超静定结构与弯矩分配法
- 格式:ppt
- 大小:1.58 MB
- 文档页数:28
第4章超静定结构§4.1 超静定结构特性●由于多余约束的存在产生的影响1. 内力状态单由平衡条件不能惟一确定,必须同时考虑变形条件。
2. 具有较强的防护能力,抵抗突然破坏。
3. 内力分布范围广,分布较静定结构均匀,内力峰值也小。
4. 结构刚度和稳定性都有所提高。
●各杆刚度改变对内力的影响1. 荷载作用下内力分布与各杆刚度比值有关,与其绝对值无关。
2. 计算内力时,允许采用相对刚度。
3. 设计结构断面时,需要经过一个试算过程。
4. 可通过改变杆件刚度达到调整内力状态目的。
●温度和沉陷等变形因素的影响1. 在超静定结构中,支座移动、温度改变、材料收缩、制造误差等因素都可以引起内力,即在无荷载下产生自内力。
2. 由上述因素引起的自内力,一般与各杆刚度的绝对值成正比。
不应盲目增大结构截面尺寸,以期提高结构抵抗能力。
3. 预应力结构是主动利用自内力调节超静定结构内力的典型范例。
§4.2 力法原理●计算超静定结构的最基本方法超静定结构是具有多余联系(约束)的静定结构,其反力和内力(归根结底是内力)不能或不能全部根据静力平衡条件确定。
力法计算超静定结构的过程一般是在去掉多余联系的静定基本结构上进行,并选取多余力(也称赘余力)为基本未知量(其个数等于原结构的超静定次数)。
根据基本体系应与原结构变形相同的位移条件建立方程,求解多余力后,原结构就转化为在荷载和多余力共同作用下的静定基本结构的计算问题。
这里,基本体系起了从超静定到静定、从静定再到超静定的过渡作用,即把未知的超静定问题转换成已知的静定问题来解决。
●基本结构的选择(解题技巧)1. 通常选取静定结构;也可根据需要采用比原结构超静定次数低的、内力已知的超静定结构;甚至可取几何可变(但能维持平衡)的特殊基本结构。
2. 根据结构特点灵活选取,使力法方程中尽可能多的副系数δij = 0。
3. 应选易于绘制弯矩图或使弯矩图限于局部、并且便于图乘计算的基本结构。
11秋建筑施工与管理专科《建筑力学》期末复习指导一、课程说明《建筑力学》是广播电视大学土木工程专业(本科)和水利水电工程专业(本科)的补修课。
本课程的教材:《建筑力学》,作者:吴国平,中央广播电视大学出版社出版。
二、考试说明1、考核方式闭卷考试,考试时间为90分钟。
2、试题类型试题类型分为两类:第一类判断题与选择题,占30%;第二类计算题,占70%。
计算题共4题,主要类型有:求静定结构支座反力并画内力图,梁的正应力强度计算,图乘法求位移,力法计算超静定结构,力矩分配法计算超静定结构。
三、复习要点第一章静力学基本知识一、约束与约束反力1.柔索约束:由软绳构成的约束。
约束反力是拉力;2.光滑面约束:由两个物体光滑接触构成的约束。
约束反力是压力;3.滚动铰支座:将杆件用铰链约束连接在支座上,支座用滚轴支持在光滑面上,这样的支座称为滚动铰支座。
约束反力垂直光滑面;4.链杆约束:链杆是两端用光滑铰链与其它物体连接,不计自重且中间不受力作用的杆件。
约束反力作用线与两端铰链的连线重合。
5.固定铰支座:将铰链约束与地面相连接的支座。
约束反力是一对相互垂直的力6.固定端:使杆件既不能发生移动也不能发生转动的约束。
约束反力是一对相互垂直的力和一个力偶。
二、力矩与力偶1.力偶不等效一个力,也不能与一个力平衡。
2.力偶的转动效果由力偶矩确定,与矩心无关。
3.力对点之矩一般与矩心位置有关,对不同的矩心转动效果不同4.力偶与矩心位置无关,对不同点的转动效果相同。
三、主矢和主矩1.主矢与简化中心位置无关,主矩与简化中心位置有关。
2.平面任意力系向一点简化的结果a)主矢不为零,主矩为零:一个合力;b)主矢不为零,主矩不为零:一个合力、一个合力偶;c)主矢为零,主矩不为零——一个合力偶;d)主矢为零,主矩为零——平衡力系。
四、平面力系1.平面任意力系的主矢和主矩同时为零,即,是平面任意力系的平衡的必要与充分条件。
2.平面一般力系有三个独立方程可求解三个未知数,平面平行力系有二个独立方程可求解二个未知数。
