第五章劳斯判据
- 格式:ppt
- 大小:391.00 KB
- 文档页数:18
第五章简介:本章介绍了单输入单输出控制系统稳定性的定义及其判定依据。
对于不同的系统,稳定性的定义不同。
系统的稳定性指标是控制系统设计过程中需要考虑的众多性能指标中最重要的指标,不稳定的系统是无法使用的。
主要包括赫尔维茨判据、劳斯判据、幅角原理、奈奎斯特稳定性判据等概念.重点是赫尔维茨稳定性判据和劳斯稳定性判据及其在系统分析中的应用.难点是应用复变函数的幅角原理推导奈奎斯特稳定性判据和对稳定裕度的理解。
随堂测试:一、知识点名称1:控制系统稳定性的基本概念1。
是保证控制系统正常工作的先决条件。
()A.稳定性B.快速性C.准确性D.连续性正确答案:A解析:不稳定的系统是无法使用的。
2。
是控制系统最重要的性能指标。
()A.稳定性B.快速性C.准确性D.连续性正确答案:A解析:稳定性是控制系统最重要的性能指标知识点名称2:单输入单输出控制系统稳定的条件1.单输入单输出控制系统稳定的条件为()A 特征方程根具有副实部B特征方程根具有副实部C极点位于复平面的右半部D极点位于虚轴上正确答案:A解析:单输入单输出控制系统稳定的充分必要条件为特征方程根全部具有副实部2。
某单位反馈系统的开环传递函数为,则该系统稳定的K值范围为() A.K〉0 B。
K>1 C。
0〈K<10 D K〉-1正确答案:A解析:其特征方程为,根据二阶螺丝准则和朱里准则,该系统稳定条件为;所以的K的取值范围为K〉0知识点名称3:赫尔维茨稳定性判据1。
赫尔维茨矩阵的各项主子式行列式的值全部为正,是线性系统稳定的条件。
()A.充分 B 必要C充要 D 即不充分也不必要正确答案:C解析:线性系统稳定的充要条件赫尔维茨矩阵的各项主子式行列式的值全部为正。
2。
如果满足主子式前提下,若所有次顺序赫尔维茨矩阵的主子式为正,则所有次顺序赫尔维茨矩阵的主子式为正。
()A BC D正确答案:B解析:如果满足条件,若所有奇次顺序赫尔维茨矩阵的主子式为正,则所有偶次顺序赫尔维茨矩阵的主子式必为正;反之亦然。
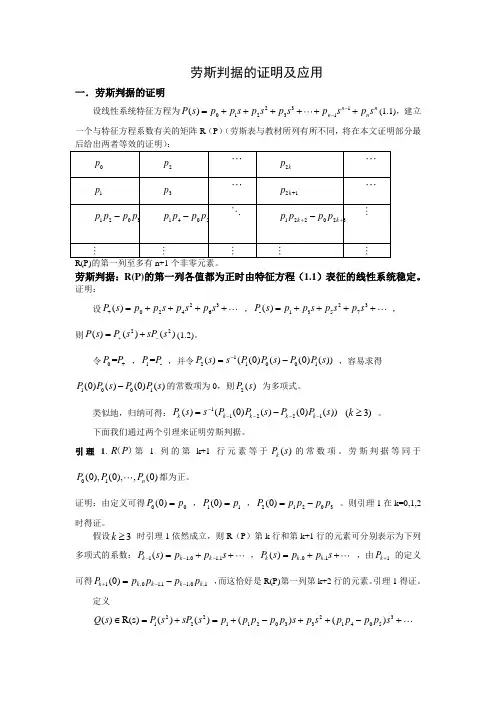
劳斯判据的证明及应用一.劳斯判据的证明设线性系统特征方程为23101231()n n n n P s p p s p s p s p s p s --=++++++(1.1),建立一个与特征方程系数有关的矩阵R (P )(劳斯表与教材所列有所不同,将在本文证明部分最劳斯判据:R(P)的第一列各值都为正时由特征方程(1.1)表征的线性系统稳定。
证明:设23+0246()P s p p s p s p s =++++ ,23-1357()P s p p s p s p s =++++,则22()()()P s P s sP s +-=+(1.2)。
令0+=P P ,1-=P P ,并令121001()((0)()(0)())Ps s P P s P P s -=- ,容易求得 1001(0)()(0)()P P s P P s -的常数项为0,则2()P s 为多项式。
类似地,归纳可得:11221()((0)()(0)())k k k k k P s s P P s P P s -----=- (3)k ≥ 。
下面我们通过两个引理来证明劳斯判据。
引理1.R P ()第1列的第k+1行元素等于()k P s 的常数项。
劳斯判据等同于01(0),(0),,(0)n P P P 都为正。
证明:由定义可得00(0)P p = ,11(0)P p = ,21203(0)P p p p p =- 。
则引理1在k=0,1,2时得证。
假设3k ≥ 时引理1依然成立,则R (P )第k 行和第k+1行的元素可分别表示为下列多项式的系数:11,01,1()k k k P s p p s ---=++,,0,1()k k k P s p p s =++,由1k P + 的定义可得1,01,110,1(0)k k k k k P p p p p +--=-, ,而这恰好是R(P)第一列第k+2行的元素。
引理1得证。
定义2223121120331405()R(s)()()()()Q s P s sP s p p p p p s p s p p p p s ∈=+=+-++-+由()P s 的定义易知Q 的最高阶最大为n-1.我们姑且假设1n p ≠ ,下面给出引理2: 引理2.下述表达等效:(1) 特征方程P(s)表示的线性系统稳定且0n p > 。