张正友相机标定法
- 格式:pptx
- 大小:6.18 MB
- 文档页数:19
张正友标定法是相机标定中常用的一种方法,通过该方法可以实现相机内外参数的标定。
在使用张正友标定法进行相机标定时,需要编写相应的matlab代码来实现算法。
下面将介绍如何使用matlab实现张正友标定法,并给出相应的matlab代码。
1. 准备标定板图像首先需要准备一组包含标定板的图像,标定板上应具有特定的特征点,例如棋盘格。
这些图像将用于计算相机的内外参数。
2. 读取标定板图像使用matlab的imread函数读取准备好的标定板图像,将图像存储为一个cell数组。
```matlabimages = cell(1,N);for i = 1:Nfilename = ['image',num2str(i),'.jpg'];images{i} = imread(filename);end```3. 提取标定板角点利用matlab的detectCheckerboardPoints函数提取标定板图像中的角点坐标,将提取的角点保存到一个cell数组中。
```matlabimagePoints = cell(1, N);for i = 1:NI = images{i};[imagePoints{i}, boardSize] = detectCheckerboardPoints(I); end```4. 标定相机参数使用matlab的estimateCameraParameters函数对提取的角点进行相机参数标定,得到相机的内外参数。
```matlab[cameraParams, imagesUsed, estimationErrors] = estimateCameraParameters(imagePoints, worldPoints,'EstimateSkew', true, 'EstimateTangentialDistortion', true);```5. 查看标定结果可以利用标定得到的相机参数对新的图像进行矫正,并查看标定结果的精度。
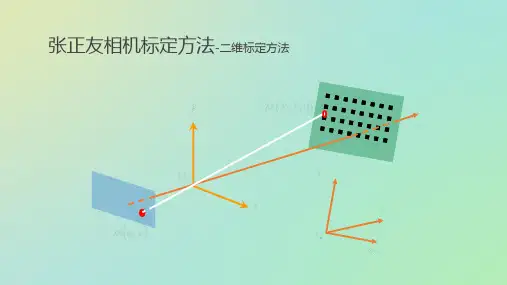
张正友标定法标定过程引言标定是计算机视觉中一项重要的任务,其目的是通过对图像进行处理和分析,确定摄像机的内部参数(如焦距、主点)和外部参数(如旋转矩阵、平移向量),以及相机与世界坐标系的对应关系。
标定的结果可以用于摄像机定位、三维重建、运动捕捉等应用。
张正友标定法是一种经典的标定方法,本文将详细介绍张正友标定法的标定过程。
一、准备标定板首先,需要准备一个黑白相间的标定板。
该标定板上的黑白格子应具有一定的大小和间距,以便于摄像机观测和提取特征点。
标定板应该是平整的,并且材质不能过于反光,以免产生光斑影响标定结果。
二、摄像机采集图像接下来,需要使用摄像机采集一系列至少30张以上的图像。
这些图像应该涵盖尽可能多的摄像机视角和姿态,以保证标定结果的准确性。
在采集图像过程中,需要注意保持摄像机光轴垂直于标定板,以避免图像畸变对标定结果的影响。
三、提取标定板角点在摄像机采集的图像中,需要提取标定板的角点作为特征点。
可以使用图像处理算法(如Canny边缘检测算法)定位标定板的边缘,并通过角点检测算法(如Harris角点检测算法)提取角点。
提取到的角点需要按照从左上角到右下角的顺序进行排序,并保存到一个列表中。
四、计算相机内参数在进行相机标定之前,需要先计算相机的内参数。
相机的内参数主要包括焦距、主点和像素宽度、高度等信息。
为了计算这些参数,需要知道标定板上每个角点的实际坐标。
实际坐标可以通过测量标定板的尺寸得到。
还需要知道摄像机坐标系与世界坐标系的对应关系。
在张正友标定法中,通常使用棋盘格标定板,其中每个黑白格子的实际宽度和高度都可以事先测量得到。
五、计算相机外参数有了相机的内参数后,可以通过张正友标定法计算相机的外参数。
