张正友相机标定算法
- 格式:ppt
- 大小:656.50 KB
- 文档页数:10
张正友标定法是相机标定中常用的一种方法,通过该方法可以实现相机内外参数的标定。
在使用张正友标定法进行相机标定时,需要编写相应的matlab代码来实现算法。
下面将介绍如何使用matlab实现张正友标定法,并给出相应的matlab代码。
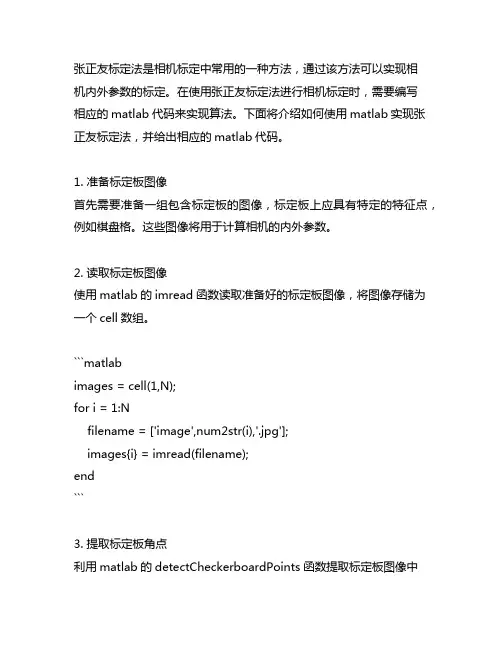
1. 准备标定板图像首先需要准备一组包含标定板的图像,标定板上应具有特定的特征点,例如棋盘格。
这些图像将用于计算相机的内外参数。
2. 读取标定板图像使用matlab的imread函数读取准备好的标定板图像,将图像存储为一个cell数组。
```matlabimages = cell(1,N);for i = 1:Nfilename = ['image',num2str(i),'.jpg'];images{i} = imread(filename);end```3. 提取标定板角点利用matlab的detectCheckerboardPoints函数提取标定板图像中的角点坐标,将提取的角点保存到一个cell数组中。
```matlabimagePoints = cell(1, N);for i = 1:NI = images{i};[imagePoints{i}, boardSize] = detectCheckerboardPoints(I); end```4. 标定相机参数使用matlab的estimateCameraParameters函数对提取的角点进行相机参数标定,得到相机的内外参数。
```matlab[cameraParams, imagesUsed, estimationErrors] = estimateCameraParameters(imagePoints, worldPoints,'EstimateSkew', true, 'EstimateTangentialDistortion', true);```5. 查看标定结果可以利用标定得到的相机参数对新的图像进行矫正,并查看标定结果的精度。
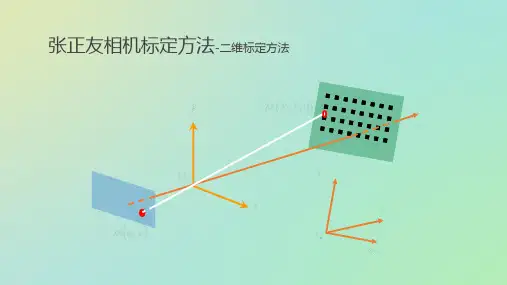
张正友标定法原理及实验
接坐标系的转换原理,研究了经典标定⽅法 — 张定友标定法
1. 标定原理
将标定棋盘格放在不同位置和⾓度进⾏拍摄,采集的图⽚数不少于 3 张,⼀般选⽤15张左右。
1. 先通过图像处理获得棋盘格的⾓点,设其像素坐标为,设其世界坐标为X,Y,1,设 K 为相机内参矩阵,r__1_,r__2,_r__3和t分别为相机坐标系相对于世界坐标系的旋转矩阵和平移向量,棋盘格到图像平⾯的单应性变换为:
其中设定的相机内参矩阵,单应性矩阵
2. 根据旋转矩阵的性质:和,可以得出内参矩阵 K的约束条件,因为内参数矩阵有 5 个未知数,当采集的标定图⽚数⽬≥3 时即可求出内参矩阵 K 。
3. 再根据内部参数与映射矩阵求出每幅采集的标定板图像相对于基准图像的旋转矩阵R 与平移向量 t ,即外参矩阵的参数。
对求得的参数根据极⼤似然原则进⾏优化,求出极⼤似然估计值。
4. 将每张图像的控制点根据求解的参数重投影回三维空间,最⼩化与真实值的差异,建⽴⾮线性最⼩化模型,⽤LM(Levenberg-Marquardt)迭代算法优化参数。
