带扩张观测器的新型滑模导引律
- 格式:pdf
- 大小:368.79 KB
- 文档页数:6
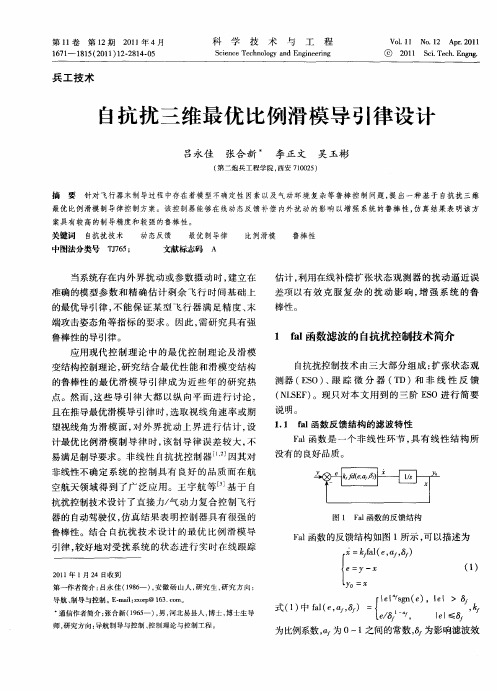


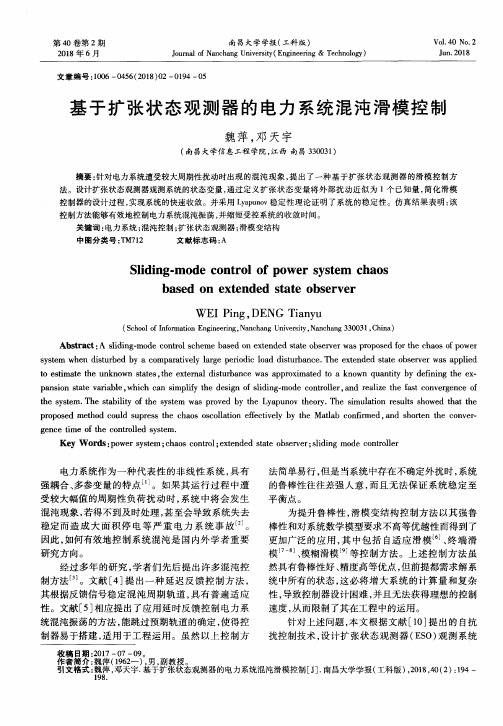
第40卷第10期2023年10月控制理论与应用Control Theory&ApplicationsV ol.40No.10Oct.2023 Buck变换器的改进型互补滑模控制蔡中泽,曾庆双†,孙谷昊(哈尔滨工业大学航天学院,黑龙江哈尔滨150006)摘要:针对Buck变换器系统中存在匹配和不匹配干扰的问题,本文提出了一种基于干扰观测器(DOB)的改进型互补滑模控制(CSMC)策略.首先,建立存在多重干扰的Buck变换器数学模型,将模型改写为标准二阶积分型控制对象,将式中干扰统一为匹配干扰和不匹配干扰.其次,设计2个DOB分别估计匹配干扰和不匹配干扰,实现有限时间内跟踪干扰信号,以抵消各种不确定性对系统的影响.然后,设计互补滑模面,提出基于等效控制的改进型互补滑模控制律,保留边界层内鲁棒性的同时,提升控制器的动态性能,减小静态误差,拓宽边界层参数选择范围.最后,基于李雅普诺夫理论证明所提出控制器的稳定性.数字仿真表明,提出的改进型CSMC控制器结合DOB的总体控制方案能够有效抑制系统匹配和不匹配干扰,同时获得更快的收敛速度以及更高的跟踪精度.关键词:Buck变换器;匹配和不匹配干扰;干扰观测器;改进型互补滑模控制;鲁棒性;李雅普诺夫稳定引用格式:蔡中泽,曾庆双,孙谷昊.Buck变换器的改进型互补滑模控制.控制理论与应用,2023,40(10):1873–1879DOI:10.7641/CTA.2023.20365Improved complementary sliding mode control for Buck converterCAI Zhong-ze,ZENG Qing-shuang†,SUN Gu-hao(School of Astronautics,Harbin Institute of Technology,Harbin Heilongjiang150006,China) Abstract:An improved complementary sliding mode control(CSMC)strategy based on the disturbance observer(DOB) is proposed in this paper to solve the control problem of Buck converter system with matched and mismatched disturbance. Firstly,the mathematical model of Buck converter with many kinds of disturbance was established,we rewrite it to a stan-dard second-order cascade control system.The lumped disturbance in the formula was combined,separately,as matched and mismatched disturbances.Secondly,two DOBs are designed to estimate the matched and mismatched disturbance respectively in the system equation,which can track the disturbance signal infinite time,so the controller can suppress the influence of various uncertainties in the system.Then,the complementary sliding mode surface is designed and an improved complementary sliding mode reaching law based on the equivalent control is proposed,which preserves the robustness in-side the boundary layer,improves the dynamic performance of the controller,reduces the static error,and broadens the selection range of boundary layer parameter.Finally,the stability of the controller is proved based on the Lyapunov theory. Digital simulation shows that the proposed improved CSMC controller combined with DOB can effectively suppress the matched and mismatched disturbance,achieve a faster convergence rate and higher tracking accuracy.Key words:Buck converter;matched and mismatched disturbances;disturbance observer;improved complementary sliding mode control;robustness;Lyapunov stabilityCitation:CAI Zhongze,ZENG Qingshuang,SUN Guhao.Improved complementary sliding mode control for Buck converter.Control Theory&Applications,2023,40(10):1873–18791引言近年来,微电网技术快速发展,其中,分布式可再生能源所占比重逐渐增大,Buck变换器在其中发挥着重要作用.Buck变换器是一种电力电子设备,广泛应用于电动汽车[1]、光伏系统[2]、直流电机驱动器[3]、时变电源和负载的电压调节系统[4]等.由于存在开关操作,Buck变换器也是一个混沌的、时变的非线性系统,因此在某些情况下对变换器进行控制是很困难的. Buck变换器的主要控制目标是将输出电压迅速准确地调节到参考值.由于工况存在各种不确定性和外部扰动,如元件参数摄动、负载变化等,复杂的不确定性对Buck变换器的正常工作产生很大的影响,同时,一些特殊应用场景对Buck变换器控制系统的动态响应和稳态误差提出了更高的要求.因此,如何在系统中收稿日期:2022−05−07;录用日期:2023−03−10.†通信作者.E-mail:****************.cn;Tel.:+86451-86402350-4102.本文责任编委:张承慧.国家自然科学基金项目(61673130)资助.Supported by the National Natural Science Foundation of China(61673130).1874控制理论与应用第40卷存在多重干扰下,保证Buck变换器的鲁棒性,提升系统性能指标,成为学者们的研究焦点.比例–积分–微分控制(proportional-integral-deri-vative control,PID)是Buck变换器应用最广泛的控制策略[5].文献[6]利用反馈线性化方法,建立平衡点小邻域内的线性化信号模型,实现系统的闭环稳定性.然而这两种方法对干扰相对敏感,线性化方法并不能有效地抑制非匹配干扰.为此,学者们针对该问题提出了多种非线性控制策略,如自适应控制[7]、模型预测控制[8]、Backstepping反步控制[9]、分级控制[10]、H∞控制[11]、滑模控制[12–13](sliding mode control,S-MC)等.在这些非线性控制策略中,SMC策略受到了广泛的关注.文献[14]针对非线性系统提出了非奇异快速终端滑模控制,文献[15]利用扩张状态观测器处理匹配干扰,进一步提升了系统的鲁棒性和动态性能,但不能有效抑制不匹配干扰.文献[16]提出了新型干扰观测器,解决了不匹配干扰抑制问题.