相机的外参数主要包括旋转矩阵和平移向量,它们描述了摄像机坐标系如何变换到世界坐标系。
首先,需要使用摄影测量方法计算出相机观测到的每个角点在图像中的像素坐标。
然后,可以利用相机的内参数和标定板上角点的实际坐标,通过最小二乘法求解出相机的旋转矩阵和平移向量。
张正友标定方法张正友标定方法是一种常用的相机标定方法,它可以用于计算相机的内部参数和外部参数,从而实现对图像的准确测量和三维重建。
下面将详细介绍张正友标定方法的原理和步骤。
一、原理张正友标定方法基于相机成像原理,通过对已知大小的标定板进行拍摄,从而得到标定板在图像中的像素坐标和实际物理坐标,进而计算出相机的内部参数和外部参数。
其中,内部参数包括相机的焦距、主点坐标和畸变系数,外部参数包括相机的旋转矩阵和平移向量。
二、步骤1. 准备标定板标定板可以是黑白相间的棋盘格或者其他规则的图案,要求图案清晰、对比度高、边缘锐利,同时要求标定板的大小足够大,以便在不同距离和角度下进行拍摄。
2. 拍摄标定板将标定板放置在平面上,保持相机与标定板垂直,同时保持相机位置和姿态不变,拍摄多张标定板的照片,要求标定板在不同位置和角度下都有足够的覆盖面积。
3. 提取角点使用图像处理软件对标定板的照片进行处理,提取出标定板上每个方格的角点坐标,要求角点坐标的提取精度高、稳定性好。
4. 计算内部参数根据相机成像原理,将标定板上每个角点的像素坐标和实际物理坐标进行对应,利用最小二乘法计算出相机的内部参数,包括焦距、主点坐标和畸变系数。
5. 计算外部参数根据标定板在不同位置和角度下的拍摄照片,利用三维重建算法计算出标定板在相机坐标系下的位置和姿态,进而计算出相机的旋转矩阵和平移向量。
6. 验证标定结果将标定结果应用于实际图像中,进行像素坐标和实际物理坐标的转换,计算出图像中物体的实际尺寸和位置,进而验证标定结果的准确性和稳定性。
三、总结张正友标定方法是一种常用的相机标定方法,它可以实现对相机的内部参数和外部参数的准确计算,从而提高图像的测量和三维重建精度。
在实际应用中,需要注意标定板的选择和摆放、角点的提取精度和稳定性等问题,以保证标定结果的准确性和可靠性。
SLAM ⼊门之视觉⾥程计(6):相机标定张正友经典标定法详解想要从⼆维图像中获取到场景的三维信息,相机的内参数是必须的,在SLAM 中,相机通常是提前标定好的。
张正友于1998年在论⽂:"A Flexible New Technique fro Camera Calibration"提出了基于单平⾯棋盘格的相机标定⽅法。
该⽅法介于传统的标定⽅法和⾃标定⽅法之间,使⽤简单实⽤性强,有以下优点:不需要额外的器材,⼀张打印的棋盘格即可。
标定简单,相机和标定板可以任意放置。
标定的精度⾼。
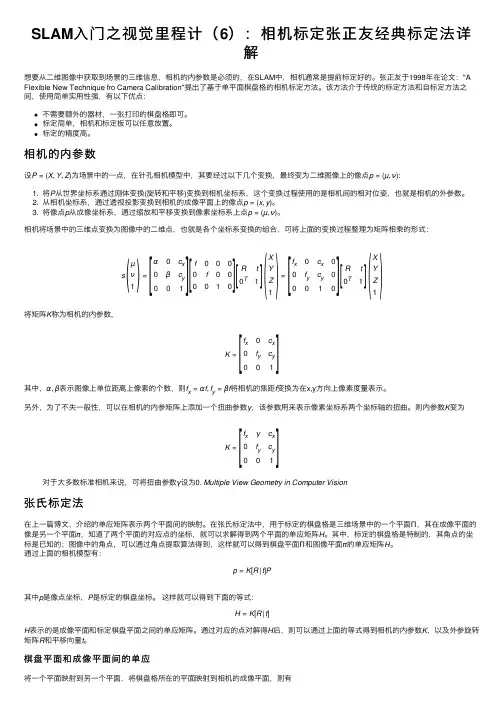
相机的内参数设P =(X ,Y ,Z )为场景中的⼀点,在针孔相机模型中,其要经过以下⼏个变换,最终变为⼆维图像上的像点p =(µ,ν):1. 将P 从世界坐标系通过刚体变换(旋转和平移)变换到相机坐标系,这个变换过程使⽤的是相机间的相对位姿,也就是相机的外参数。
2. 从相机坐标系,通过透视投影变换到相机的成像平⾯上的像点p =(x ,y )。
3. 将像点p 从成像坐标系,通过缩放和平移变换到像素坐标系上点p =(µ,ν)。
相机将场景中的三维点变换为图像中的⼆维点,也就是各个坐标系变换的组合,可将上⾯的变换过程整理为矩阵相乘的形式:s µν1=α0c x 0βc y1f 0000f 0001R t 0T1X Y Z1=f x 0c x 00f yc y 001Rt 0T1X Y Z1将矩阵K 称为相机的内参数,K =f x0c x 0f yc y 001其中,α,β表⽰图像上单位距离上像素的个数,则f x =αf ,f y =βf 将相机的焦距f 变换为在x,y ⽅向上像素度量表⽰。
另外,为了不失⼀般性,可以在相机的内参矩阵上添加⼀个扭曲参数γ,该参数⽤来表⽰像素坐标系两个坐标轴的扭曲。
