-max 2Frequency 5时仿真结果:Frequency 10时仿真结果:Frequency 15时仿真结果:3.单自由度有阻尼自由振动表达式:仿真框图:参数设置:ﻫ令k=100,m=10,c=10 初始状态:ﻫ初始速度为0,位移为1仿真结果:4、衰减振荡得阻尼比得估计参数:k=100,m=10,c=2初始条件:x0=1,v0=0仿真图框:初始振幅为1,约7个周期时衰减为0、25,对数减幅:δ=(ln4)/7≈0、099阻尼比§≈δ/2≈0、032理论值§=0、5c(km)−0、5≈0、0325、单自由度有阻尼+正弦激励表达式:令激励则方程变形为参数设置:令k=4,m=1,c=0、2初始状态:ﻫ初始速度为0,位移为0、05 仿真框图:仿真结果:6、利用速度共振得里沙茹图进行固有频率与阻尼系数分析仿真框图:改变激励频率:=1、2;1、6;1、8;1、9;1、95;2;2、05;2、1;2、2等7、两自由度无阻尼系统自由振动表达式:参数设置:m1=1,m2=2 k1=1,k2=1,k3=2初始状态:①速度0,m1、m2位移均为1②速度0,m1位移1,m2位移−0、5③速度0,m1位移1,m2位移0 仿真结果:①②③。
基于Simulink的轻型汽车振动仿真将轻型汽车结构简化成二自由度振动模型,并以此模型为例,在用简谐激励模拟路面激励的情况下,以广义拉格朗日方程建立动力学方程,并基于Simulink 对轻型汽车动力学方程进行处理和仿真,通过设定不同的参数,得到不同情况下各位移的仿真结果,分析计较后得出该模型的仿真结果对汽车动参数方面的优化设计有一定的参考价值。
标签:振型;Simulink仿真;优化设计前言Simulink是用来进行动态系统建模、仿真和分析的软件包,它提供了大量仿真元件库,可以非常方便地搭建、分析和仿真各种动态系统,包括连续系统、离散系统和混合系统。
由于它功能强大、使用方便,目前在许多领域得到了广泛应用[1]。
汽车动力学模型由车身、轮胎、悬架、人体座椅系统4个部分组成。
有很多人对模型进行了简化及分析,如,孙阳敏对八自由度人-车-路耦合模型振动[2]進行了分析,但分析过程较为复杂,任宁宁等基于AMESim对矿用汽车六自由度的平顺性动力学模型进行了研究[3],杨鑫基于Matlab对两自由度1/4车辆悬架模型动态特性进行了分析[4],文章基于Simulink,以简谐激励模拟路面不平整度,通过简化汽车模型,研究系统不同参数下车辆的振动响应和振动特性,为汽车参数的优化设计提供一定的参考。
1 轻型汽车的动力学模型1.1 自由度动力学模型汽车模型的简化多种多样,在这里做如下假设:(1)将汽车车身看成一个刚体;(2)汽车关于其纵轴线对称;(3)忽略轮胎阻尼;(4)忽略车身的水平位移;(5)系统为线性系统;(6)忽略车轮质量和刚度。
根据以上假设我们把复杂的汽车模型简化成平面的二自由度模型,如图1所示。