文献[17]将SMC与迭代学习控制相结合用于永磁同步电机控制系统,改善了系统的鲁棒性,但其中高增益的切换控制项存在会使系统产生严重的抖振,且只适用于抑制系统周期性扰动,可能会放大非周期性随机误差.文献[18]提出互补滑模控制(complementary sliding mo-de control,CSMC)和自适应律结合的算法,有效削弱了抖振,减小了系统跟踪误差.文献[19]结合CSMC和迭代学习控制,提升了电机控制系统的性能.文献[20]提出了基于干扰观测器(disturbance observer,DOB)和普通多幂次趋近律的控制算法,文献[21]提出基于DOB的分数阶SMC控制算法.根据以上分析,本文提出了一种基于DOB的改进型互补滑模控制器,提出的DOB能够有限时间追踪系统匹配和不匹配干扰,同时设计互补滑模面和新型互补滑模控制算法,有效提高了系统的鲁棒性和动态性能,得到更高精度的稳态跟踪误差.2Buck变换器数学模型一般来说,Buck变换器包括电源输入环节(V in)、切换器(S w)、二极管(D)、电感(L)、电容(C)、负载电阻(R),如图1所示.图1Buck变换器框图Fig.1Block diagram of Buck converter理想情况下,当切换器S w状态为ON时,系统的数学模型可以写为d i Ld t=1L(V in−v0),d v0d t=1C(i L−v0R),(1)当切换器S w状态为OFF时,系统的数学模型可以写为d i Ld t=−v0L,d v0d t=1C(i L−v0R),(2)结合式(1)–(2),得到如下Buck变换器数学模型:d i Ld t=1L(µV in−v0),d v0d t=1C(i L−v0R),(3)式中µ代表切换器,取值为1时代表状态为ON,取值为0时状态为OFF.控制器U决定µ的取值.由于实际系统中始终存在负载变化和外部扰动等不确定性,这会导致控制对象的实际数学模型与理想模型存在偏差.因此本文考虑实际工作状态,建立如下存在干扰的数学模型:d i Ld t=1L0+∆L(µ(V in0+∆V in)−v0)+d1(t),d v0d t=1C0+∆C(i L−v0R0+∆R)+d2(t),(4)其中:L0,C0,R0,V in0是Buck变换器内部元件的标称参数值,∆L,∆C,∆R,∆V in是元件在工况中可能存在温度变化或输入电压波动导致的参数摄动,d1(t)和d2(t)是系统作用直接在电流通道和电压通道上的总扰动,包括复杂的未建模动态和外部干扰.假设1未知干扰d1(t)和d2(t)有界.将模型的干扰项合并,得到系统的数学模型为d i Ld t=1L0(µV in0−v0)+D2(t),d v0d t=1C0(i L−v0R0)+D1(t),(5)其中:D1(t),D2(t)表示为D2(t)=µ∆V in L0−µ∆LV in0+∆Lv0(L0+∆L)L0+d1(t), D1(t)=v0∆RR0(R0+∆R)(C0+∆C)+v0∆C−i L∆CR0C0R0(C0+∆C)+d2(t).注1由式(5)可知,系统存在匹配干扰和不匹配干扰,传统的滑模变结构控制器不能够很好地处理不匹配干扰[16].本文的目标是设计基于DOB的新型互补滑模控制器,使Buck变换器输出电压v0能够在不匹配干扰第10期蔡中泽等:Buck变换器的改进型互补滑模控制1875 w1(t)和匹配干扰w2(t)的作用下,跟踪理想输入参考电压信号v ref.3DOB设计为直观起见,本节将式(5)变换为如下二阶积分标准型控制对象:{˙x1=x2+w1(t),˙x2=f(x1,x2,t)+gu+w2(t),(6)式中:x1=v0,x2=1C0(i L−V0R0),f(x1,x2,t)=−1C0L0x1−1C0R0x2,g=V in0C0L0,w1(t)=D1(t),w2(t)=1C0D2(t)−1C0R0D1(t).注2显然,控制增益g>0,在假设1的前提下,存在正常数w∗1和w∗2使得w∗1=supt>0|w1(t)|,w∗2=supt>0|w2(t)|成立.假设2干扰函数w1(t)一阶可微且导数有界,满足limt→+∞˙w1(t)=0,w∗1d=supt>0|˙w1(t)|.将系统状态方程(6)的2个微分方程分别看做2个观测对象,则匹配干扰w1和不匹配干扰w2可分别利用不同阶数的DOB进行观测.根据文献[22],˙x1式的阶数j是2,˙x2式的阶数j为1,可以建立如下干扰观测器:˙z01=v01+x2,v01=−λ01L131|z01−x1|23sgn(z01−x1)+z11,˙z11=v11,v11=−λ11L121|z11−v01|12sgn(z11−v01)+z21,˙z21=v21,v21=−λ21L1sgn(z21−v11)(7)和˙z12=v12,v12=−λ12L2sgn(z12−v02),˙z02=v02+f(x1,x2,t)+gu,v02=−λ02L122|z02−x2|12sgn(z02−x2)+z12,(8)其中:DOB状态量为z ij,i=1,2,3,j=1,2,其中,z01, z11,z21,z02,z12分别是x1,w1,˙w1,x2,w2的观测值,定义干扰观测器误差为e01=z01−x1,e11=z11−w1,e21=z21−˙w1,e02=z02−x2,e12=z12−w2,(9)由文献[22]可知,若观测器输入信号x1(t),x2(t),u(t)勒贝格可测且有界,跟踪信号w1(t),w2(t)满足假设1和2,ϵ为任意正常数,那么存在充分大的参数λij,i= 1,2,3,j=1,2,使得系统能够在有限时间内建立如下不等式:e01 µ01ϵ,e11 µ11ϵ23,e21 µ21ϵ13,e02 µ01ϵ,e12 µ11ϵ12,(10)式中:µij依赖于λij,i=1,2,3,j=1,2的选择,为正常数.显然,本节提出的干扰观测器(7)–(8)能够在有限时间内实现e ij→0,即跟踪误差信号w1,w2和˙w1. 4CSMC设计CSMC的设计过程与传统滑模控制一样,分为2个步骤:设计滑模面和设计控制律.定义Buck变换器跟踪误差为e=x1−v ref.(11) 4.1互补滑模面设计为满足Buck变换器系统的高精度控制设计要求,本节引入互补滑模控制器替代传统滑模控制.互补滑模面能够显著减小滑模变量S的误差[23],满足系统高精度要求的同时保证系统的鲁棒性.互补滑模的目的是使变量e(t),˙e(t)和te(t)沿积分滑模和互补滑模面的交集向零点收敛,达到稳定.设计如下广义滑模面:S g=(p+β)nte(τ)dτ,(12)式中:p=dd t是微分算子,β>0是滑模面常数,n是设计互补滑模面阶数,则空间中与其正交的互补滑模面定义为S c=(p+β)n−1(p−β)te(τ)dτ,(13)本文控制对象为二阶系统,所以n=2,得到如下广义滑模面:S g(t)=˙e+2βe+β2te(τ)dτ,(14)互补滑模面设计为S c(t)=˙e−β2te(τ)dτ,(15)1876控制理论与应用第40卷由式(14)–(15),可以得到2个滑模面之间的关系为˙Sc (t )+βS (t )=˙S g (t ),(16)其中:S (t )是滑模面之和,即S (t )=S c (t )+S g (t ).4.2控制器设计基于等效控制方法,设计滑模控制器u (t )=u eq +u rl ,(17)其中:u eq =−1g [f (x 1,x 2,t )+z 12+z 21−¨v ref +β(2˙e (t )+βe (t )+S g (t ))],u rl =−1g[ζ|S |ψsgn S +k ∗sgn S ],式中:ζ和k ∗是正常数,sgn 为符号函数,ψ为边界层参数,表示为ψ={υ,|S |<ϕ,0,|S | ϕ,其中ϕ为小正常数.控制系统框图如图2所示.[11 [21 [12图2Buck 变换器闭环控制系统框图Fig.2Closed-loop control system block diagram of Buckconverter 注3[23]应用二阶互补滑模面的控制器相比传统滑模面能够减少12的系统稳态误差.系统(6)在不考虑干扰的情况下,当控制输入为式(17)时,状态点在滑模面(13)及其邻域Φ内运动时,其误差边界为|e (i )| 12(2β(i ))Φβ,i =0,1.(18)注4注意到本节采用了不同于文献[18,20]的sat 函数来代替切换函数,虽然连续可微的sat 函数能够有效减小由高增益切换环节带来的抖振影响,但是同时会使整个控制器失去在边界层内的鲁棒性.