2. 具体实验步骤
1、打印⼀张模板并贴在⼀个平⾯上;
2、从不同⾓度拍摄若⼲张模板图像;
3、检测出图像中的特征点;
4、求出摄像机的内参数;
5、求出畸变系数;
6、优化求值。
相机标定算法的源代码相机标定是计算机视觉领域中的一项重要技术,它用于确定相机的内部参数和外部参数,以便将相机采集到的图像转换为真实世界的坐标。
在计算机视觉和机器人领域中,相机标定是一项关键工作。
相机标定的主要目的是确定相机的内参矩阵(包括焦距、主点位置等)和外参矩阵(包括相机的位置和方向)。
通过相机标定,我们可以校正图像畸变并获得准确的三维坐标。
相机标定算法的本质是寻找一个数学模型来描述相机成像过程。
其中,最常用的相机标定算法是张正友标定算法(Zhang'scalibration algorithm)。
该算法基于已知的二维图像和三维世界点之间的对应关系,通过最小化重投影误差来估计相机的内外参数。
具体而言,张正友标定算法首先需要采集一组已知的二维图像和对应的三维世界点。
然后,通过对这些对应点进行特征提取和匹配,可以得到相机坐标系下的图像坐标和世界坐标系下的三维点坐标。
接下来,通过最小二乘法求解相机的内外参数。
在具体实现中,张正友标定算法通常利用棋盘格图案作为标定板,因为棋盘格具有明显的特征点,易于提取和匹配。
在标定过程中,需要在不同的位置和姿态下采集多张棋盘格图像,并提取出角点的二维坐标。
通过这些角点的二维坐标和已知的三维世界坐标,可以使用最小二乘法求解出相机的内外参数。
另外,除了张正友标定算法外,还有其他一些常用的相机标定算法,如Tsai算法和Matlab自带的相机标定工具箱。
这些算法在实现上可能有一些差异,但都基于类似的原理,即通过已知的二维和三维对应关系来求解相机参数。
总结起来,相机标定是计算机视觉中的重要技术之一,它通过寻找数学模型来描述相机成像过程,从而获得准确的相机内外参数。
其中,张正友标定算法是最常用的相机标定算法之一,通过最小化重投影误差来求解相机的内外参数。
在实际应用中,相机标定算法可以用来校正图像畸变、恢复三维场景的几何结构等,具有广泛的应用前景。
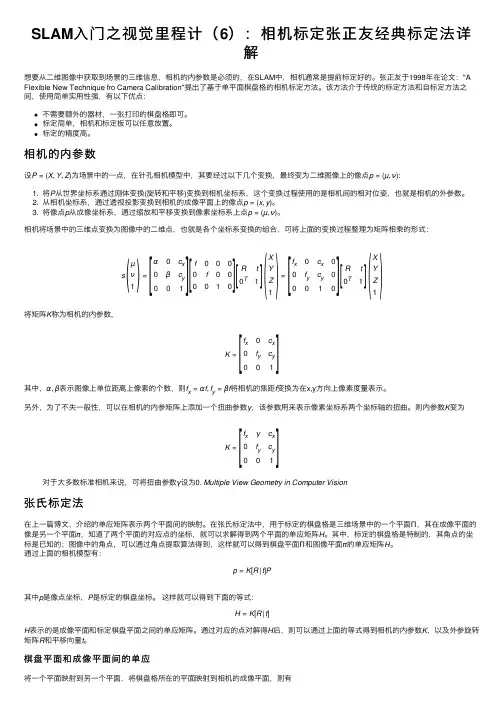
SLAM ⼊门之视觉⾥程计(6):相机标定张正友经典标定法详解想要从⼆维图像中获取到场景的三维信息,相机的内参数是必须的,在SLAM 中,相机通常是提前标定好的。
张正友于1998年在论⽂:"A Flexible New Technique fro Camera Calibration"提出了基于单平⾯棋盘格的相机标定⽅法。
该⽅法介于传统的标定⽅法和⾃标定⽅法之间,使⽤简单实⽤性强,有以下优点:不需要额外的器材,⼀张打印的棋盘格即可。
标定简单,相机和标定板可以任意放置。
标定的精度⾼。
相机的内参数设P =(X ,Y ,Z )为场景中的⼀点,在针孔相机模型中,其要经过以下⼏个变换,最终变为⼆维图像上的像点p =(µ,ν):1. 将P 从世界坐标系通过刚体变换(旋转和平移)变换到相机坐标系,这个变换过程使⽤的是相机间的相对位姿,也就是相机的外参数。
2. 从相机坐标系,通过透视投影变换到相机的成像平⾯上的像点p =(x ,y )。
3. 将像点p 从成像坐标系,通过缩放和平移变换到像素坐标系上点p =(µ,ν)。