图1 汽车二自由度系统模型图1中,m为车身质量;m1,m2为车身质量按比例分配给前后悬架的质量;k1,k2为前后悬架刚度系数;c1,c2为前、后悬架阻尼系数;a,b为前、后车轮轴到质心的距离;z、θ分别为m对应的铅垂位移和俯仰角;Xs1,Xs2为前、后轮路面激励。
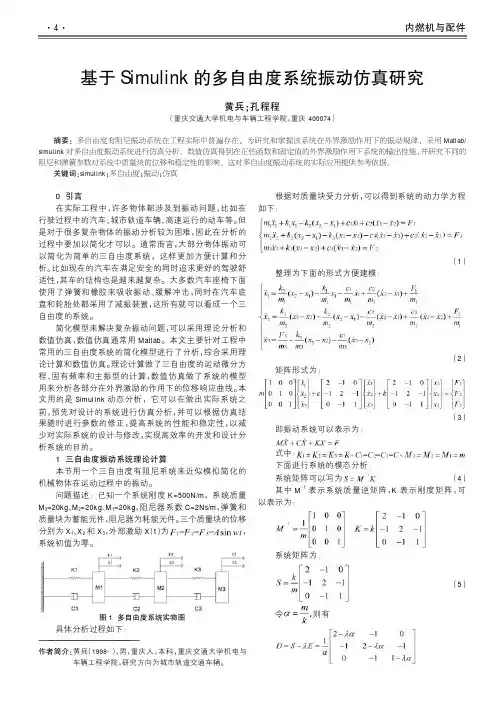
0引言在实际工程中,许多物体都涉及到振动问题,比如在行驶过程中的汽车、城市轨道车辆、高速运行的动车等。
但是对于很多复杂物体的振动分析较为困难,因此在分析的过程中要加以简化才可以。
通常而言,大部分物体振动可以简化为简单的三自由度系统,这样更加方便计算和分析。
比如现在的汽车在满足安全的同时追求更好的驾驶舒适性,其车的结构也是越来越复杂。
大多数汽车座椅下面使用了弹簧和橡胶来吸收振动、缓解冲击,同时在汽车底盘和轮胎处都采用了减振装置,这所有就可以看成一个三自由度的系统。
简化模型来解决复杂振动问题,可以采用理论分析和数值仿真,数值仿真通常用Matlab 。
本文主要针对工程中常用的三自由度系统的简化模型进行了分析,综合采用理论计算和数值仿真。
理论计算做了三自由度的运动微分方程、固有频率和主振型的计算,数值仿真做了系统的模型用来分析各部分在外界激励的作用下的位移响应曲线。
本文用的是Simulink 动态分析,它可以在做出实际系统之前,预先对设计的系统进行仿真分析,并可以根据仿真结果随时进行参数的修正,提高系统的性能和稳定性,以减少对实际系统的设计与修改,实现高效率的开发和设计分析系统的目的。
1三自由度振动系统理论计算本节用一个三自由度有阻尼系统来近似模拟简化的机械物体在运动过程中的振动。
问题描述:已知一个系统刚度K=500N/m ,系统质量M 3=20kg 、M 2=20kg 、M 1=20kg ,阻尼器系数C=2Ns/m ,弹簧和质量块为蓄能元件,阻尼器为耗能元件。
三个质量块的位移分别为X 1、X 2和X 3,外部激励X (t )为,系统初值为零。
图1多自由度系统实物图具体分析过程如下:根据对质量块受力分析,可以得到系统的动力学方程如下:(1)整理为下面的形式方便建模:(2)矩阵形式为:(3)即振动系统可以表示为:式中:、、下面进行系统的模态分析:系统矩阵可以写为(4)其中M -1表示系统质量逆矩阵,K 表示刚度矩阵,可以表示为:系统矩阵为:(5)令,则有———————————————————————作者简介:黄兵(1998-),男,重庆人,本科,重庆交通大学机电与车辆工程学院,研究方向为城市轨道交通车辆。
基于Simulink的机械振动系统仿真
席平原
【期刊名称】《机床与液压》
【年(卷),期】2005(000)006
【摘要】通过列举一些实例,分析了Matlab/Simulink软件在二自由度机械振动系统仿真中的应用,不但大大地提高了编程的效率,而且提高了编程的质量和可靠性,取得了很好的效果.
