物流系统控制
- 格式:ppt
- 大小:454.50 KB
- 文档页数:32
洛阳理工学院河南省洛阳市摘要基于生产产业对自动化学科日益增长的需求,我们需要设计许多不同的自动化控制系统,在进行系统的调查之后,发现在物流行业在很多的地方仍然在大量使用人工劳动力进行计件工作,因此设计一款可以运用在物流行业进行计件工作的自动控制系统是非常有必要的。
系统的硬件设计包括:PLC的外部接线,管理模块、识别模块、信息处理模块;系统的软件设计包括,I/O表、梯形图、指令表。
关键词:计件包装、PLC、梯形图、自动化前言在现代化的工业生产中,由于生产设备的不断更迭,使得生产效率不断地提高,在生产的同时,需要对各种类的生产资料进行归类计数、包装,如果将这些繁重且重复度非常高的工作交予人工去完成,不仅需要消耗大量人力,而且效率低下,和已经具备一定规模的自动化生产显得格格不入,同时使用人工来进行计数工作不仅劳动强度大,而且作为计数方式效率十分地低下,在大量消耗人力的同时加重了工厂等生产设施的运行与维护成本,无法满足也不适合现代化生产的需要。
当需要对生产资料进行大量计数时使用人工来进行计数的方式已经变得不可取,因此使用一套现代化可以适应大规模生产的计数系统就变得尤为重要,在社会面上也拥有大量的需求,所以设计一套自动化计件系统加入到完整的生产线当中,用自动化的生产线来来代替传统的人工计数的生产线,代替繁重的人工作业是十分有必要的。
第1章总体方案设计1.1 基本组成当被检测物体放置于传送带上时,又电机带动传送带运行,让被检测物体运行至被检测区域内,通过传感器确认检测是否符合预设的检测物体的表征在对传送带上通过检测区域的被检测物体计数在将数据信息输入到信息采集系统中,进行集中统计处理1.2 系统的工作原理1.2.1 计件系统工作原理电路中两个红外发射式光电传感器,红外发光二极管和光敏晶体管成35°夹角封装在一起,焦点在距离传感器5-8mm处;工作时,光电传感器的红外发光二极管发射红外光,检测前方是否有物体。
航空货运物流控制系统的设计与实现随着全球经济的发展和国际贸易的日益繁荣,货运物流业成为支撑国家经济发展的重要力量。
而航空货运物流是其中的重要分支,在国际贸易中发挥着重要作用。
为了更好地掌控航空货运物流,提高物流效率,保障货物的安全和稳定运输,航空货运物流控制系统得以设计和实现。
一、航空货运物流控制系统的主要功能1.货物追踪航空货运物流控制系统主要通过GPS技术和RFID技术实现对货物的追踪,可以随时准确地查看货物的位置和实时运输状态,可以实时监控航班的动态和货物的清关进度,更好地协调和配合物流配送。
2.运输信息管理航空货运物流控制系统实现了对物流信息的全面管理,有利于实时跟踪货物的运输信息,确保货物能够按照规定的时间和地点到达目的地。
同时,该系统还可以根据不同服务需求,为顾客提供不同的物流服务方案。
3.供应链管理航空货运物流控制系统还可以实现整个供应链的一体化管理,从服务需求、运输计划、运输过程中的各个环节都可以得到全方位的监控和管理。
这可有效提高供应链的效率,实现快速、高效、安全、便捷的货物配送服务。
二、航空货运物流控制系统的设计与实现1.系统架构设计航空货运物流控制系统包括前端、后端和存储三个层次,前端主要负责数据采集和物流信息查看,后端主要集成和管理数据,并通过算法进行数据处理,存储层则用于存储所有数据。
2.技术选择航空货运物流控制系统主要依赖于云计算和移动互联网技术,同时兼顾人工智能和物联网技术。
云计算和移动互联网技术保证了系统在全球范围内可用,人工智能技术实现智能化的运输计划和智能化的货物配送,物联网技术完成对货物的实时追踪和数据管理。