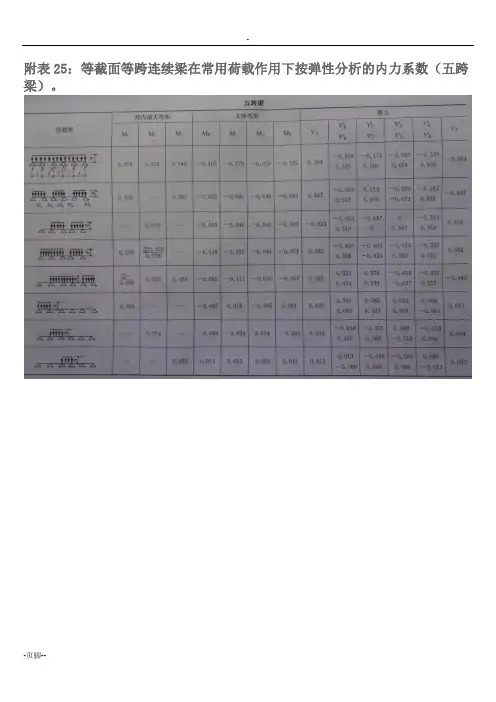
附表25:等截面等跨连续梁在常用荷载作用下按弹性分析的内力系数(五跨梁)。
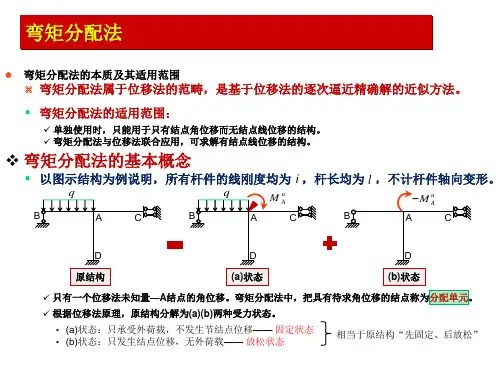
弯矩分配法(弯矩分配法计算连续梁和刚架及举例)一、名词解释弯矩分配法在数学上属于逐次逼近法,但在力学上属于精确法的范畴,主要适用于连续梁和刚架的计算。
在弯矩分配法中不需要解联立方程,而且是直接得出杆端弯矩。
由于计算简便,弯矩分配法在建筑结构设计计算中应用很广。
(一)线刚度i杆件横截面的抗弯刚度EI 被杆件的长度去除就是杆件的线刚度i :l EI i(a ) 当远端B 为固定支座时,对于A 点处,AB 杆的转动刚度i S AB 4=; (b ) 当远端B 为铰支座时,对于A 点处,AB 杆的转动刚度i S AB 3=;(c ) 当远端B 为滑动支座时,对于A 点处,AB 杆的转动刚度i S AB =;(d ) 当远端B 为自由端时,对于A 点处,AB 杆的转动刚度0=AB S 。
连续梁和刚架的所有中间支座在计算转动刚度时均视为固定支座。
(二)转动刚度S转动刚度表示靠近节点的杆件端部对该节点转动的反抗能力。
杆端的转动刚度以S 表示,等于杆端产生单位转角需要施加的力矩,θ/M S =。
施力端只能发生转角,不能发生线位移。
AB S 中的第一个角标A 是表示A 端,第二个角标B是表示杆的远端是B 端。
AB S 表示AB 杆在A 端的转动刚度。
(三)分配系数μ⎪⎭⎪⎬⎫⋅=⋅=⋅=⋅=⋅=⋅=A AD A AD AD A AC A AC AC A AB A AB AB i S M i S M i S M θθθθθθ34 ⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫⋅=⋅=⋅==++=++=++=∑∑∑∑M S S M M S S M M S S M SM S S S M M M M S S S M AD AD AC AC AB AB AD AC AB A ADAC AB A AD A AC A AB θθθθ各杆A 端所承担的弯矩与各杆A 端的转动刚度成正比。
分析超静定结构的基本方法【摘要】本文介绍了解决超静定结构(statically indeterminate structure)问题的两种基本方法——力法(force method)和位移法(displacement method ),并分析这两种基本方法的区别与联系。
【关键词】超静定结构;力法;位移法;对比0.引言在工程实际中,大多数结构是超静定结构。
超静定结构是指具有多余约束的结构,即广义力的总数超过了所能列出的独立平衡方程的总数。
超静定结构受力复杂,在弹性理论计算方法下,仅由平衡条件不能确定超静定结构全部反力和内力,必须考虑变形条件,故其受力情况与截面刚度(即材料的物理性质与截面的几何性质)有关。
而通过塑性分析方法,实际情况中考虑到塑性铰分布情况及出现的先后顺序,分析及计算结构构件的强度极限十分困难。
因此解决实际中的超静定结构构件问题尤为重要。
在求解超静定问题时需要综合考虑三个方面的条件:平衡条件(力的平衡),几何条件(位移的协调),物理条件(力与位移的物理关系)。
在具体求解时,有两种不同的方法即力法(又称柔度法)和位移法(又称刚度法)。
力学方法论中常用三法:分和法、对比法和过渡法。
1.力法——转化搭桥,过渡法力法的最主要策略是过渡策略。
要求解超静定问题,就是把静定问题求解方法向超静定问题过渡。
力法的基本未知量是指广义力超过独立平衡方程能解出力的个数。
即X,X,X在实际过程中,只需解决这些多余未知量,超静定问题就迎刃而解!我们通常从基本体系入手,将超静定问题转换成静定问题。
一个超静定结构模型简图,将多余约束去掉,代之以对应的多余未知力X,X,X......即得到超静定结构对应的静定结构。
对力法的基本体系,可以列出独立的平衡方程,同时,需要补充由变形协调条件。
变形协调条件是根据去掉多余约束处结构变形与实际情况相同列出。