【总页数】2页(P175-176)
【作者】席平原
【作者单位】淮海工学院机械系,江苏,连云港,222001
【正文语种】中文
【中图分类】TP312
【相关文献】
1.基于Matlab/Simulink的多自由度机械振动系统仿真 [J], 曾德惠;黄松和
2.基于系统仿真的旋转机械振动故障诊断方法 [J], 庄莉莉
3.基于MATLAB and Simulink的波浪能装置液压能量转换系统仿真研究 [J], 叶寅;盛松伟;乐婉贞;王坤林;张亚群
4.基于Matlab/Simulink风电机组测试平台液压加载系统仿真研究 [J], 朱怡;孙渊;陈国初
5.基于Simulink的多自由度机械振动系统仿真 [J], 匡伟春;张柏清;张传才
因版权原因,仅展示原文概要,查看原文内容请购买。
使用MATLAB—SIMULINK仿真简谐振动物理实验作者:王兆旭来源:《科技风》2016年第22期摘要:本文介绍了用Simulink对简谐振动和阻尼振动物理实验进行仿真的方法。
仿真出了位移、速度等振动曲线;并完成了振动过程中的动能、势能以及机械能进行监测。
实现了用Simulink仿真物理实验的目的。
关键词:简谐振动;实验仿真;SimulinkSimulink是美国MathWorks公司出品的商业数学软件MATLAB最重要的组件之一,它无需大量书写程序,只需要通过简单直观的鼠标操作,就可组建复杂的系统,完成一个动态系统建模、仿真和综合分析,已经被应用于数字信号和控制理论的大量仿真和设计。
将Simulink仿真精细、贴近实际、效率高的优点运用到物理实验的模拟中去,可以直观、客观、生动地仿真物理实验,更好地理解物理规律。
一、简谐振动及其数学模型简谐振动是最简单最基本的振动,其振动过程关于平衡位置对称,它是一种往复运动。
质点的位移和时间的关系遵从正弦函数的规律,它的振动图像(x-t图像)是一条正弦曲线的图像。
见图1。
振幅A、频率f(或角频率ωn)、φ初相位,称为简谐振动三要素。
可见速度和加速度也是按正(余)弦规律随时间变化,三者只是相位和幅值不同。
对于简谐振子,其动能m2和势能kx2之和为一常量,即系统的总机械能守恒。
在振动过程中,动能和势能不断相互转化。
若考虑摩擦阻尼,振动会逐步衰减,机械能全部转变为热能逸散。
二、Simulink仿真(一)位移、速度、加速度模型及仿真打开Simulink Library Browser,单击“新建”按钮,选取相应模块,建立仿真程序框图,见附图2。
将Subtract模块中的Listofsigns改为“-”,表示力的方向始终与运动的方向相反;Intergrator模块表示加速度、速度和位移的微积分关系;将弹性系数Gain的值设为0.4,阻尼系数Gain设为0。
3个scope模块分别显示运动距离、运动速度和加速度。
0引言碾压不足,设计的密实度达不到要求,结果将会导致返工或工程质量低劣;碾压遍数过多,既不经济又会使压实度降低,还增加工程技术人员的劳动强度。
因此必须对压实过程进行实时监测,有效地避免欠压和过压的发生,从而得出最佳的压实效果。
本文采用加速度传感器,利用MATLAB/SIMULINK对振动压路机进行仿真,得到一种连续测量路基压实度的方法,并通过实验来验证该方案的可行性。
1研究方法把加速度传感器安装到振动压路机振动轴上,采集振动轮的垂直方向上的振动加速度,利用MATLAB/SIMULINK,再应用数理统计理论,编写出具有一定置信度的推断软件,将实测加速度值与固化在系统中的标准数据对比,形成内置专家系统,通过运算、分析,便可以得到路基的压实度。
2研究步骤2.1现场实验所需主要设备有:16t振动压路机1台、ICP加速度传感器、数据采集仪、笔记本电脑等。
先把加速度传感器安装到振动轴或最能反映振动轮振动情况的位置上(安装前一定要把安装面磨平),随后把数据传输线接到采集仪ICP接口上,再把笔记本电脑与采集仪用网线连接好,在电脑中打开数据采集软件,准备采集(图1)。
2.2理论分析选取轮胎驱动振动压路机为典型机型,列出并分析“压路机-土”振动系统的运动方程,两自由度的数学模型为(多自由度模型分析思路与此相同)[1]m22+(c1+c2)2+(k1+k2)x2-c11-k1x1=F0sinωt(1)m11+c11+k1x1-c12-k1x2=0(2)基于MATLAB/SIMULINK的振动压路机模型的仿真钱锦武(云南交通职业技术学院,机械工程系,云南!昆明!650101)摘要:为了研究振动压路机的工作特性,探索路基压实度的检测方法,采用置于振动压路机振动轴上的加速度传感器来间接测量路基压实度,利用MATLAB/SIMULINK对压路机进行仿真,并验证了方案的可行性。