针对固有高频切换属性的Buck 变换器,其系统中存在多种干扰,使用sat 函数可能会导致系统稳态误差增大,调整时间变长,而且其对饱和函数的边界选取过于激进,文献[24]将边界值选取为0.001,在实际工程中很难实现.因此,本文采用改进型幂次趋近律配合切换控制项sgn S .分别设计参数,当|S |远离滑模面时,幂次项的存在能有效提升远端趋近速度.当|S |逼近滑模面上,幂次项也能够显著减小sgn S 项的增益k ∗,达到减小抖振的目的.5稳定性证明本节基于Lyapunov 稳定性理论,证明控制系统的稳定性.定理1针对存在干扰的Buck 变换器(6),基于干扰观测器(7)–(8)和互补滑模控制(15)(17)的控制器能够实现对系统参考输入电压v ref 的有限时间跟踪.证定义如下Lyapunov 函数:V =12S 2c +12S 2g ,(19)对式(19)求导可得˙V=S g ˙S g +S c ˙S c =S g ˙S g +(S −S g )(˙S g −βS )=S (˙Sg −βS c )=S (¨e +2β˙e +β2e −βS +βS g ),(20)将上式代入式(11)(17)可得˙V =S (−βS +f (x )+gu +w 2+˙w 1−¨v ref +β(2˙e +βe +S g ))=S (−βS −e 12−e 21−ζ|S |ψsgn S −k ∗sgn S ),(21)DOB 跟踪误差e 12,e 21将在有限时间内收敛至零,因此上式变为˙V=S (−βS −ζ|S |ψsgn S −k ∗sgn S )=−βS 2−ζ|S |ψ+1−k ∗|S | 0,(22)式中:|S | ϕ时,k ∗,ζ为正值,这确保了任意初始的位置跟踪误差都能在有限时间内到达边界层,使得|S | ϕ.此外,根据注3,位置跟踪误差的最终边界限定为|e | ϕ2β,|˙e | ϕ,根据以上论述,2个滑模面(S g ,S c )在控制作用下均能够趋近于0,满足滑模面到达条件,那么始于边界层外的跟踪误差能够在趋近律的作用下有限时间内到达边界层,且沿着2个滑模面的交集(S g =S c =0)向平衡点的邻域滑动,使误差变量e (t ),˙e (t )和 te (t )向零点的邻域收敛.因此,可以保证CSMC 系统的稳定性和在有限时间内封闭区域的跟踪误差的收敛性.此外,与传统SMC 系统相比,系统的瞬态响应也有所改善,因为2个滑动面可以看作是相互独立的,而2个滑动面的交面约束了系统的状态轨迹.令跟踪误差在系统始终存在匹配和不匹配干扰的情况下实现有限时间收敛.证毕.6仿真验证本节基于数字仿真平台,建立Buck 变换器完整控制模型,进行仿真并分析结果.Buck 变换器的各项参数如表1所示,设定系统的参考输出电压v ref =10V.第10期蔡中泽等:Buck 变换器的改进型互补滑模控制1877表1Buck 变换器参数Table 1Parameters of Buck converter元件符号单位标准值输入电压V in V 20负载电阻R 0Ω100电感L 0mH 2.0电容C 0mF1.1DOB 的各项参数如表2所示.表2干扰观测器参数Table 2Parameters of DOBDOB1DOB2λ01=2λ02=2λ11=1.5λ12=3λ21=2–L 1=1200L 2=70控制器的各项参数如表3所示.表3CSMC 控制器参数Table 3Parameters of CSMC controller参数β=20ζ=10k ∗=10ψ=1ϕ=0.16.1DOB 跟踪性能分析Buck 变换器在工作中始终存在多重干扰,为合理分析本文提出DOB 的跟踪性能,不失一般性地,令w 1=2cos t +0.5+0.1x 1+0.5x 2,w 2=0.5sin t +1.DOB 跟踪误差如图3–5所示.12345U / s3020 100102030 3.23.4 3.60.020.000.02F 11图3w 1跟踪误差Fig.3Tracking error of w 1显然,干扰观测器能够在有限时间内跟踪匹配干扰w 1和不匹配干扰w 2,跟踪误差在允许范围内.对比跟踪误差曲线可知,图4跟踪误差信号˙w 1时,稳态误差明显增大,这是由于˙w 1信号中包含控制信号的高频切换成分,实际工作模型中没有w 1的导数这一项,对二阶DOB 的性能要求更高,因此,相比较图3和图5,图4的跟踪误差更大,但是基于DOB 收敛性分析,此仿真结果依然在合理范围内,在滑模控制器中,会根据状态分析合理地设定控制器参数.500500100015003.23.43.6202U / s12345F 21图4˙w 1跟踪误差Fig.4Tracking error of ˙w 13.503.55 3.600.20.00.21.00.50.00.51.012345U / sF 12图5w 2跟踪误差Fig.5Tracking error of w 26.2含有DOB 的CSMC 控制器误差分析保持上述干扰信号w 1=2cos t +0.5+0.1x 1+0.5x 2,w 2=0.5sin t +1不变,利用本文提出基于DOB 的CSMC 控制器进行仿真.传统SMC 控制器并不能有效抑制非匹配干扰,因此,本节采用传统滑模控制(traditional SMC,TSMC)和DOB 的控制方案作为对比.DOB 参数不变如表2所示,传统SMC 控制器及滑模面定义为S T =˙e +ce,u T =−1g[f (x 1,x 2,t )+z 12+z 21+cx 2+2z 11+k t sgn S ].其中:c =40,k t =400和50.仿真结果如图6所示.根据图6可以看出,在有匹配干扰和不匹配干扰的情况下,引入DOB 的传统SMC 控制器能够有效跟踪参考电压,TSMC 利用DOB 跟踪信号对干扰动态补偿,这解决了TSMC 不能够处理不匹配干扰的问题.本文1878控制理论与应用第40卷提出的CSMC 控制器提供了更快的收敛速度和更高的稳态精度,同时对控制器里的切换环节sgn 的增益要求更小,TSMC 控制在k t =50时调整速度慢,稳态误差高,而且在不匹配干扰的作用下,尽快能够收敛,但仍存在稳态中的输出波动,将增益提升到k t =400后,系统的跟踪速度显著提升,稳态误差也减小,但仍然不如本文提出的改进型CSMC 控制器,而且这对控制信号的幅值提出了更高的要求,在实际工程操作中,控制信号不可能太大,因此改进型CSMC 控制器解决了这个问题.一方面是由于互补滑模控制器的选择理论上减小了误差边界,另一方面是其引入了误差的积分项,这加快了u 的调整速度,提升了系统的静态性能.02468101214CSMCTSMSC, L U =400TSMSC, L U =503.00 3.05 3.109.9510.00012345U / sW 0 / V图6v 0跟踪曲线Fig.6Tracking curves of v 06.3Buck 变换器负载电阻变化仿真Buck 变换器在实际工作中不可避免地受到环境干扰,存在负载电阻波动或PWM 输入电压波动干扰,这会导致Buck 变换器实际模型偏离理想模型,产生误差.因此,针对负载电阻由于温度不稳定而变化的情况,对系统进行仿真.假设负载电阻R 0在t =2s 时刻减少至50Ω,在t =4s 时刻恢复到标准值100Ω,仿真结果如图7所示.123456U / s024681012TCSMC CSMSC291041011W 0 / V图7v 0跟踪曲线Fig.7Tracking curves of v 0仿真结果表明,所使用的两种控制器均能在负载电阻突变的情况下有效跟踪系统参考输入电压v ref ,由于TSMC 控制器中切换环节sgn 的增益k t =50时,系统调整速度过慢,因此此环节仅对比CSMC 和TS-MC 的控制效果.显然,本文提出的基于DOB 的改进互补滑模控制器提供了更快的收敛速度和更小的电压波动.上节表明稳态情况下CSMC 控制器提供更小的误差,不再赘述.同应的,控制信号u 也调整的更为迅速,仿真可见图8.123456U / s0.00.20.40.60.8TCSMC CSMSC240.550.50V0.500.45图8控制u 跟踪曲线Fig.8Tracking curves of control signal u需要注意的是,负载电阻变化的同时,仿真依旧存在匹配和不匹配干扰,这也证明了DOB 的性能和基于DOB 的互补滑模控制器的稳定性.7结论本文设计了基于DOB 的Buck 变换器改进型CS-MC 控制方案,通过分析Buck 变换器中存在的参数摄动和内外扰动的问题,将控制模型变换为存在匹配和不匹配干扰的二阶积分模型,利用DOB 估计模型中的扰动,解决了TSMC 不能有效抑制不匹配干扰的问题.