理论力学:虚位移原理及分析力学基础
- 格式:pdf
- 大小:103.43 KB
- 文档页数:2
第13章 虚位移原理及分析力学基础也称虚功原理。
在固体力学、结构力学中应用较多。
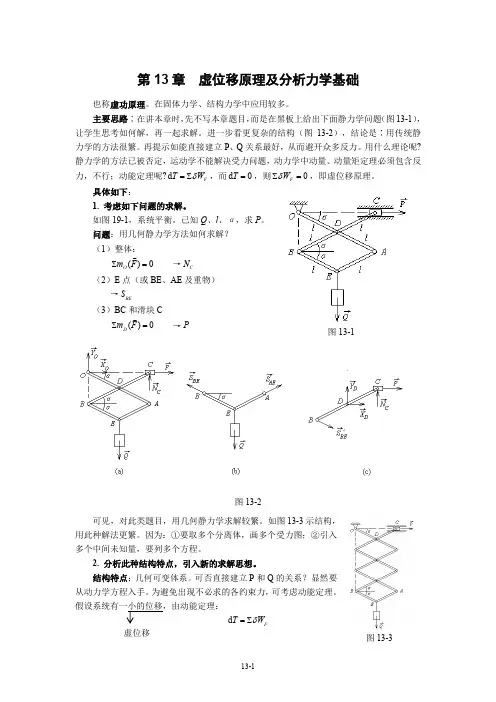
主要思路∶在讲本章时,先不写本章题目,而是在黑板上给出下面静力学问题(图13-1),让学生思考如何解,再一起求解。
进一步看更复杂的结构(图13-2),结论是∶用传统静力学的方法很繁。
再提示如能直接建立P 、Q 关系最好,从而避开众多反力。
用什么理论呢?静力学的方法已被否定,运动学不能解决受力问题,动力学中动量、动量矩定理必须包含反力,不行;动能定理呢?d F T W δ=∑,而d 0T =,则0F W δ∑=,即虚位移原理。
具体如下:1. 考虑如下问题的求解。
如图19-1,系统平衡。
已知Q 、l 、α,求P 。
问题:用几何静力学方法如何求解? (1)整体:()0O m F ∑=→C N (2)E 点(或BE 、AE 及重物)→BE S(3)BC 和滑块C()0D m F ∑=→P图13-2可见,对此类题目,用几何静力学求解较繁。
如图13-3示结构,用此种解法更繁。
因为:①要取多个分离体,画多个受力图;②引入多个中间未知量,要列多个方程。
2. 分析此种结构特点,引入新的求解思想。
结构特点:几何可变体系。
可否直接建立P 和Q 的关系?显然要从动力学方程入手。
为避免出现不必求的各约束力,可考虑动能定理。
假设系统有一小的位移,由动能定理:d F T W δ=∑图13-1图13-3虚位移由于系统平衡,动能无变化,d 0T =,则0F W δ∑= → 虚功方程此方程中只包含P 和Q ,故建立了简单的方程,可求P 。
此便是虚位移原理的思想。
严格建立虚位移原理,需有诸多基本概念。
13.1 约束 约束的运动学分类静力学中讲的约束——约束的力的性质(约束的力的方面),用约束力表示,常指物体; 此处讲的约束——约束的运动的性质(约束的运动的方面),用约束方程表示,指限制条件。
一、 约束和约束方程自由质点系:运动不受任何限制。
非自由质点系:运动受到限制——约束。
关于虚位移与虚位移原理──分析力学扎记之一
虚位移是分析力学中的一个非常有用的概念,它是一种现有的变形模型,可以帮助我们确定结构或体系在受力时的变形情况。
这种模型不仅在工程结构方面,还在许多行业中都用于解决实际应用中的问题。
下面我们就先详细来讲一讲虚位移的原理以及如何使用它。
虚位移的原理很简单,实质上就是计算受力情况下的位移的一种方法。
它的基本原理是,当给结构施加一个力时,每一点将受到一个同等的位移,但这个位移的方向会受到受力的方向的影响而不同。
虚位移的优点是它可以简化计算过程,减少计算量,并可以保证生成的数据准确可靠。
虚位移的具体使用方法首先要明确以下三点:一是确定施加力的方向;二是确定施加力的大小;三是确定每一点体系的位置。
接下来,我们就可以定义每一点在该力作用下的位移。
从定义上来看,虚位移是一个矢量,它由三个分量构成,包括弯杆方向的位移,即径向、轴向和切向位移三个方向。
比如一个弯杆受拉力,应用虚位移的话,拉力的方向已经确定,只需根据方向乘以施加的力的大小定义弯杆上每个点的位移,最终就可以定义出结构的变形情况。
总而言之,可以说虚位移的运用可以大大提高工程结构分析时的计算效率,并可以更好地解决实际应用中的问题。
根据虚位
移原理,我们可以通过求解和分析,正确准确地得出结构在受力情况下的变形情况。
理论力学导学章虚位移原理第1616章第16章虚位移原理目录1. 内容提要... ... ... ... ... ... ... ... ... ... ... ... (3)2. 基本要求... ... ... ... ... ... ... ... ... ... ... ... (7)3. 典型例题... ... ... ... ... ... ... ... ... ... ... ... (8)4. 补充习题... ... ... ... ... ... ... ... ... ... ... ... (36)1.内容提要1)基本概念虚位移原理是用动力学的解题方法来研究静力学的平衡问题。