则内参数K 变为K =f xγc x 0f yc y 01对于⼤多数标准相机来说,可将扭曲参数γ设为0. Multiple View Geometry in Computer Vision张⽒标定法在上⼀篇博⽂,介绍的单应矩阵表⽰两个平⾯间的映射。

张氏标定法张正友针对径向畸变问题提出了一个新的求解摄像机内外参数的方法,即张氏标定法,该方法是介于传统标定和自标定之间的一种方法,它只需要摄像机对某个标定板从不同方向拍摄多幅图片,通过标定板上每个特征点和其像平面的像点间的对应关系,即每一幅图像的单应矩阵来进行摄像机的标定,由于该方法模板制作容易,使用方便,成本低,鲁棒性好,准确率高,因此得到了较为广泛的应用【49】。
该算法也属于两步法,摄像机和模板可以自由的移动,不需要知道运动参数。
本文即采用张氏摄像机标定的方法。
(1) 单应矩阵H 的计算由前面所述内容可知,根据摄像机针孔成像模型,可以得到下面的等式:[]⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡11][1321W W W W W W Z Y X t r r r A Z Y X t R A v u s 现在世界坐标系平面置于标定模板所在的平面,即0=W Z 。
则上式可变为如下形式:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡110][121W W W W Y X t r r A Y X t R A v u s 其中,i r 表示旋转矩阵R 的第i 列向量。
令[]T Y X M 1~=,[]T v u m1~=,则上式可简写为:M H m s ~~=其中:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡===1][323123222113121132121h h h h h h h h h h h t r r A H H 即为单应性矩阵。
有M H ms ~~=式子可以推出: ⎪⎩⎪⎨⎧++=++=++=13231232221131211h X h s h Y h X h sv h Y h X h su 从而推得:⎩⎨⎧++=++++=++23222132311312113231h Y h X h v vYh vXh h Y h X h u uYh uXh 令:[]3231232221131211'h h h h h h h h h =则:0'10000001=⎥⎦⎤⎢⎣⎡------h v vYvXYXu uY uX Y X 上式可以看作0'=Sh ,那么矩阵S S T最小特征值所对应的特征向量就是该方程的最小二乘解。
立体相机参数标定方法
一、基于张正友标定法的标定方法
1.准备工作:选择一对合适的标定板,并确定世界坐标系和相机位姿。
2.拍摄标定图片:同时拍摄左右相机对标定板的图片,保证标定板在
两个相机内都有良好的视野范围。
3.预处理:提取标定板上的角点坐标,并将其与世界坐标系对应。
4.标定内参:对左右相机的内参进行标定,通过最小二乘法估计相机
焦距、主点坐标、径向畸变和切向畸变等参数。
5.标定外参:通过对应点的极线约束,求解出相机在世界坐标系下的
位置和朝向。
二、基于极线约束的标定方法
1.准备工作:准备一对立体图像。
2.特征点提取:对左右图像进行特征点提取,例如使用SIFT或SURF
算法。
3.特征点匹配:通过特征点的描述子进行匹配,得到对应点对。
4.极线约束:利用极线几何原理,对匹配点对进行筛选和去除误匹配。
5.射线三角化:将筛选后的匹配点对恢复成3D点。
6.相对姿态估计:通过3D点对和相机内参,求解左右相机间的相对
姿态(平移和旋转)。
7.绝对尺度恢复:通过绝对尺度恢复方法,计算出相机坐标系在世界坐标系下的位置和朝向。
张氏标定法,也被称为张正友标定法,是由张正友博士在1999年提出的一种相机标定方法。