根据Buck 变换器系统特性,提出更有针对性的CSMC 算法,改进了趋近律,使系统在滑模边界层内不失去鲁棒性的同时,拓宽了边界层厚度的选取范围,提升了系统动态性能.数字仿真结果证明了提出DOB 的跟踪性能,设计的控制器在多重干扰作用下保证了系统的稳定性,减小了系统的稳态误差,得到了比CSMC 更快的动态响应速度.参考文献:[1]FANG Y ,KONG H,LIU T.Nonlinear disturbance observer-basedsliding mode control for the PMSM with matched and mismatched disturbances.Mathematical Problems in Engineering ,2020,2020:8837101.[2]AYOP R,TAN C W.Rapid prototyping of photovoltaic emulatorusing buck converter based on fast convergence resistance feed-back method.IEEE Transactions on Power Electronics ,2018,34(9):8715–8723.[3]CHEN X,LIU G.Sensorless optimal commutation steady speed con-trol method for a non-ideal Back-EMF BLDC motor drive system in-第10期蔡中泽等:Buck变换器的改进型互补滑模控制1879cluding Buck converter.IEEE Transactions on Industrial Electronics, 2020,67(7):6147–6157.[4]SALIMI M,SOLTANI J,MARKDEHI G A,et al.Adaptive nonlinearcontrol of the DC-DC buck converters operating in CCM and DCM.International Transactions on Electrical Energy System,2013,23(8): 1536–1547.[5]WANG Z,LI S,LI Q.Continuous nonsingular terminal sliding modecontrol of DC-DC boost converters subject to time-varying disturb-ances.IEEE Transactions on Circuits and Systems II-Express Briefs, 2020,67(11):2552–2556.[6]SRIRAM V B,SENGUPTA S,PATRA A.Indirect current control ofa single-phase voltage-sourced boost-type bridge converter operatedin the rectifier mode.IEEE Transactions on Power Electron,2003, 18(5):1130–1137.[7]BABAZADEH A,MAKSIMOVIC D.Hybrid digital adaptive controlfor fast transient response in synchronous buck DC-DC converters.IEEE Transactions on Power Electron,2009,24(11):2625–2638.[8]XU Q,YAN Y,ZHANG C.An offset-free composite model predic-tive control strategy for DC/DC buck converter feeding constant pow-er loads.IEEE Transactions on Power Electron,2020,35(5):5331–5342.[9]ZHANG C L,WANY J X,LI S H.Robust control for PWM-basedDC-DC buck power converters with uncertainty via sampled-data output feedback.IEEE Transactions on Power Electron,2015,30(1): 504–515.[10]SILV A O,HERNNDEZ V,ANTONIO C.DC/DC buck power con-verter as a smooth starter for a DC motor based on a hierarchical control.IEEE Transactions on Power Electron,2015,30(2):1076–1084.[11]BOUKERDJA M,CHOUDER A,HASSAINE L.H∞based controlof a DC/DC buck converter feeding a constant power load in uncer-tain DC microgrid system.ISA Transactions,2020,105:278–295.[12]LIU L,ZHENG W X,DING S.An adaptive SOSM controller designby using a sliding-mode-basedfilter and its application to Buck con-verter.IEEE Transactions on Circuits and Systems I-Regular Papers, 2020,67(7):2409–2418.[13]YIN Y.Advanced control strategies for DC-DC buck converters withparametric uncertainties via experimental evaluation.IEEE Trans-actions on Circuits and Systems I-Regular Papers,2020,67(12): 5257–5267.[14]YANG L,YANG J.Nonsingular fast terminal sliding-mode controlfor nonlinear dynamical systems.International Journal of Robust and Nonlinear Control,2011,21(16):1865–1879.[15]WANG Shuwang,LI Shengquan,AI Wei,et al.Chattering freesliding mode control based on reduce order extended state observ-er method for a DC-DC Buck converter system.Control Theory& Applications,2021,38(6):766–774.(王书旺,李生权,哀薇,等.Buck变换器的降阶扩张状态观测器与无抖振滑模控制.控制理论与应用,2021,38(6):766–774.)[16]YANG J,LI S H,YU X H.Sliding-mode control for systems withmismatched uncertainties via a disturbance observer.IEEE Transac-tions on Industrial Electronics,2013,60(1):160–169.[17]CHEN M Y,LU J S.High-precision motion control for a linear per-manent magnet ironcore synchronous motor drive in position plat-form.IEEE Transactions on Industrial Informatics,2014,10(1): 99–108.