1超静定结构的解法
- 格式:ppt
- 大小:1.06 MB
- 文档页数:2
超静定结构的解法
迭代解法主要利用迭代计算的方法,在每次迭代中修正应力和应变的分布,直到趋于稳定。
该方法的基本步骤如下:
1.假设受力的初始状态,即假设一些节点处的节点位移和内力;
2.利用结构的几何约束和材料力学性质,计算一些节点处的内力和位移;
3.判断内力和位移是否满足力学静平衡条件,若满足则计算结束,否则进入下一步;
4.通过一定的修正方法,调整节点内力和位移;
5.重复步骤2至步骤4,直到内力和位移满足力学静平衡条件。
迭代解法的优点是通用性强,适用于各种超静定结构,但收敛速度较慢,计算量较大。
弹性势能法是利用结构的势能原理,将结构的力学行为转化为弹性势能的变化来求解结构的内力和位移。
该方法的基本步骤如下:
1.根据结构的受力情况和约束条件,建立适当的势能表达式;
2.利用力学静平衡方程,将势能表达式表示为内力和位移的函数;
3.求解势能的极值点,即通过对内力和位移偏导等于零,解得内力和位移的方程;
4.建立适当的边界条件,如位移边界条件和约束条件;
5.通过求解得到的方程,计算结构的内力和位移。
弹性势能法的优点是求解过程相对简单,收敛速度较快,但要求结构能够满足一定的连通性和对称性条件。
在解超静定结构的过程中,还可以采用其他方法来辅助计算,如虚功法、位移法、能量法等。
此外,有些超静定结构也可以通过变形补偿或者加固措施等方法使之退化为静定结构,进而采用常规的静力计算方法来求解。
总之,解超静定结构是一个相对复杂的过程,需要利用附加条件和弹性支承约束来求解。
通过迭代解法和弹性势能法等方法可以得到结构的内力和位移,为实际工程中的设计和分析提供重要的参考和依据。
第六章位移法超静定结构两类解法:力法:思路及步骤,适用于所有静定结构计算。
结合位移法例题中需要用到的例子。
有时太繁,例。
别的角度:内力和位移之间的关系随外因的确定而确定。
→位移法,E,超静定梁和刚架。
于是,开始有人讨论:有没有别的方法来求解或换一个角度来分析…,what?我们知道,当结构所受外因(外荷载、支座位移、温度变化等)一定⇒内力一定⇒变形一定⇒位移一定,也就是结构的内力和位移之间有确定的关系(这也可以从位移的公式反映出来)。
力法:内力⇒位移,以多余力为基本未知量…,能否反过来,也就是先求位移⇒内力,即以结构的某些位移为基本未知量,先想办法求出这些位移,再求出内力。
这就出现了位移法。
目前通用的位移法有两种:英国的、俄罗斯的,两者的实质是相同的。
以结构的某些结点位移作为基本未知量,由静力平衡条件先求出他们,再据以求出结构的内力和其它位移。
这种方法可以用于求解一些超静定梁和刚架,十分方便。
例:上面的例子,用位移法求解,只有结点转角一个未知量。
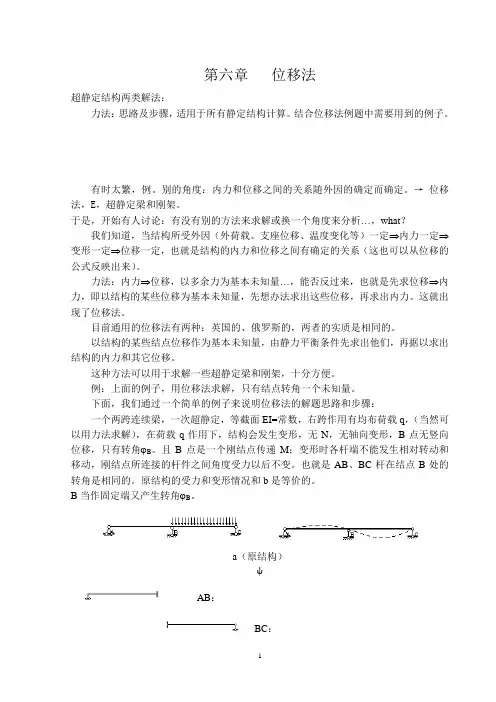
下面,我们通过一个简单的例子来说明位移法的解题思路和步骤:一个两跨连续梁,一次超静定,等截面EI=常数,右跨作用有均布荷载q,(当然可以用力法求解),在荷载q作用下,结构会发生变形,无N,无轴向变形,B点无竖向位移,只有转角ϕB。
且B点是一个刚结点传递M;变形时各杆端不能发生相对转动和移动,刚结点所连接的杆件之间角度受力以后不变。
也就是AB、BC杆在结点B处的转角是相同的。
原结构的受力和变形情况和b是等价的。
B当作固定端又产生转角ϕB。
a(原结构)AB:BC:b如果把转角ϕB 当作支座位移这一外因看,则原结构的计算就可以变成两个单跨超静定梁来计算。
显然,只要知道ϕB ,两个单跨静定梁的计算可以用力法求解出全部反力和内力,现在的未知量是ϕB (位移法的基本未知量)。