关键词:MATLAB/SIMULINK;振动压路机;压实度;仿真中图分类号:U415.521文献标识码:B文章编号:1000-033X(2007)07-0050-03Vibro-rollerModelSimulationBasedonMATLAB/SIMULINKQIANJin-wu(DepartmentofMechanicalEngineering,YunnanCommunication&TechnologyCollege,Kunming650101,Yunnan,China)Abstract:Inordertostudytheworkingcharacteristicsofvibro-roller,roadbedcompactnessmeasuringmeth-odsarediscussed.Thisarticleusesputsinthevibro-rollertoinspireonthemovingaxistheaccelerationin-strumenttocometheindirectsurveyroadbedcompactness,andcarriesonthesimulationusingMATLAB/SIMULINKtothebulldozer,andhasconfirmedtheplanfeasibility,willprovideoneforthenextroadbedcompactnessexaminationtohavethesignificancereference.Keywords:MATLAB/SIMULINK;vibro-roller;compactness;simulation图1ICP加速度传感器的安装位置压实机械与施工技术CompactionMachinery&ConstructionTechnology50F0=Meω2(3)(1)在模型中,土是具有一定刚度的弹塑性体。
基于Simulink的多自由度机械振动系统仿真
匡伟春;张柏清;张传才
【期刊名称】《煤矿机械》
【年(卷),期】2007(28)12
【摘要】针对多自由度机械振动问题,以弹簧质量系统、轴上带有若干圆盘的扭转振动系统和梁上有集中质量的横向振动系统为例,详细介绍在Matlab/Simulink平台上利用状态空间法进行多自由度系统仿真的方法及步骤,并对仿真结果进行了分析。
【总页数】4页(P54-57)
【关键词】多自由度;机械振动;Simulink;仿真;状态空间
【作者】匡伟春;张柏清;张传才
【作者单位】景德镇陶瓷学院;西安建筑科技大学
【正文语种】中文
【中图分类】TP391;TH113.1
【相关文献】
1.基于Simulink的机械振动系统仿真 [J], 席平原
2.基于Matlab/Simulink的多自由度机械振动系统仿真 [J], 曾德惠;黄松和
3.基于Simulink的多自由度系统振动仿真研究 [J], 黄兵;孔程程
4.基于Simulink的多自由度系统振动仿真研究 [J], 黄兵;孔程程
5.基于ADAMS与Simulink的六自由度摇摆台系统联合仿真研究 [J], 陈勇军;韩霄翰;张炎;张海坤
因版权原因,仅展示原文概要,查看原文内容请购买。
基于MATLABSimulink的机械系统仿真技术基于 MATLAB/Simulink 的机械系统仿真技术在当今科技飞速发展的时代,机械系统的设计和优化变得日益复杂。
为了更高效、准确地预测和分析机械系统的性能,基于MATLAB/Simulink 的机械系统仿真技术应运而生。
这项技术为机械工程师和研究人员提供了强大的工具,帮助他们在实际制造之前,就能对机械系统的行为有深入的了解和准确的预测。
机械系统仿真技术的核心在于通过建立数学模型来模拟真实世界中机械系统的运行。
而 MATLAB/Simulink 作为一款功能强大的数学计算和建模软件,为实现这一目标提供了丰富的资源和便捷的操作环境。
首先,让我们来了解一下 MATLAB/Simulink 的一些基本特点。
MATLAB 具有强大的数值计算和数据分析能力,能够处理复杂的数学公式和算法。
Simulink 则是一个基于图形化的建模环境,用户可以通过拖拽和连接各种模块来构建系统模型,这种直观的操作方式大大降低了建模的难度,提高了工作效率。
在机械系统仿真中,常见的模型类型包括刚体动力学模型、柔性体模型、传动系统模型等。
以刚体动力学模型为例,我们可以使用牛顿定律和欧拉方程来描述物体的运动。
通过在 Simulink 中定义质量、惯性矩、力和力矩等参数,以及它们之间的关系,就能模拟出刚体的运动轨迹和受力情况。
对于复杂的机械系统,如汽车的悬挂系统,不仅需要考虑刚体的运动,还需要考虑弹性元件和阻尼器的特性。
这时,就可以引入柔性体模型。
通过有限元分析等方法,可以将柔性体的模态信息导入到Simulink 中,与刚体模型相结合,从而更真实地反映系统的动态特性。
传动系统也是机械系统中的重要组成部分。
例如,齿轮传动系统的建模需要考虑齿轮的齿数、模数、压力角等参数,以及齿面接触和摩擦等因素。
在 MATLAB/Simulink 中,可以使用专门的模块来构建齿轮传动模型,并与其他部件的模型进行集成,以分析整个传动系统的性能。