[18]SU J P,WANG C plementary sliding control of non-linear-systems.International Journal of Control,2002,75(5):360–368.[19]JIN Hongyan,ZHAO Ximei.Speed control of permanent magnet lin-ear synchronous motor based on complementary sliding mode control and iterative learning control.Control Theory&Applications,2020, 37(4):918–924.(金鸿雁,赵希梅.基于互补滑模控制和迭代学习控制的永磁直线同步电动机速度控制.控制理论与应用,2020,37(4):918–924.)[20]WANG Kun,WANG Jianmei,WANG Fang,et al.Sliding mode con-trol for nonlinear system with mismatched uncertainties and applica-tion in motor control.Control Theory&Applications,2019,36(1): 143–150.(王坤,王建美,王芳,等.非匹配不确定系统的滑模控制及在电机控制中的应用.控制理论与应用,2019,36(1):143–150.)[21]LIN X,LIU Y,LIU F,et al.Fractional-Order sliding mode approachof Buck converters with mismatched disturbances.IEEE Transactions on Circuits and Systems I-Regular Papers,2021,68(9):3890–3900.[22]SHTESSEL Y B,SHKOLNIKOV I A,LEV ANT A.Smooth sec-ondorder sliding modes:Missile guidance application.Automatica, 2007,43(8):1470–1476.[23]JIN Hongyan.Research on complementary sliding mode controlstrategy for high precision permanent magnet linear synchronous mo-tor.Shenyang:University of Technology,2021.(金鸿雁.高精度永磁直线同步电动机互补滑模控制策略研究.沈阳:沈阳工业大学,2021.)[24]ZHAO Ximei,LIU Chao,ZHU Guoxin.Adaptive complementarysliding mode control for permanent magnet linear synchronous mo-tor.Electric Machines and Control,2020,24(7):39–47.(赵希梅,刘超,朱国昕.永磁直线同步电机自适应非线性滑模控制.电机与控制学报,2020,24(7):39–47.)作者简介:蔡中泽博士研究生,主要研究方向为滑模控制理论及其应用, E-mail:**************;曾庆双博士,教授,博士生导师,主要研究方向为惯导测试设备关键技术,E-mail:****************.cn;孙谷昊博士研究生,主要研究方向为智能无人机安全控制,E-mail:*************.cn.。

D驱动控制rive and control 2020年第48卷第4期张苏英等 基于新型趋近律的永磁同步电机滑模速度控制50 收稿日期:2018-07-18基金项目:国家自然科学基金项目(51507048)基于新型趋近律的永磁同步电机滑模速度控制张苏英,王跃龙,刘慧贤,孟 月(河北科技大学电气工程学院,石家庄050018)摘 要:系统惯性和切换开关的时间滞后造成了滑模控制系统的抖振问题㊂为了解决该问题,提高永磁同步电机调速系统的动态品质,设计了新型趋近律㊂趋近律引入了系统状态变量绝对值的反正切函数,减小接近滑模面时的速度㊂用变边界层饱和函数代替常规的符号函数,使滑模面附近沿滑模面的运动更平滑㊂负载转矩是滑模速度控制器中的一个扰动项,采用以转矩和转速为观测对象的扩展滑模观测器对负载转矩进行观测,将观测值引进滑模速度控制器进行前馈补偿,进一步提高控制系统的抗扰性㊂仿真结果表明,改进后的趋近律在减小滑模面趋近时间的同时,有效地削弱了系统的抖振㊂负载转矩观测器在负载阶跃变化时能够进行准确的跟踪㊂相较于传统的指数趋近律滑模控制,基于新型趋近律的滑模控制响应速度快㊁无超调㊁抗扰性强,能够实现永磁同步电机良好的调速动态品质㊂关键词:永磁同步电机;滑模控制;变边界层饱和函数;负载转矩观测器中图分类号:TM351 文献标志码:A 文章编号:1004-7018(2020)04-0050-05Sliding Mode Speed Control of Permanent Magnet Synchronous Motor Based on New Reaching Law ZHANG Su -ying ,WANG Yue -long ,LIU Hui -xian ,MENG Yue(College of Electrical Engineering,Hebei University of Science and Technology,Shijiazhuang 050018,China)Abstract :The system inertia and the time lag of the switching switch cause the buffeting problem of the sliding modecontrol system.In order to solve this problem and improve the dynamic quality of the permanent magnet synchronous motor speed control system,a new reaching law was designed.The reaching law introduced the arc tangent function of the absolutevalue of the system state variable,reducing the speed near the sliding surface.The variable boundary layer saturation func⁃tion was used instead of the conventional symbol function to make the movement near the sliding surface and along the slid⁃ing surface smoother.The load torque was a disturbance item in the sliding mode speed controller.The extended slidingmode observer with the torque and rotation speed as the observation object was used to observe the load torque,and the ob⁃servation value was introduced into the sliding mode speed controller for feed-forward compensation to further improve thecontrol system's immunity.The simulation results show that the improved reach law can effectively reduce the chattering ofthe system while reducing the approach time of the sliding mode surface.The load torque observer can