得出的附加方程如下:2.位移法——拆了再搭,分和法用位移法求解超静定结构第一步是把刚架离散成杆件(单元),进行单元分析。
超静定结构名词解释超静定结构是指结构中的支座数超过了所需的最小支座数,即具有超过两个支座。
在工程实践中,超静定结构通常用于需要更高的刚度和稳定性的场合。
本文将对超静定结构中的一些重要名词进行解释。
一、超静定结构超静定结构是指结构中的支座数超过了所需的最小支座数,即具有超过两个支座。
超静定结构的刚度和稳定性高于静定结构,但也带来了一些挑战,如设计和施工难度增加、应力集中等问题。
二、支座反力支座反力是指结构中支座所产生的反力。
在超静定结构中,支座反力的计算需要考虑结构的刚度和支座的位置等因素。
支座反力的大小和方向对结构的稳定性和安全性具有重要影响,因此需要进行准确的计算和分析。
三、弯矩分配弯矩分配是指在超静定结构中,支座反力的大小和方向不足以确定所有构件的内力分布,需要通过弯矩分配来解决。
弯矩分配的目的是使得结构中的每个构件都满足力学平衡条件和变形兼容条件,从而得到合理的内力分布。
四、刚度矩阵法刚度矩阵法是一种用于求解超静定结构内力的常用方法。
该方法将结构划分为若干个单元,每个单元的刚度矩阵可以通过杆件或板单元的刚度矩阵求得。
通过组装单元的刚度矩阵,可以得到整个结构的刚度矩阵,再结合支座反力和边界条件,可以求解出结构的内力分布。
五、剪力墙剪力墙是一种常用的超静定结构形式。
它是由墙体和框架构件组成的结构体系,通过墙体的承载作用来提高整个结构的刚度和稳定性。
剪力墙的设计需要考虑墙体的位置、厚度和槽口的大小等因素,同时也需要考虑墙体与框架构件的连接方式和布置方式等因素。
六、预应力混凝土预应力混凝土是一种常用于超静定结构中的材料。
它通过在混凝土中引入预应力,可以提高混凝土的刚度和承载能力。
预应力混凝土的设计需要考虑预应力的大小、方向和位置等因素,同时也需要考虑混凝土的强度和变形等因素。
七、局部加劲局部加劲是一种常用于超静定结构中的加固措施。
它通过在结构中加入附加构件或加强现有构件的截面,来提高结构的刚度和稳定性。
超静定结构(Statically in determ in ate structure)有多余约束的几何不变体系称为超静定结构。
超静定结构的全部反力和内力不能由静力平衡方程完全确定。
超静定次数(degree of in determ inacy超静定结构所具有的多余约束的数目。
多多余约束(Redundant constrain]如果在一个体系中增加一个约束,而体系的自由度并不因此减少,则称此约束为多余约束。
多跨静定梁(statically determinate multi-span bean)将若干根梁用铰连接在一起,并以若干支座与基础相连而组成的静定梁。
叠叠加法(superposition method在线弹性范围内,结构由几个外力共同作用时,所引起的结构内力,等于每个外力单独作用时所引起内力的代数和。
多多余未知力(redundant unknown force)多余约束上产生的反力。
动动力荷载(dynamic load)大小、方向和作用位置等随时间变化,并且使结构产生不容忽视的惯性力的荷载。
单单自由度体系(single dgree of freedom system振动自由度为一个的体系。
附附属部分(accessory part根据多跨静定梁的几何组成规律,可以将其各部分区分为基本部分和附属部分,必须依靠基本部分的支承才能承受荷载并保持平衡的部分称为附属部分。
分分配系数(distribution factor)刚结点中某杆端的转动刚度与同一刚结点上所有杆的转动刚度总和的比值。
刚片(Rigiditical object)无论体系形状如何,当其几何形状不变时,均可看作一个刚体,在平面体系中刚体可称为刚片。
刚架(frame)由若干根直杆彼此用刚结点,或一部分刚结点连接而成的结构。
拱拱(arch)轴线为曲线且在荷载作用下能够产生水平反力的结构。
合合理拱轴线(optimal arch axis)当拱结构上所有截面的弯矩为零只有轴力时,横截面上的正应力是均匀分布的,材料的力学性能得以最充分的发挥,这样的拱轴线称为合理拱轴线。