关键:如何求ϕB ?求出ϕB 后又如何求梁的内力?又如何把a ⇒b 来计算? 我们采用了这样的方法:假定在刚结点B 附加一刚臂(▼),限制B 点转角,B ⇒固定端(无线位移,无转动)(略轴向变形)原结构就变成了AB 、BC 两个单跨超静定梁的组合体:AB : ,BC :但现在和原结构的变形不符,ϕB ,所以为保持和原结构等效,人为使B 结点发生与实际情况相同的转角ϕB (以Z 1表示,统一)。
第八章超静定结构解法
超静定结构是指结构中的节点数超过了杆件数,即结构中的自由度超过了平衡条件的数量。
对于超静定结构的解法,需要进行位移计算和支反力计算。
位移计算可以通过以下步骤进行:
1.建立结构的刚度方程。
根据杆件的刚度和支座的自由度约束,可以建立结构的刚度矩阵。
刚度矩阵是一个n×n的矩阵,其中n是结构的自由度数量。
2.确定约束条件。
根据结构的支座约束,可以确定支座位移为零的约束条件。
3.应用边界条件。
将约束条件应用到刚度方程中,可以得到一个未知位移的方程组。
4.解未知位移。
通过解这个方程组,可以得到结构的未知位移值。
支反力计算可以通过以下步骤进行:
1.利用位移计算中得到的未知位移值,计算杆件的应力。
应力可以通过应变和材料的本构关系得到。
2.根据杆件的几何特征和应力,计算杆件的应力。
应力可以根据杆件的截面积和应力得到。
3.根据杆件的几何特征和应力,计算杆件的内力。
内力可以根据截面受力平衡的条件得到。
4.根据内力和支座约束,计算支座的反力。
反力可以通过力的平衡条件得到。
总的来说,超静定结构的解法需要进行位移计算和支反力计算。
在位移计算中,需要建立结构的刚度方程,并将约束条件以及边界条件应用到方程中,来解未知位移。
在支反力计算中,需要利用位移计算中得到的未知位移值,计算杆件的应力和内力,并根据杆件的几何特征和应力来计算支座的反力。
力法、位移法求解超静定结构讲解
超静定结构是指在结构中存在多余的支座或者杆件,使得结构的自由度小于零,即结构无法通过静力学方法求解。
在这种情况下,我们需要采用力法或者位移法来求解结构的内力和位移。
力法是指通过假设结构内力的大小和方向,来求解结构的内力和位移的方法。
在力法中,我们需要假设结构内力的大小和方向,然后通过平衡方程和变形方程来求解结构的内力和位移。
力法的优点是计算简单,适用于简单的结构,但是对于复杂的结构,力法的假设可能会导致误差较大。
位移法是指通过假设结构的位移,来求解结构的内力和位移的方法。
在位移法中,我们需要假设结构的位移,然后通过平衡方程和变形方程来求解结构的内力和位移。
位移法的优点是适用于复杂的结构,可以准确地求解结构的内力和位移,但是计算较为繁琐。
在实际工程中,我们通常采用力法和位移法相结合的方法来求解超静定结构。
首先,我们可以通过力法来确定结构的内力大小和方向,然后再通过位移法来求解结构的位移。
这种方法可以充分利用力法和位移法的优点,减小误差,提高计算精度。
超静定结构的求解需要采用力法和位移法相结合的方法,通过假设结构的内力和位移,来求解结构的内力和位移。
在实际工程中,我们需要根据具体情况选择合适的方法,以保证计算精度和效率。
位移法求解超静定结构一、引言超静定结构是指在静力学条件下,其内力和位移无法通过平衡方程和变形方程求解的结构。
由于超静定结构的内力和位移无法直接求解,因此需要采用特殊的方法进行计算。
其中,位移法是一种经典的求解超静定结构的方法。
二、位移法基本原理位移法是一种基于能量原理的方法,其基本思想是将结构中各个部分的变形看作独立自由度,然后通过能量平衡原理得到各个自由度之间的关系,最终求解出整个结构的内力和位移。
具体来说,位移法包括以下几个步骤:1. 将超静定结构中每一个部分看作一个独立自由度,并为每个自由度引入一个未知位移;2. 根据平衡条件列出各部分之间相互制约的方程组;3. 根据能量平衡原理列出总势能和总应变能之间的关系式,并将其转化为未知位移之间的关系式;4. 将各个方程组联立起来,得到未知位移之间的关系式;5. 利用已知边界条件解出未知位移,并进而求解出整个结构的内力和位移。