该方法在技术上具有很高的价值和地位,主要体现在以下几个方面:
实用性和灵活性:张氏标定法采用平面棋盘格作为标定物,相对于传统的三维标定物,更加易于制作和使用。
同时,该方法只需要从多个角度拍摄棋盘格的照片,无需进行复杂的运动或精确的控制,因此具有很高的实用性和灵活性。
精度和鲁棒性:张氏标定法能够在不使用高精度三维标定物的情况下,实现高精度的相机标定。
同时,该方法对于标定物的位置和姿态的要求相对较低,因此具有较好的鲁棒性。
这些优点使得张氏标定法在工业界和学术界得到了广泛的应用。
推动三维计算机视觉的发展:张氏标定法的提出,极大地促进了三维计算机视觉从实验室走向真实世界的进程。
在此之前,由于标定方法的限制,三维计算机视觉技术的应用主要局限于实验室环境。
而张氏标定法的出现,使得该技术能够在更广泛的场景中得到应用,推动了三维计算机视觉的发展。
综上所述,张氏标定法在技术上具有很高的价值和地位,为相机标定技术的发展做出了重要的贡献。
张正友标定法张正友标定法(Zhang's calibration method)是一种常用的相机标定方法,用于确定相机的内参数和畸变参数。
该方法由中国科学院计算技术研究所的研究员张正友于1999年提出,成为了相机标定领域的经典算法之一。
张正友标定法基于相机的针孔模型,将相机的内参数(如焦距、主点坐标、畸变参数等)以及相机与世界坐标系之间的外参数(如旋转矩阵和平移矩阵)进行标定。
它需要使用一组二维的模板图像和对应的三维真实世界坐标,通过计算模板图像上的特征点和真实世界坐标系中的对应特征点之间的关系,最终得到相机的内外参数。
具体而言,张正友标定法的步骤如下:1.收集标定图像:选取至少一个已知的二维模板图像,并准备一个与模板图像对应的三维真实世界坐标系。
2.提取特征点:对于每个标定图像,使用特征点检测算法(如角点检测)提取图像上的特征点。
3.特征匹配和三维-二维关联:通过将提取的特征点与真实世界坐标系中的对应特征点相关联,建立二维和三维特征点的对应关系。
4.相机参数计算:使用最小二乘法或其他优化算法,根据特征点的对应关系计算相机的内参数(如焦距、主点坐标等)和外参数(旋转矩阵和平移矩阵)。
该计算过程需要考虑相机的畸变参数(如径向和切向畸变)。
5.校正和评估:使用得到的相机内外参数对图像进行校正,通过观察校正结果和评估标定误差,可以对相机标定的准确性进行评估和调整。
张正友标定法通过利用多个标定图像和对应的真实世界坐标,能在一定程度上克服了噪声和畸变的影响,从而提高了相机标定的准确性和稳定性。
该方法广泛应用于计算机视觉、机器人导航等领域,为相机的精确几何校正提供了基础。
张正友标定方法
张正友标定方法是一种摄像机标定方法,旨在解决相机的畸变问题。
这种方法需要使用一个标定板,标定板上会有一些黑白相间的方格,通过对这些方格进行检测,可以得到相机的内参和外参矩阵。
在使用张正友标定方法时,需要考虑以下几个步骤:
1. 准备标定板。
标定板需要具有一定的尺寸和规则的黑白方格,以便于相机可以对其进行识别。
同时,标定板需要保持平整,以避免影响标定结果。
2. 拍摄标定板。
将标定板放在相机的拍摄范围内,采用不同的角度和距离进行多次拍摄。
需要注意的是,每次拍摄时标定板的位置和角度应该尽量保持一致。
3. 提取标定板角点。
通过对拍摄到的标定板图像进行处理,提取出标定板上的黑白方格的角点位置。
可以使用OpenCV等图像处理库进行实现。
4. 计算内参矩阵。
根据张正友的理论,通过角点的位置计算相机的内参矩阵。
内参矩阵包括相机的焦距、畸变等参数。
5. 计算外参矩阵。
根据标定板在相机坐标系下的位置和方向,计算相机的外参矩阵。
外参矩阵包括相机位置和方向等参数。
通过以上步骤,就可以得到相机的内参和外参矩阵,从而实现对相机的畸变进行校正。
张正友标定方法是一种比较成熟的相机标定方法,在计算精度和实现难度上都有较好的表现。
- 1 -。