track accurately whenthe load step pared to the traditional exponential reaching law sliding mode control,the sliding mode controlbased on the new reaching law has fast response speed,no overshoot and strong anti-disturbance performance,which canrealize the good dynamic quality of speed regulation of permanent magnet synchronous motor.Key words :permanent magnet synchronous motor,sliding mode control,variable boundary layer saturation function,load torque observer0 引 言永磁同步电机结构简单㊁运行可靠,在很多领域的交流伺服系统中应用广泛[1]㊂传统的PI 控制算法简单㊁易实现,但控制范围有限㊂永磁同步电机有强耦合㊁非线性等特性,内部参数和负载发生变化时,以PI 控制做速度控制器,速度的调节品质一般[2]㊂为了提高永磁同步电机控制系统的调速特性,研究人员提出了大量的应对策略,如神经网络[3]㊁自适应控制[4-5]㊁预测控制[6]㊁滑模控制[7]等㊂滑模控制具有响应快速㊁鲁棒性强㊁对参数扰动和变化不敏感的特点,因而得到广泛应用[8]㊂文献[9]构造了一种二阶滑模状态观测器,对系统参数进行在线辨识,辨识效果较好㊂但滑模控制存在固有的抖振问题,有效地抑制滑模控制的抖振成为研究热点㊂趋近律的方法在趋近滑模面的过程中对趋近速度加以控制,抖振抑制效果良好[10]㊂常规的趋近律难以精确地控制趋近滑模面的时间和趋近滑模面的速度,无法解决滑模面趋近时间和抖振之间的矛盾[11]㊂文献[12]设计了一种基于新型趋近律的积分模糊滑模变结构速度环控制器,滑模面的设计引入误差信号的积分项,避免控制量对加速度信号 2020年第48卷第4期 D驱动控制rive and control 张苏英等 基于新型趋近律的永磁同步电机滑模速度控制51 的要求㊂文献[13]以传统指数趋近律为基础,引入终端吸引子和系统状态量的幂函数,设计了新型指数趋近律㊂基于新型趋近律设计了滑模速度控制器㊂文献[14]设计的新型指数趋近律的切换增益是一个常量和系统状态的函数,使系统状态快速准确到达滑模面㊂上述三篇文献所设计的控制器均能有效克服滑模控制的抖振现象,提高了趋近速度和系统鲁棒性㊂本文对常规的等速趋近律进行了改进,在减小趋近滑模面时间的同时,减小了趋近滑模面的速度,有效地削弱了抖振㊂用饱和函数代替符号函数可以使系统的运动轨迹被限制在边界层内,实现准滑模控制㊂但边界层的厚度是定值,太大或太小控制结果都不理想㊂设计变边界层饱和函数,使边界层厚度在随系统状态趋近原点的过程中,由大逐渐减小至零,从根本上对抖振进行削弱㊂负载转矩是非电物理量,不能直接测量,突然变化时对系统运行状态产生严重影响[15]㊂利用扩展滑模观测器对负载转矩进行观测,将观测值前馈补偿,进一步削弱系统抖振,加强控制系统的抗扰性[16]㊂1 永磁同步电机的数学模型由于没有异步电机转差率的问题,故三相永磁同步电机的矢量控制实现起来更加方便㊂常见的矢量控制方法有i d =0控制和最大转矩电流比控制,i d =0的控制更适用于本文的表贴式三相永磁同步电机㊂为了便于控制器的设计,选择同步旋转坐标系,其数学模型:u d =Ri d +L dd i dd t-pωm L q i q u q =Ri q +L q d i qd t+pωm L d i d +pωm ψf J d ωmd t=T e -T L -Bωm T e =32pψf i üþýïïïïïïïïïïq (1)式中:u d 和u q 为d ,q 轴的定子电压;i d 和i q 为d ,q 轴的定子电流;L d 和L q 为d ,q 轴的定子电感(表贴式三相永磁同步电机有L d =L q =L );R 为定子电阻;p 为极对数;ωm 为转子机械角速度;ψf 为永磁体磁链;J 为转动惯量;T e 为电磁转矩;T L 为负载转矩[17]㊂2 趋近律控制方法滑模变结构控制系统有位于滑模面外的趋近直至到达滑模面的趋近运动和在滑模面附近并沿着滑模面的运动,即趋近运动和滑模运动2部分构成[18],如图1所示㊂图1 滑模控制系统的2个运动阶段一般的滑模控制只考虑滑模面存在一个B 点,且由A 点能够到达B 点并满足稳定性条件,A 点到达B 点的方式不受控制㊂趋近律的方法规定了A 点到达B 点的趋近方式,保证趋近运动的动态品质㊂2.1 新型趋近律设计系统误差在系统状态趋近滑模面的过程中不能被直接控制,缩短趋近滑模面的时间成为设计趋近律的关键㊂缩短趋近时间,需加快趋近速度;速度过快,又会引起系统抖振,因此,在加快趋近速度的同时,要减小到达滑模面时的速度㊂为此,设计新型趋近律如下:s ㊃=-εarctan Xηe -δssgn(s )(2)式中:X 为系统的状态变量;s 为滑模面;ε,η,δ为大于零的常数㊂当s 较大时,即系统状态距离滑模面较远时,改进后的趋近律等价于下式:s ㊃=-επ2η㊃0+sgn(s )(3) 由式(3)可以看出,ε取很小的值,便可使系统趋近滑模面的速度很快,且s 越大,速度越快㊂η可调节使分母近似为零的系统状态到滑模面的距离㊂当s 较小时,即系统状态距离滑模面较近时,系统状态有可能距原点仍很远㊂利用反正切函数值域的有界性,可以保证速度不会太大,引起系统的抖振㊂设置常数η的大小可进一步对速度进行调节㊂此时的趋近律等价于:s ㊃=-επ2ηsgn(s )(4) 只要η>π2,系统趋近滑模面的速度就会小于ε,且η越大,速度越小,抑制抖振的效果越明显㊂2.2 变边界层饱和函数用饱和函数代替符号函数可以实现准滑模控制,从根本上削弱抖振㊂但常规饱和函数的边界层是固定的,边界层太大,会使原本在原点稳定的系统D驱动控制rive and control 2020年第48卷第4期张苏英等 基于新型趋近律的永磁同步电机滑模速度控制52 重新产生抖振,如图2(a)所示㊂边界层太小,系统在边界层内的运动时间少,失去了使用饱和函数的意义,如图2(b)所示㊂(a)边界层太大(b)边界层太小图2 固定边界层为此,设计如下的变边界层饱和函数:sat(s )=sα㊃arctan Xs <α㊃arctan X sgn(s ) s ≥α㊃arctan {X(5) 状态变量绝对值的反正切函数与常数α(α>0)的乘积作为饱和函数的边界层㊂边界层厚度随状态点趋近于原点而逐渐减小至零,不会影响系统在原点的稳定性㊂可变边界层饱和函数如图3所示㊂图3 可变边界层反正切函数值域的有限性决定了边界层厚度的有限性,不会随状态点到原点距离的增大无限增大,且α值的大小可进一步调节边界层的最大厚度㊂综上,新型趋近律如下:s ㊃=-εarctan X ηe -δssat(s )(6)2.3 新型趋近律的验证以典型系统为例对新型趋近律进行验证,如下:x ㊃1x ㊃éëêêêùûúúú2=01éëêêùûúú00x 1x éëêêùûúú2+0-éëêêùûúú80u (7)取滑模面:s =[251]x 1x éëêêùûúú2(8)求导得:s ㊃=25x ㊃1+x ㊃2(9)取指数趋近律s ㊃=-k sgn(s )-qs (k ,q >0)时有:u =516x 2+180k sgn(s )+180qs (10)取新型趋近律时有:u =516x 2+180εarctan Xηe -δssat(s )(11)式中:k =30;q =300;ε=15;η=2.3;δ=1.3;X =x 1,对两种趋近律进行仿真分析,仿真结果如图4㊁图5所示㊂(a)指数趋近律(b)新型趋近律图4 趋近律仿真由图4可以看出,初始状态相同时,新型趋近律趋近滑模面的时间要优于指数趋近律㊂截取0~0.01的图像,指数趋近律的系统状态在滑模面附近不断切换,抖振明显㊂新型趋近律的系统运动轨迹与滑模面几乎重合,抖振得到有效削弱㊂(a)指数趋近律(b)新型趋近律图5 趋近律仿真放大图3 滑模速度控制器设计滑模速度控制器输入为永磁同步电机的速度跟踪误差e ω,输出为q 轴参考电流i *q ㊂负载转矩T L是滑模速度控制器的一个未知扰动项,需要对其进行观测㊂带负载转矩观测的滑模速度控制器的结构框图如图6所示㊂图6 