3.系统实现系统实现主要包括算法的设计、数据库的构建和API接口的开发。
算法设计主要涉及航班查询、货物定位、订单跟踪等方面;数据库的构建主要是存储各种数据信息;API接口是为前端提供服务,支持在WEB端或APP端访问后端数据,实现用户数据查看和操作的接口开发。
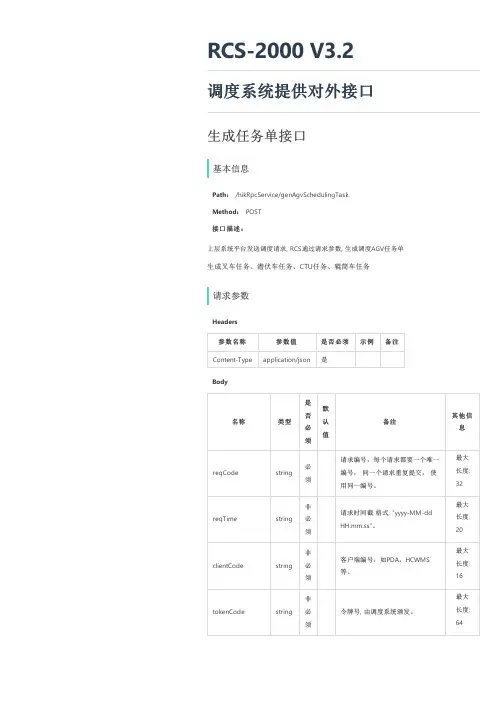
RCS-2000 V3.2调度系统提供对外接口生成任务单接口基本信息Path: /hikRpcService/genAgvSchedulingTaskMethod: POST接口描述:上层系统平台发送调度请求, RCS通过请求参数, 生成调度AGV任务单生成叉车任务、潜伏车任务、CTU任务、辊筒车任务请求参数Headers参数名称参数值是否必须示例备注Content-Type application/json是Body名称类型是否必须默认值备注其他信息reqCode string必须请求编号,每个请求都要一个唯一编号,同一个请求重复提交,使用同一编号。
最大长度:32reqTime string 非必须请求时间截格式: “yyyy-MM-ddHH:mm:ss”。
最大长度:20clientCode string 非必须客户端编号,如PDA,HCWMS等。
最大长度:16tokenCode string 非必须令牌号, 由调度系统颁发。
最大长度:64taskTyp string必须任务类型,与在RCS-2000端配置的主任务类型编号一致。
内置任务类型: 厂内货架搬运: F01 厂内货架空满交换: F02 辊筒搬运接驳:F03 厂内货架出库AGV待命:F04旋转货架: F05 厂内电梯任务: F06以下为叉车专用任务类型高位货架到工作台: F11 工作台到高位货架: F12 巷道到工作台: F13 工作台到巷道: F14 高位货架到工作台(接驳) : F15 工作台到高位货架 (接驳): F16 巷道到工作台(接驳) : F17 工作台到巷道(接驳) : F18 叉车电梯主任务: F20最大长度:16ctnrTyp string 非必须容器类型(叉车/CTU专用)叉车项目必传。
最大长度:16ctnrCode string 非必须容器编号(叉车/CTU专用)最大长度:32ctnrNum string 非必须1容器数量(叉车堆叠专用)最大长度:2taskMode string 非必须任务模式0-普通move1-出库move2-入库move3-移库move出库move模式不能被打断,普通move和入库move可以被打断,出库move执行完必须配合入库move或者移库move执行最大长度:1最小长度:1枚举:0,1,2枚举备注:0-普通move1-出库move2-入库movewbCode string 非必须工作位,一般为机台或工作台位置,与RCS-2000端配置的位置名称一致, 工作位名称为字母\数字\或组合, 不超过32位。
物流系统的五个要素物流系统的五个要素是:物流规划、物流控制、物流质量、物流信息和物流服务。
一、物流规划物流规划是物流系统的核心,它关系到企业的运行效率、成本控制和市场份额的改善。
物流规划决定了物流系统的结构、管理方式、经营模式、资源配置和运营活动,涵盖了货物生产、储存、运输、配送、收货等各个环节。
物流规划还包括物流战略和管理、物流组织、物流网络设计和路径规划等,对企业物流管理起到关键性作用。
二、物流控制物流控制是物流系统的重要组成部分,关系到企业的成本、效率和社会效益。
物流控制的主要任务是确保物流运行的有序和高效,通过合理的控制手段,使企业的物流运营可以按计划进行,并改善物流系统的运行效率和客户满意度。