(1) 虚位移的概念及计算虚位移不是经过d t时间所发生的真实小位移,而是假想的、约束所允许的微小位移。
(2) 虚位移的计算方法大致可以分为以下两种:a. 虚速度法当时间“冻结”后,虚位移与速度具有相同的几何关系,所以可以利用运动学中研究速度的各种方法。
b. 解析法当质点系的广义坐标一旦确定,就将各质点的坐标表示为广义坐标的函数,然后通过对各质点坐标的变分,得到各质点的虚位移表示广义坐标的变更的关系式。
但必须注意,在应用解析法解题时,质点系中每一个质点都应处于一般位置。
0δ1=⋅∑=i ni i r F r r 0)δδδ(1=++∑=ni i iz i iy i ix z F y F x F (3)虚位移原理的应用几何形式对结构和机构都是适合的,但对机构,用解析法往往比较方便。
解析形式不能应用于处于特殊位置的机构。
应用虚位移原理解题时,对自由度为零的结构,根据题所要求的未知量,一般每次解除一个约束,使系统只有一个自由度,然后应用虚位移原理的几何形式(虚速度法)求解;对处于一般位置的机构,则可应用虚位移的解析形式求解。
虚位移原理的两种表达形式几何形式解析形式广义坐标形式的虚位移原理广义力以广义坐标表示的虚位移就是广义虚位移,与广义虚位移乘积后可以构成虚功的主动力就是广义力。

如何理解理论力学中的虚位移原理?在理论力学的广阔领域中,虚位移原理是一个极其重要的概念,它为解决力学问题提供了一种独特而有效的方法。
然而,对于许多初学者来说,理解虚位移原理可能会感到有些困惑。
那么,让我们一起来揭开它神秘的面纱,深入探讨如何理解这一重要原理。
首先,我们来明确一下什么是虚位移。
虚位移并不是实际发生的位移,而是在某一瞬时,质点或质点系在约束许可的条件下,设想的无限小位移。
它是一种假想的、符合约束条件的位移。
为了更好地理解,我们可以想象一个被绳子悬挂着的小球。
在某一时刻,如果我们假设小球可以在不破坏绳子约束的情况下有一个微小的位移,这个微小的位移就是虚位移。
那么,虚位移原理到底说了什么呢?简单来说,虚位移原理指出:对于一个受理想约束的质点系,其平衡的充分必要条件是,作用于质点系的所有主动力在任何虚位移上所做的虚功之和等于零。
这听起来可能有点抽象,让我们通过一个具体的例子来解释。
假设我们有一个由两个质点通过一根轻质刚性杆连接的系统,放在光滑的水平面上。
质点 A 受到一个水平向右的力 F₁,质点 B 受到一个水平向左的力 F₂。
如果这个系统处于平衡状态,根据虚位移原理,我们可以假设质点 A 有一个向右的虚位移δr₁,质点 B 有一个向左的虚位移δr₂。
由于杆是刚性的,所以两个质点的虚位移之间存在一定的关系。
那么,主动力 F₁和 F₂在相应的虚位移上所做的虚功之和F₁·δr₁ F₂·δr₂就等于零。
虚位移原理的重要性在于它为解决静力学问题提供了一种统一的方法,避免了分别对每个物体进行受力分析和列平衡方程的繁琐过程。
通过虚位移原理,我们可以直接从系统的整体出发,找到力与虚位移之间的关系,从而快速确定系统是否平衡以及未知力的大小。
理解虚位移原理还需要注意一些关键的要点。
首先是理想约束的概念。
理想约束是指约束力在虚位移上所做的虚功之和为零的约束。
常见的理想约束包括光滑接触面、光滑铰链、不可伸长的绳索等。
第13章 虚位移原理及分析力学基础也称虚功原理。
在固体力学、结构力学中应用较多。
主要思路∶在讲本章时,先不写本章题目,而是在黑板上给出下面静力学问题(图13-1),让学生思考如何解,再一起求解。
进一步看更复杂的结构(图13-2),结论是∶用传统静力学的方法很繁。
再提示如能直接建立P 、Q 关系最好,从而避开众多反力。
用什么理论呢?静力学的方法已被否定,运动学不能解决受力问题,动力学中动量、动量矩定理必须包含反力,不行;动能定理呢?d F T W δ=∑,而d 0T =,则0F W δ∑=,即虚位移原理。