带负载转矩观测的滑模速度控制器结构框图以永磁同步电机的速度跟踪误差为系统的状态变量,即:X =e ω=ωr -ωm(12)ωr 是人为设定的电机参考转速;ωm 为电机实际转速㊂对式(2)求导后有:X ㊃=-d ωm d t =-3pψf i q 2J +T L J +BωmJ(13) 积分型滑模面可以平滑转矩㊁削弱抖振㊁提高速度调节精度[19]㊂本文采用积分滑模面如下:s =X +c∫t 0X d t(14)对s 求导得: 2020年第48卷第4期 D驱动控制rive and control张苏英等 基于新型趋近律的永磁同步电机滑模速度控制53 s ㊃=X ㊃+cX =-3pψf i q 2J +T L J +BωmJ+cX (15) 由式(15)及新型趋近律可得:i *q =2J 3pψf εarctan |X |ηe-δ|s|sat(s )+T L J +Bωm J éëêêùûúú+cX (16) 由滑模到达条件ss ㊃≤0,可验证在式(16)控制器作用下,系统是渐进稳定的㊂ss ㊃=s (X ㊃+cX ㊃)=-εarctan X ηe -δssat(s )㊃s =-εs 2α㊃ηe -δs s <α㊃arctan X -εarctan X ηe -δss s ≥α㊃arctan ìîíïïïïX(17)从而易证ss ㊃≤0㊂4 负载转矩滑模观测器设计为了提高系统的抗扰性,同时进一步削弱抖振,采用扩展滑模观测器对负载转矩进行观测㊂结构框图如图7所示㊂图7 负载转矩滑模观测器结构图控制器的采样频率远高于负载转矩的变化时间,在控制周期内负载转矩可认为是一恒定值[20]㊂即:d T Ld t=0(18) 结合永磁同步电机数学模型中的运动方程,以电机机械角速度ωm 和负载转矩T L 为状态变量,电磁转矩T e 为输入,输出也为机械角速度ωm ,有如下状态方程:ω㊃m T ㊃éëêêêùûúúúL =-B J -1J éëêêêùûúúú0ωm T éëêêùûúúL +1J éëêêêùûúúú0T e y =[10]ωm T éëêêùûúúüþýïïïïïïL (19)从而有滑模观测器方程:ω^㊃m T ^㊃éëêêêùûúúúL =-B J -1J éëêêêùûúúú00ω^m T ^éëêêùûúúL +1Jéëêêêùûúúú0T e +1éëêêùûúúl U (20)式中:ω^m 为机械角速度估计值;T ^L 负载转矩估计值;l 为反馈增益;U 为滑模控制律㊂式(20)减去式(19),有观测器误差方程:e ㊃1=-B J e 1-1Je 2+U e ㊃2}=lU(21)式中:e 1为速度估计误差,e 1=ω^m -ωm ;e 2为负载转矩观测误差,e 2=T ^L -T L ㊂令滑模切换面s =e 1,有U =-λsgn (s )-γs ㊂由滑模可达条件ss ㊃≤0有:ss ㊃=e 1e ㊃1=e 1-B J e 1-1Je 2-λsgn(e 1)-γe []1≤0(22)式中:B =0,从而有λ≥-γe 1+e 2J,取λ=-γe 1+βe 2J,β≥1㊂系统轨迹到达滑模面并沿着滑模面运动时,s =s ㊃=0,也即e 1=e ㊃1=0㊂结合式(21)可得:e ㊃2-lJ e 2=0(23)可求得:e 2=c e e lJ t(24)式中:c e 为常数,只有满足l <0才能保证e 2趋近于0㊂5 仿真验证为了验证新型趋近律的可行性和滑模负载转矩观测器的准确性,在Simulink 下进行仿真㊂永磁同步电机的参数如表1所示㊂控制方位结构框图如图8所示㊂表1 永磁同步电机参数参数数值参数数值定子电阻R /Ω2.875转动惯量J /(kg㊃m 2)0.008电感L /mH 0.0085阻尼系数B /(N㊃m㊃s)0永磁体磁链ψf /Wb 0.175极对数p4图8 控制系统结构框图基于新型趋近律和负载转矩观测器的PMSM控制系统结构框图如图8所示㊂设置电机的参考转速为800r /min,起动时的负载转矩为10N㊃m㊂在0.2s 时,负载转矩变为18N㊃m㊂负载转矩的实际 D驱动控制rive and control 2020年第48卷第4期 张苏英等 基于新型趋近律的永磁同步电机滑模速度控制 54 值与观测值如图9所示㊂引入负载转矩的基于新型趋近律的滑模控制器作用下的电机转速和指数趋近律滑模控制器作用下的电机转速如图10所示,电磁转矩响应如图11所示,电流响应如图12所示㊂图9 负载转矩的实际值与观测值电机起动时负载转矩为10N㊃m,0.2s时突变到18N㊃m㊂观测值在较短的时间内达到实际值㊂观测器能够对电机负载转矩进行快速准确的跟踪㊂(a)指数趋近律滑模控制(b)新型趋近律滑模控制图10 滑模控制器作用下的电机转速波形(a)指数趋近律滑模控制(b)新型趋近律滑模控制图11 滑模控制器作用下的电磁转矩波形(a)指数趋近律滑模控制(b)新型趋近律滑模控制图12 滑模控制器作用下的电流波形由图10~图12可以看出,基于新型趋近律的滑模控制,的电机转速在0.025s左右达到设定转速,指数趋近律滑模控制控制要到0.05s㊂电磁转矩㊁电流响应在0.025s左右趋于平稳,指数趋近律滑也要到0.05s㊂在0.2s负载增大时,新型趋近律滑模控制使转速㊁转矩㊁电流能在更短的时间恢复平稳,抗扰性优于指数趋近律㊂基于负载转矩观测器的新型趋近律滑模控制相较于指数趋近律滑模控制,响应速度快,无超调且抗扰性和鲁棒性强㊂6 结 语针对滑模控制的抖振问题,设计了新型趋近律和变边界层饱和函数,解决了滑模控制趋近时间和抖振间的矛盾㊂基于新型趋近律和变边界层函数完成了速度控制器的设计,采用负载转矩观测器对负载进行了观测,将观测值引入控制器进行前馈补偿以增强系统抗扰性㊂通过仿真验证了观测器对于负载准确的跟踪能力以及系统在调节时间㊁脉动抑制和抗扰性等调速方面的良好动态品质㊂参考文献[1] 李政,胡广大,崔家瑞,等.永磁同步电机调速系统的积分型滑模变结构控制[J].中国电机工程学报,2014,34(3):431-437.[2] 李峰,夏超英.考虑磁路饱和的内置式永磁同步电机电感参数旋转辨识算法[J].电工技术学报,2016,31(21):203-211. [3] 王同旭,马鸿雁,聂沐晗.电梯用永磁同步电机BP神经网络PID调速控制方法的研究[J].电工技术学报,2015,30(S1): 43-47.[4] 沈宏丽,郭健,樊卫华,等.基于特征模型的电梯用永磁同步电机抗扰动自适应控制[J].电机与控制应用,2018,45(2):1-6.[5] 邓永停,李洪文,王建立,等.基于卡尔曼滤波器的交流伺服系统自适应滑模控制[J].光学精密程,2014,22(8):2088-2095.[6] 徐艳平,王极兵,张保程,等.永磁同步电机三矢量模型预测电流控制[J].电工技术学报,2018,33(5):980-998. [7] 李兵强,陈晓磊,林辉,等.机电伺服系统齿隙补偿及终端滑模控制[J].电工技术学报,2016,31(9):162-168. [8] 毕坤,邵民.基于新型趋近律的永磁同步电动机滑模变结构控制[J].微特电机,2015,43(9):62-65.[9] ZHAO L H,HUANG J,LIU H.Second-order sliding-mode ob⁃server with online parameter identification for sensorless induction motor drives[J].IEEE Transactions on Industrial Electronics, 2014,61(10):5280-5289.[10] JIN N Z,WANG X D,WU X G.Current sliding mode control witha load sliding-mode observer for permanent magnet synchronousmachines[J].Journal of Power Electronics,2014,14(1):105-114.[11] ZHANG X G,SUN L Z,ZHAO K,et al.Nonlinear speed controlfor PMSM system using sliding-mode control and disturbancecompensation techniques[J].IEEE Transactions on Power Elec⁃tronics,2013,28(3):1358-1365.[12] 刘红俐,张鹏,朱其新,等.基于新型趋近律的积分模糊滑模控制及其在PMSM控制中的应用[J].