三、位移法的应用范围位移法适用于各种类型的超静定结构,包括梁、柱、框架等。
此外,位移法还可以用于求解复杂的结构体系,如悬索桥、拱桥等。
四、位移法的优点和缺点1. 优点:(1)能够求解各种类型的超静定结构;(2)计算精度高,适用于复杂结构;(3)计算过程简单明了,易于理解和掌握。
2. 缺点:(1)只能求解超静定结构,不能求解不静定和半静定结构;(2)需要将每个部分看作独立自由度,因此对于复杂结构需要引入大量自由度,计算量较大;(3)需要具备一定的数学基础和结构力学知识。
五、位移法的实例以一根简支梁为例进行说明。
假设梁长为L,截面为矩形截面,宽度为b,高度为h。
在中间加一集中荷载F,则该梁为超静定结构。
采用位移法进行求解:1. 将梁分成两段,并引入两个未知位移u1和u2;2. 根据平衡条件,得到以下方程组:(1)在x=0处:F = R1 + R2(2)在x=L处:R1u1 + R2u2 = FL/43. 根据能量平衡原理,得到以下关系式:(1)总势能:V = (R1u1 + R2u2)hL/2(2)总应变能:T = F^2L^3/48EI4. 将以上方程组和关系式联立起来,得到:(1)F = (3EI/h^3L^3)(u1 - u2)(2)R1 = F/2 - EI/h^3L^3(u1 + u2)(3)R2 = F/2 + EI/h^3L^3(u1 + u2)5. 利用已知边界条件,即梁两端的位移为0,解出未知位移:(1)u1 = FL^3/(48EIh);(2)u2 = -FL^3/(48EIh);6. 最终求解出内力和位移:(1)R1 = F/4;(2)R2 = F/4;(3)Mmax = FL/8;(4)umax = FL^3/(48EIh)。
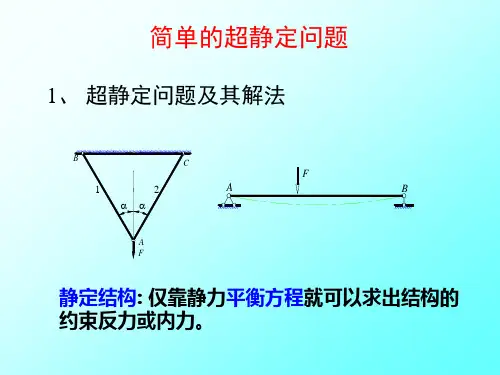
§1.3超静定结构的计算超静定结构是具有多余约束的几何不变体系,仅根据静力平衡条件不能求出其全部支座反力和内力,还须考虑变形协调条件。
计算超静定结构的基本方法是力法和位移法。
这两种基本方法的解题思路,都是设法将未知的超静定结构计算问题转换成已知的结构计算问题。
转换的桥梁就是基本体系,转换的条件就是基本方程,转换后要解决的关键问题就是求解基本未知量。
1.3.1力法力法是以多余未知力为基本未知量、一般用静定结构作为基本结构,以变形协调条件建立基本方程来求解超静定结构内力的计算方法。
超静定结构多余约束(或多余未知力)的数目称为超静定次数,用n表示。
确定超静定次数的方法是:取消多余约束法,即去掉超静定结构中的多余约束,使原结构变成静定结构,所去掉的多余约束的数目即为原结构的超静定次数。
在结构上去掉多余约束的方法,通常有如下几种:●切断一根链杆,或者移去一个支座链杆,相当于去掉一个约束;●将一个固定支座改成固定铰支座,或将受弯杆件某处改成铰接,相当于去掉一个抗转动约束;●去掉一个联结两刚片的铰,或者撤去一个固定铰支座,相当于去掉两个约束;●将一梁式杆切断,或者撤去一个固定支座,相当于去掉三个约束。
现以图1-26a所示一次超静定结构为例,说明力法的基本原理。
其中,要特别重视力法的三个基本概念。
图1-261、力法的基本未知量:取超静定结构中的多余未知力(如图1-26a 中的X1)作为力法的基本未知量,以X i表示。
多余未知力在超静定结构内力分析中处于关键的地位,因此,有必要将其突出出来,作为主攻目标。
力法这个名称也因此而得。
2、力法的基本体系:将原结构中的多余约束(如图1-26a中的支座B)去掉,所得到的无任何外加因素的结构,称为力法的基本结构(图1-26b);基本结构在荷载和多余未知力共同作用下的体系,称为力法的基本体系(图1-26c)。
在基本体系中,仍然保留原结构的多余约束反力X1,只是把它由被动力改为主动力,因此基本体系的受力状态与原结构完全相同。