相机将场景中的三维点变换为图像中的⼆维点,也就是各个坐标系变换的组合,可将上⾯的变换过程整理为矩阵相乘的形式:s µν1=α0c x 0βc y1f 0000f 0001R t 0T1X Y Z1=f x 0c x 00f yc y 001Rt 0T1X Y Z1将矩阵K 称为相机的内参数,K =f x0c x 0f yc y 001其中,α,β表⽰图像上单位距离上像素的个数,则f x =αf ,f y =βf 将相机的焦距f 变换为在x,y ⽅向上像素度量表⽰。
另外,为了不失⼀般性,可以在相机的内参矩阵上添加⼀个扭曲参数γ,该参数⽤来表⽰像素坐标系两个坐标轴的扭曲。
则内参数K 变为K =f xγc x 0f yc y 01对于⼤多数标准相机来说,可将扭曲参数γ设为0. Multiple View Geometry in Computer Vision张⽒标定法在上⼀篇博⽂,介绍的单应矩阵表⽰两个平⾯间的映射。
张正友标定方法引言标定(calibration)是计算机视觉领域中重要的任务之一,广泛应用于三维重建、增强现实、机器人导航等领域。
在标定过程中,我们需要确定摄像机的内参和外参,以便把图像坐标转换到真实世界坐标。
张正友标定方法(Zhang’s calibration method)是一种常用的摄像机标定方法,被广泛应用于计算机视觉领域中。
张正友标定方法概述张正友标定方法基于相机投影方程,通过观察已知的图像特征点和世界坐标系下的点对,实现摄像机的内参和外参的估计。
具体步骤如下:1.收集标定板图像:首先需要收集包含已知世界坐标系下特征点的标定板图像。
标定板通常是一个黑白棋盘格,由若干个方格组成。
2.提取特征点:使用图像处理方法(例如角点检测算法)提取每幅标定板图像中的特征点。
特征点通常是棋盘格的角点。
3.计算图像特征点的图像坐标和世界坐标系下的点对:对于每个特征点,我们已知它在图像中的像素坐标,同时已知对应的世界坐标系下的点(通常为平面上的点)。
4.标定摄像机内参:根据图像特征点的像素坐标和世界坐标系下的点对,通过最小二乘法或其他优化方法,估计摄像机的内参矩阵,包括焦距、主点和畸变等参数。
5.标定摄像机外参:对于每个标定板图像,通过求解相机投影方程,估计摄像机的外参矩阵,包括旋转矩阵和平移向量。
6.优化标定结果:通过重投影误差最小化等方法,优化标定结果,提高标定的准确性。
张正友标定方法的优势张正友标定方法相比其他标定方法具有以下优势:1.简单易实现:张正友标定方法的步骤相对简单,只需要一些基本的图像处理和优化算法即可。
在实际应用中,我们可以使用开源的计算机视觉库(如OpenCV)来实现。
2.准确性高:张正友标定方法在提取特征点和估计摄像机参数的过程中引入了一些优化方法,可以提高标定的准确性。
3.鲁棒性强:张正友标定方法对于一些噪声和异常值具有一定的鲁棒性,可以应对一些实际场景中的干扰因素。
使用张正友标定方法的注意事项在使用张正友标定方法时,我们需要注意以下事项:1.标定板的选择:标定板的选择应根据实际应用场景来确定。
9点标定算法摘要:一、引言二、9点标定算法原理1.相机内参2.相机外参3.标定过程三、9点标定算法步骤1.准备标定图像2.检测角点3.计算相机矩阵4.计算畸变系数5.验证标定结果四、应用场景五、总结正文:一、引言随着计算机视觉技术的不断发展,相机标定技术在许多领域得到了广泛应用。
其中,9点标定算法作为一种简单且实用的标定方法,被广泛应用于计算机视觉和机器人领域。