具体如下:1. 考虑如下问题的求解。
如图19-1,系统平衡。
已知Q 、l 、α,求P 。
问题:用几何静力学方法如何求解? (1)整体:()0O m F ∑=→C N (2)E 点(或BE 、AE 及重物)→BE S(3)BC 和滑块C()0D m F ∑=→P图13-2可见,对此类题目,用几何静力学求解较繁。
如图13-3示结构,用此种解法更繁。
因为:①要取多个分离体,画多个受力图;②引入多个中间未知量,要列多个方程。
2. 分析此种结构特点,引入新的求解思想。
结构特点:几何可变体系。
可否直接建立P 和Q 的关系?显然要从动力学方程入手。
为避免出现不必求的各约束力,可考虑动能定理。
假设系统有一小的位移,由动能定理:d F T W δ=∑图13-1图13-3虚位移由于系统平衡,动能无变化,d 0T =,则0F W δ∑= → 虚功方程此方程中只包含P 和Q ,故建立了简单的方程,可求P 。
此便是虚位移原理的思想。
严格建立虚位移原理,需有诸多基本概念。
13.1 约束 约束的运动学分类静力学中讲的约束——约束的力的性质(约束的力的方面),用约束力表示,常指物体; 此处讲的约束——约束的运动的性质(约束的运动的方面),用约束方程表示,指限制条件。
一、 约束和约束方程自由质点系:运动不受任何限制。
非自由质点系:运动受到限制——约束。
第8章 虚位移原理与能量法虚位移原理也是分析力学的两个基本原理之一。
分析力学是继牛顿矢量力学后,针对受约束质点系创立的一种采用标量分析的力学体系。
在第1,2两章中介绍的几何静力学,采用矢量方法,通过主动力与约束力之间的关系表述刚体的平衡。
对于可变形系统,几何静力平衡条件仅是必要而非充分的;对于物系平衡问题,往往需要拆开研究,未知约束力多,求解过程繁冗。
虚位移原理则从运动中考察系统的平衡,建立理想约束模型,引入虚位移概念,通过作用在质点系上所有主动力在虚位移上的虚功关系给出一个普遍适用的平衡充要条件。
它是研究任意受约束质点系平衡的十分有效而又普遍的方法。
虚位移原理与达朗贝尔原理相结合奠定了分析动力学的基础。
将虚功方程应用于变形体,导出后继课程应用的卡氏定理、莫尔定理等,奠定了变形体能量法的理论基础。
为了阐明虚位移原理,需要建立约束与约束方程、虚位移与虚功的基本概念。
§8.1 约束分类与位形描述8.1.1 约束及其分类约束是事先限制质点或质点系位置和运动的各种条件,这个扩充的约束概念包含了静力学中的约束;约束条件的数学表达式称为约束方程。
考察由n 个质点组成的非自由质点系,根据其约束方程的形式及其所含变量不同,约束分类如下。
1 定常约束与非定常约束约束方程中不显含时间与显含时间t 的约束,分别称为定常(稳定)约束与非定常(非稳定)约束,其约束方程分别为1212(,,,)0 (,,,,)0n n f f t == ααr r r r r r 和 (8-1)式中,i r 为第i 个质点的矢径;1,2,,s α= ;s 为约束数。
如图8.1所示,由无重刚杆悬挂的单摆,其约束方程222x y l +=中不显含时间t ,是定常约束;图8.2中,由绕滑轮的细绳悬挂的单摆,其摆长随时间变化,约束方程2220()x y l vt +≤-中显含时间t ,是非定常约束。
2 双面约束与单面约束约束方程写成等式的约束称为双面约束,约束方程为不等式的约束叫单面约束,s 个独立的约束方程分别为121212(,,,,)0 (,,,,)0(,,,,)0. 1,,n n n f t f t f t sαααα=≤≥=r r r r r r r r r 和或 (8-2)图8.1 定常、完整、双面约束 图8.2 非定常、非完整、单面约束图8.1中,摆杆为刚性,小球在沿杆的两个方向运动均受限制,杆对球的约束是双面约束。
虚位移原理虚位移原理提供了静力学问题的一种全新的解法,它还是分析力学的基础。
虚位移原理是设计用来消除平衡方程中的约束力,主要是用来求解平衡系统的主动力之间的关系或平衡位置。