1超静定结构的解法超静定结构是指结构的支座反力数目多于静力平衡方程的数目,即结构的自由度多余零,不能通过直接求解静力平衡方程得到结构的内力、位移等参数。
因此,需要使用超静定结构的解法来求解结构的响应。
超静定结构的解法主要有两种:力法和位移法。
在这里,我将分别介绍这两种方法的基本原理。
1.力法力法是指通过引入虚功原理,利用未知内力的线性平衡方程组与已知荷载、位移或位移力系数之间的关系,构建方程并求解未知内力的方法。
使用力法解决超静定结构的基本步骤如下:(1)确定支座反力。
根据结构的约束条件,计算支座反力数目;(2)选择剪力或弯矩作为未知内力。
在超静定结构中,选择剪力或弯矩作为未知内力比较常见;(3)建立线性平衡方程组。
将剪力或弯矩作为未知量,根据结构的几何条件和约束条件,建立线性平衡方程组;(4)引入荷载、位移或位移力系数。
根据结构的受力情况,将已知荷载、位移或位移力系数引入线性平衡方程组;(5)求解未知内力。
通过求解线性平衡方程组,得到未知内力。
2.位移法位移法是指通过引入位移的概念,利用位移与剪力/弯矩之间的关系,将超静定结构的内力求解问题转化为线性代数方程组的求解问题。
使用位移法解决超静定结构的基本步骤如下:(1)确定支座反力。
根据结构的约束条件,计算支座反力数目;(2)选择支座位移为未知量。
在超静定结构中,支座位移比较容易确定;(3)建立位移-力关系方程。
根据结构的几何条件和材料性质,建立位移-力关系方程,将剪力或弯矩表示为位移的函数;(4)引入荷载或位移。
根据结构的受力条件,将已知荷载或位移引入位移-力关系方程;(5)求解未知位移。
通过求解位移-力关系方程,得到未知位移;(6)求解未知内力。
将未知位移代入位移-力关系方程,求解出未知内力。
需要注意的是,在力法和位移法中,由于超静定结构的自由度数目大于零,未知内力或未知位移存在无穷多个解。
因此,需要加入合理的边界条件,如位移边界条件、力边界条件等,来确定唯一的解。
力法、位移法求解超静定结构讲解超静定结构是指在静力学计算中具有过多约束的结构体系,其问题在于不能通过传统的静力学方法直接计算出结构体系的内力以及位移的分布情况,需要利用力法或者位移法来求解超静定结构。
力法是指将结构体系的内力分配给各个构件,然后根据各个构件的受力情况和变形情况,逐步推导出结构体系的内力和位移分布情况的一种方法。
其基本思想是通过外部荷载作用下的内力分配,将超静定结构分解成多个静定结构分析,同时通过协调各个分析时的界面条件,进行内力和位移的匹配,最终得到了超静定结构的内力和位移分布情况。
具体实现步骤如下:1. 选定一个自由图,并对该自由图进行划分,将超静定结构分成多个静定结构,其中每个静定结构的节点数均满足有一个自由度。
分割完毕后,确定每个静定结构的支座反力,然后由每个静定结构自己采用传统的静力学原理分析,并得到各自的内力和位移。
2. 对于静定结构之间的相互配合,需要根据结构体系的受力变形情况建立相互之间的协调关系。
最常用的协调方法是确定静定结构之间的界面条件,如节点位移和节点荷载的相等,以及弹簧刚度之和等于零。
3. 在确定了静定结构之间的界面条件后,就可以获得超静定结构的结构内力分布,接下来需要计算出结构的位移分布。
这一步可以通过位移影响系数法进行求解,具体来说,先在静定结构中确定一个位移分量,然后根据约束条件求得其余节点的位移分量,最终获得超静定结构的位移分布。
相比于力法,位移法的思路更加简洁明了,具体步骤如下:1. 建立超静定结构的初始刚度方程,包括构件中的整体刚度和节点位移自由度的边界条件等。
2. 将超静定结构受到的外载按照一定的规律进行分配,使得该结构从受力变形的点出发经过一系列刚度修正后,其总体刚度等于原结构的刚度。
这个修正过程是迭代的,一般采用迭代矩阵求逆的方式进行求解。
3. 当总体刚度修正后,结构的总位移就变为了一个已知量。
根据节点位移自由度的边界条件,可以直接解出各节点的位移分量。