本文将对9点标定算法进行详细介绍,包括其原理、步骤以及应用场景。
二、9点标定算法原理9点标定算法是基于张正友标定法的改进版,主要用于求解相机的内部参数和外部参数。
该算法主要涉及以下三个部分:1.相机内参:包括焦距、主点坐标和畸变系数等参数。
2.相机外参:包括旋转矩阵和平移矩阵,用于描述相机在空间中的位置和姿态。
3.标定过程:通过拍摄一系列标定图像,利用角点检测算法提取角点,进而求解相机参数。
三、9点标定算法步骤9点标定算法的具体步骤如下:1.准备标定图像:拍摄一组包含棋盘格的图像,要求棋盘格在图像中占比较大,以便于角点检测。
2.检测角点:采用角点检测算法(如SIFT、SURF等)提取图像中的角点。
一般选取具有代表性的9个角点(其中一个角点为原点,其他8个角点分布在以原点为中心的方形区域内)。
3.计算相机矩阵:根据选取的9个角点,利用三角测量原理求解相机矩阵(包括焦距、主点坐标等)。
4.计算畸变系数:利用标定图像中的直线段,通过最小二乘法求解畸变系数。
5.验证标定结果:利用标定后的相机参数拍摄一张新图像,然后通过角点检测算法提取角点,与实际角点进行对比,验证标定结果。
四、应用场景9点标定算法广泛应用于计算机视觉、机器人、自动驾驶等领域。
例如,在机器人视觉中,通过9点标定算法求解相机参数,可以实现精确的定位和导航;在自动驾驶领域,9点标定算法有助于提高激光雷达、摄像头等传感器的精度,从而提高驾驶安全性。
五、总结9点标定算法作为一种实用且简便的相机标定方法,在计算机视觉领域具有广泛的应用价值。
opencv 张正友标定法原理
OpenCV张正友标定法原理
张正友标定法是计算机视觉领域中用于相机标定的一种常见方法。
其原理基于相机的内外参数模型,通过拍摄一系列已知位置的校准板图像,以推断相机的畸变参数和相机矩阵。
相机的内参数包括焦距、主点位置等,而外参数则指相机的姿态参数,比如旋转矩阵和平移向量。
相机畸变参数用于描述相机光学系统的非线性特性,例如径向畸变和切向畸变。
在进行张正友标定法时,首先需要准备一个校准板,通常采用黑白棋盘格。
校准板具有已知尺寸的特点,因此可以用来计算相机的内外参数。
在标定过程中,校准板被摆放在多个不同位置和姿态下,相机将拍摄一系列校准板图像。
对于每张图像,需要通过图像处理技术来检测校准板的角点,通常使用角点检测算法来实现。
检测到校准板的角点后,可以利用这些已知的图像点和校准板上的真实三维点之间的对应关系,进行相机的标定。
通过最小化重投影误差,即真实三维点和对应的图像点之间的距离,可以求解出相机的内参数和外参数。
张正友标定法的优势在于只需要使用一张校准板图像即可进行标定,而其他方法可能需要多张校准板图像。
同时,这种方法对于校准板的尺寸和姿态变化相对宽松,能够适应不同场景和标定需求。
总结而言,张正友标定法利用已知尺寸的校准板图像和相机拍摄的标定图像,通过计算相机的内外参数,实现相机的标定。
这种方法广泛应用于计算机视觉、机器人技术和增强现实等领域,为图像处理和计算机视觉算法的准确性提供了重要保证。
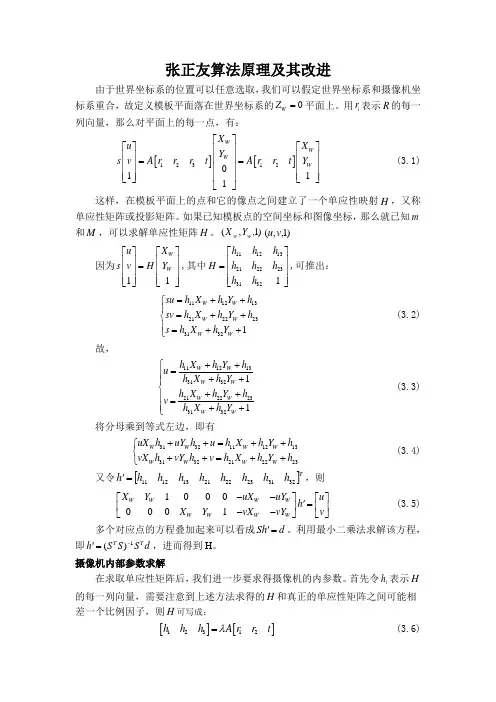
张正友算法原理及其改进由于世界坐标系的位置可以任意选取,我们可以假定世界坐标系和摄像机坐标系重合,故定义模板平面落在世界坐标系的0W Z =平面上。