另外,通过解除约束,将内力或约束力转化为主动力,则虚位移原理也可用来求解内力和约束力,而且这比以前的列平衡方程的常规方法更有效。
一、力的功元功:力在微小位移上所做的功称为元功。
其数学表达式为:t d W v F ∙=δ或r F d W ∙=δ,其中v 和r d 分别为力F 作用点的速度和微小位移。
变力在曲线路径上做的功可以用曲线积分计算。
等效力系做功定理: 等效力系在刚体的位移上所做的功相等。
即:若},,{},,{11m P P F F n =,则∑∑===mj jn i i P W F W 11)()(。
在计算力的功时,为计算方便,可以利用上述定理。
例如:图4-1(a)所示鼓轮上缠绕有柔索,在力F (大小和方向不变)作用下在地面上纯滚动。
计算在轮心沿直线移动S 距离过程中力F 所做的功。
(a) (b) 图4-1由于力F 的作用点的位移不易计算,我们可将F 平移到轮心,同时附加一力偶M (其力偶矩的大小为=M Fr ,如图4-1b 所示)以保持力系等效,即},{}{M F F =。
新的力系},{M F 在轮心沿直线移动S 距离过程中所作的功较易计算:ϕθM FS W +=cos ,其中:ϕ为圆盘轮心移动S 距离时,圆盘转动的角度,即RS =ϕ,于是上式可写成cos SW FS Fr R θ=+⋅ 它等于在轮心沿直线位移S 距离过程中力F 所做的功。
返回主目录二、约束及其分类约束:对质点或质点系运动所加的限制。
如某质点被限制在固定曲面上运动,则该质点就是受到了约束。
约束体对被约束体的运动是通过力的作用(称为约束力)来加以限制的,但是约束与受力是应区别对待的两个不同概念,这可以通过下面的例子来区分.(a)(b) (c)图4-2对图4-2中所示的系统:在(a)中,质点A 被固定在刚性杆上并球铰链连接接在固定点o 。
13.虚位移原理及分析力学基础
自由质点系:运动状态(轨迹、速度等)只取决于作用力和运动的起始条件的质点系。
非自由质点系:运动状态受到某些预先给定的限制(运动的起始条件也要满足这些限制条件)的质点系。
约束:非自由质点系所受到的预先给定的限制。
约束方程:用解析表达式表示的限制条件。
几何约束:只限制质点或质点系在空间位置的约束。
运动约束:对于质点或质点系不仅有位移方面的限制,还有速度或角速度方面的限制的约束。
定常约束:约束方程中不显含时间的约束。
非定常约束:约束方程中显含时间的约束。
完整约束:约束方程不包含质点速度,或者包含质点速度但是它可以积分,转换为有限形式的约束。
非完整约束:约束方程包含质点速度、且不可积分不能转换为有限形式的约束。
双面约束:不仅能限制质点在某一方向的运动,还能限制其在相反方向的运动的约束。
单面约束:只能限制质点沿某一方向运动的约束。
自由度数:在具有完整约束的质点系中,唯一地确定系统在空间的位形或构形的独立坐标的数目数。
广义坐标:用来确定质点系位置的独立参数。
虚位移:在给定位置上,质点或质点系在约束所容许的条件下可能发生的任何无限小位移,称为质点或质点系的虚位移。
虚功:作用于质点上的力在该质点的虚位移中所作的元功,用δW 表示。
若用F ,δr 分别代表力和虚位移,则虚功的表达式为F W δδ=⋅F r 。
理想约束:约束力虚功之和等于零的约束。
虚位移原理:具有理想约束的质点系,在给定位置保持平衡的必要和充分条件是,所有作用于该质点系上的主动力在任何虚位移中所作的虚功之和等于零。
作用于质点系上的主动力对应于广义坐标q
h 的广义力:
1
n
i
Qh i
i h
r
F F
q
∂
∂
=
=⋅
∑。
平衡稳定性:在保守系统中,(1)受到微小的扰动而偏离平衡位置后,它能返回到原平衡位置,这种平衡状态称为稳定平衡;(2)受到微小的扰动后,再也不能回到原平衡位置,这种平衡状态称为不稳定平衡;(3)不论在哪个位置,总是平衡的,这种平衡状态称为随遇平衡。
动力学普遍方程:在具有理想约束的质点系中,在任一瞬时,作用于各质点上的主动力和虚加的惯性力在任意虚位移上所作虚功之和等于零。