航天控制,2014,32(6):81-87.[13] 韦成杰,吴昕.基于新型指数趋近律的永磁同步电机滑模变结构控制[J].科技通报,2016,32(8):124-127. [14] ZHANG X G,ZHAO K,SUN L.A PMSM sliding mode controlsystem based on a novel reaching law[C]//2011InternationalConference on Electrical Machines and Systems(ICEMS).Bei⁃jing:IEEE,2011.[15] 王志宇,王长松,齐昕,等.永磁同步电机自适应滑模负载观测器研究[J].电机与控制学报,2012,16(1):45-49. [16] 鲁文其,胡育文,梁骄雁,等.永磁同步电机伺服系统抗扰动自适应控制[J].中国电机工程学报,2011,31(3):75-81. [17] 盖江涛,黄守道,黄庆,等.基于负载观测的永磁电机驱动系统自抗扰控制[J].电工技术学报,2016,31(18):29-36.(下转第63页) 2020年第48卷第4期 D驱动控制rive and control 王家舜 高速无位置传感器无刷直流电动机控制系统63 稳定,能够被有效地检测到过零点,电机切换到自同步控制状态㊂图9为电机达到额定转速后三相相电压的波形,图10为电机稳定运行后三相相电压波形与三相合成电压波形,验证了三相电压合成后再获取反电动势理论的正确性㊁可行性㊂图9 额定转速时三相电压波形图10 平稳运行时三相电压与合成电压测得A 相和B 相相电压与A 相电流比较波形如图11所示,可以看出,在高速运行的情况下电压电流波形比较稳定,没有出现丢步,且有一定的抗干扰能力,经观察电机实际运行也非常稳定,在高转速情况下没有出现抖动的情况㊂图11 相电压与相电流波形5 结 语实验表明,硬件过零点检测电路设计,结合软件多中断嵌套算法,能够对无刷直流电动机在高转速时的过零点进行精确判断,从而计算出精确的电机换相时间,本文在软件和硬件上对过零点检测的设计是可行有效的㊂另外从实验结果看出,软件中加入的抗干扰以及滤波算法,也很大程度地保证了电机的平稳运行㊂参考文献[1] RIEMER B,LESSMANN M,HAMEYER K.Rotor design of ahigh-speed permanent magnet synchronous machine rating 100000r /min at 10kW [C]//2010IEEE Energy Conversion Congressand Exposition (ECCE ).Atlanta,GA:IEEE,2010:3978-3985.[2] KOLONDZOVSKI Z,SALLINEN P,BELAHCEN A,et al.Rotor⁃dynamic analysis of different rotor structures for high-speed perma⁃nent-magnet electrical machines[J].IET Electric Power Applica⁃tions,2010,4(7):516-524.[3] CHEN Y,QUAN L,ZHU X,et al.Electromagnetic performanceanalysis of double-rotor stator permanent magnet motor for hybrid electric vehicle[J].IEEE Transactions on Magnetics,2012,48(11):4204-4207.[4] 王大方,刘智祺,金毅,等.基于反电动势积分法的无位置传感器直流无刷电机试探性起动研究[J].电工技术学报,2012,27(12):178-184.[5] ORTEGA R,PRALY L,ASTOLFI A,et al.Estimation of rotorposition and speed of permanent magnet synchronous motors with guaranteed stability [J].IEEE Transactions on Control SystemsTechnology,2011,19(3):601-614.[6] KIM T H,EHSANI M.Sensorless control of the BLDC motorsfrom near-zero to high speeds[J].IEEE Transactions on Power Electronics,2014,19(6):1635-1645.[7] 吴筱辉,程小化,刘杰.反电势法检测转子位置的无刷直流电机起动方法[J].微电机(伺服技术),2010,38(4):79-81.[8] 吴小婧,周波,宋飞.基于端电压对称的无位置传感器无刷直流电机位置信号相位校正[J].电工技术学报,2009,24(4):54-59.[9] 夏长亮,方红伟.永磁无刷直流电机及其应用[J].电工技术学报,2012,27(3):25-34.[10] EATON D,RAMA J,SINGHAL S.Magnetic bearing applica⁃tions and economics[C]//2010Record of Conference Papers In⁃dustry Applications Society 57th Annual Petroleum and ChemicalIndustry Conference (PCIC).San Antonio,USA:IEEE,2010.[11] 刘庆飞.内置式永磁同步电机转子初始位置检测方法[J].电源学报,2015,15(1):132-137.[12] 薛晓明.一种统一的无刷直流电机直接反电动势法[J].电机工程学报,2010,25(9):62-68.[13] 陈发毅,钱振天,姚文熙,等.改善低直流母线电容电机驱动系统稳定性方法[J].电源学报,2018,16(3):163-167.[14] 李自成,程善美,蔡凯,等.反电动势过零检测无刷直流电机转子位置新方法[J].电工技术学报,2009,24(7):52-58.[15] 张智尧,林明耀,周谷庆.无位置传感器无刷直流电动机无反转起动及其平滑切换[J].电工技术学报,2009,24(11):26-32.作者简介:王家舜(1982 ),男,硕士,工程师,主要研究电机控制领域相关技术㊂(上接第54页)[18] 张国柱,陈杰,李志平.直线电机伺服系统的自适应模糊摩擦补偿[J].电机与控制学报,2009,13(1):154-160.[19] 童克文,张兴,张昱,等.基于新型趋近律的永磁同步电动机滑模变结构控制[J].中国电机工程学报,2008,28(21):102-106.[20] 韩镇锚,胡勤丰.带负载转矩观测器的永磁同步电机位置控制[J].微特电机,2018,46(3):39-42.作者简介:张苏英(1961 ),女,教授,硕士研究生导师,研究领域为复杂系统理论及应用㊂。
基于新型趋近律的全局快速Terminal滑模PMLSM控制索宇超;张博;杨永宝;艾雄雄;邓斌;王杰
【期刊名称】《电机与控制应用》
【年(卷),期】2022(49)11
【摘要】针对滑模控制(SMC)的永磁直线同步电机(PMLSM)位置跟踪中存在收敛速度慢和系统抖振严重两个方面的问题,进一步提高PMLSM控制的跟踪精度,改善系统的动态品质,在传统的幂次趋近律基础上,引入了Fal函数,并结合新型全局快速终端滑动模态,提升系统的趋近速度并对系统抖振进行有效的控制;在SMC系统外可采用干扰观测器来对系统的扰动信号等进行前馈补偿,提高系统的抗干扰处理能力。
利用MATLAB/Simulink软件进行计算机仿真,并与传统幂次趋近律SMC进行对比。
仿真分析表明,该跟踪控制算法能够提高系统的跟踪与控制精度,并且增强了系统的抗扰动性能。
【总页数】7页(P16-21)
【作者】索宇超;张博;杨永宝;艾雄雄;邓斌;王杰
【作者单位】西安工程大学电子信息学院
【正文语种】中文
【中图分类】TM359.4;TP273
【相关文献】
1.基于全局趋近律滑模的感应电机控制方法
2.基于双幂次滑模趋近律方法的PMLSM精密位置控制
3.基于快速双幂次趋近律的新型滑模控制
4.鲁棒全局快速
Terminal滑模末制导律研究5.基于新型趋近律的永磁直线同步电动机全局滑模控制
因版权原因,仅展示原文概要,查看原文内容请购买。