用i r 表示R 的每一列向量,那么对平面上的每一点,有:[][]123120111W W W W X u X Y s v A r r r t A r r t Y ⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦(3.1) 这样,在模板平面上的点和它的像点之间建立了一个单应性映射H ,又称单应性矩阵或投影矩阵。
如果已知模板点的空间坐标和图像坐标,那么就已知m 和M ,可以求解单应性矩阵H 。
)1,,(w w Y X )1,,(v u因为11W W u X s v H Y ⎡⎤⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦,其中11121321222331321h h h H h h h h h ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦,可推出: 11121321222331321W W W W W W su h X h Y h sv h X h Y h s h X h Y =++⎧⎪=++⎨⎪=++⎩(3.2) 故,1112133132212223313211W W W W W W W W h X h Y h u h X h Y h X h Y h v h X h Y ++⎧=⎪++⎪⎨++⎪=⎪++⎩(3.3) 将分母乘到等式左边,即有31321112133132212223W W W W W W W W uX h uY h u h X h Y h vX h vY h v h X h Y h ++=++⎧⎨++=++⎩ (3.4)又令[]Th h h h h h h h h 3231232221131211=',则1000001W W W W WWWW X Y uX uY u h X Y vX vY v --⎡⎤⎡⎤'=⎢⎥⎢⎥--⎣⎦⎣⎦(3.5) 多个对应点的方程叠加起来可以看成Sh d '=。
张氏标定法张正友针对径向畸变问题提出了一个新的求解摄像机内外参数的方法,即张氏标定法,该方法是介于传统标定和自标定之间的一种方法,它只需要摄像机对某个标定板从不同方向拍摄多幅图片,通过标定板上每个特征点和其像平面的像点间的对应关系,即每一幅图像的单应矩阵来进行摄像机的标定,由于该方法模板制作容易,使用方便,成本低,鲁棒性好,准确率高,因此得到了较为广泛的应用【49】。
该算法也属于两步法,摄像机和模板可以自由的移动,不需要知道运动参数。
本文即采用张氏摄像机标定的方法。
(1) 单应矩阵H 的计算由前面所述内容可知,根据摄像机针孔成像模型,可以得到下面的等式:[]⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡11][1321W W W W W W Z Y X t r r r A Z Y X t R A v u s 现在世界坐标系平面置于标定模板所在的平面,即0=W Z 。
则上式可变为如下形式:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡110][121W W W W Y X t r r A Y X t R A v u s 其中,i r 表示旋转矩阵R 的第i 列向量。
令[]TYX M 1~=,[]Tv u m1~=,则上式可简写为:M H m s ~~=其中:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡===1][323123222113121132121h h h h h h h h h h h t r r A H H 即为单应性矩阵。
有M H ms ~~=式子可以推出: ⎪⎩⎪⎨⎧++=++=++=13231232221131211h X h s h Y h X h sv h Y h X h su 从而推得:⎩⎨⎧++=++++=++23222132311312113231h Y h X h v vYh vXh h Y h X h u uYh uXh 令:[]3231232221131211'h h h h h h h h h =则:0'10000001=⎥⎦⎤⎢⎣⎡------h v vYvXYXu uY uX Y X 上式可以看作0'=Sh ,那么矩阵S S T最小特征值所对应的特征向量就是该方程的最小二乘解。
立体相机参数标定方法
一、基于张正友标定法的标定方法
1.准备工作:选择一对合适的标定板,并确定世界坐标系和相机位姿。
2.拍摄标定图片:同时拍摄左右相机对标定板的图片,保证标定板在
两个相机内都有良好的视野范围。
3.预处理:提取标定板上的角点坐标,并将其与世界坐标系对应。
4.标定内参:对左右相机的内参进行标定,通过最小二乘法估计相机
焦距、主点坐标、径向畸变和切向畸变等参数。
5.标定外参:通过对应点的极线约束,求解出相机在世界坐标系下的
位置和朝向。
二、基于极线约束的标定方法
1.准备工作:准备一对立体图像。
2.特征点提取:对左右图像进行特征点提取,例如使用SIFT或SURF
算法。
3.特征点匹配:通过特征点的描述子进行匹配,得到对应点对。
4.极线约束:利用极线几何原理,对匹配点对进行筛选和去除误匹配。
5.射线三角化:将筛选后的匹配点对恢复成3D点。
6.相对姿态估计:通过3D点对和相机内参,求解左右相机间的相对
姿态(平移和旋转)。
7.绝对尺度恢复:通过绝对尺度恢复方法,计算出相机坐标系在世界坐标系下的位置和朝向。
张正友标定方法
张正友标定方法是一种摄像机标定方法,旨在解决相机的畸变问题。
这种方法需要使用一个标定板,标定板上会有一些黑白相间的方格,通过对这些方格进行检测,可以得到相机的内参和外参矩阵。
在使用张正友标定方法时,需要考虑以下几个步骤:
1. 准备标定板。
标定板需要具有一定的尺寸和规则的黑白方格,以便于相机可以对其进行识别。
同时,标定板需要保持平整,以避免影响标定结果。
2. 拍摄标定板。
将标定板放在相机的拍摄范围内,采用不同的角度和距离进行多次拍摄。
需要注意的是,每次拍摄时标定板的位置和角度应该尽量保持一致。
3. 提取标定板角点。
通过对拍摄到的标定板图像进行处理,提取出标定板上的黑白方格的角点位置。
可以使用OpenCV等图像处理库进行实现。
4. 计算内参矩阵。
根据张正友的理论,通过角点的位置计算相机的内参矩阵。
内参矩阵包括相机的焦距、畸变等参数。
5. 计算外参矩阵。
根据标定板在相机坐标系下的位置和方向,计算相机的外参矩阵。
外参矩阵包括相机位置和方向等参数。
通过以上步骤,就可以得到相机的内参和外参矩阵,从而实现对相机的畸变进行校正。
张正友标定方法是一种比较成熟的相机标定方法,在计算精度和实现难度上都有较好的表现。
- 1 -。