物流控制主要包括物流监控、物流监督、物流评估、物流改善和物流计划等。
三、物流质量物流质量是指物流系统的效率、准确度、及时性和安全性的总体水平。
物流质量的提高可以大大改善企业的竞争力,提高企业的市场占有率,提升企业的声誉和形象。
物流质量的提高主要依靠物流运营的可持续性,即实施全面的物流管理,以确保物流运输过程中的安全、高效、及时、准确等要求。
四、物流信息物流信息是物流系统运行的基础,是物流管理的重要依据,它集成了物流系统中所有参与者的信息,如客户、供应商、运输商、报关行等,可以有效地收集、整理、处理和分析物流信息,从而提高物流运营效率,降低成本,提升物流服务质量。
五、物流服务物流服务是物流系统的最终目标,也是物流系统运行的关键因素,它包括物流计划规划服务、物流订货服务、物流报关服务、物流运输服务和物流售后服务等。
物流服务需要物流系统的所有参与者共同参与,共同努力,以确保物流运输的高效、可靠、安全和及时,从而提高物流服务的质量和水平,更好地满足客户的需求。


在自动仓储系统复杂多变的应用环境中,WCS必须要保证高可靠性和高效率。
因此,WCS的规划十分重要。
仓储系统的发展离不开[wiki]物流[/wiki]装备和物流软件这两个关键因素。
通常,自动化仓储物流系统软件由两部分组成:[wiki]仓库 [/wiki]管理系统(WMS)、仓库设备控制系统(WCS)。
WMS不仅涉及仓储系统的业务流程、业务规则,还涉及与整个大物流系统的各种信息接口,这些信息接口使仓储子系统和整个物流环境有机地结合在一起。
协调运作。
在自动仓储系统的规划中,首先要解决物流系统的整体流程规划、功能规划等问题,以及为了满足流程或完成功能所需要配置的相应硬件设备的选择问题;其次要解决物流软件的规划问题,包括WMS 和WCS。
自动仓储系统大致可分为三个层次,如图1所示,最上层是WMS,负责仓储业务逻辑的处理;最下层是具体的物流设备,如巷道堆垛机、AGV系统等;WCS位于WMS与物流设备之间的中间层,负责协调、调度底层的各种物流设备,使底层物流设备可以执行仓储系统的业务流程,并且这个过程完全是按照程序预先设定的流程执行的。
调度控制软件的规划在自动仓储系统中是非常重要的部分。
在一个复杂的、高可靠性的系统中,调度控制软件的重要性更加显著。
设备调度控制软件应满足的要求设备控制是指一种用来协调、调度底层物流设备作业的机制。
WCS 系统将负责控制实物的流动。
如托盘的流动。
高度自动化仓储系统中的物流自动化控制系统一般要满足以下要求。
1 应安全、高效地调度、协调底层物流设备运行。
当然,这个要求在实际应用时可能会有些矛盾,如在调度一轨双车时(在同一个水平运行轨道上拥有两个可以交叉作业的穿梭小车,由于两个小车作业区的交叉,所以需要WCS对其进行必要的调度),如果追求安全就会应该让两个小车距离远一些。
但如果追求高效,就要求两个小车只要不出现撞车就可以交叉作业;2 设备控制系统应能够7×24小时全天候稳定运行,故障时间应最小化,并且发生故障时可以很快恢复正常的执行状态;3 高度自动化仓储系统虽然是先进和高效的方式,但资金投入很大,有些投资者可能会选择分阶段投入,这也导致在项目中WCS软件也应该是一个分阶段实施的过程,因此要求WCS应建立在一个可以灵活伸缩的架构之上;4 目前在软件行业中新技术层出不穷,并且WCS位于承上启下的中间层。
物流运输管理控制程序简介本文档旨在介绍一个物流运输管理控制程序,以帮助公司实现高效的物流运输管理和控制。
该程序涵盖了物流运输的各个方面,包括计划、组织、执行和监控。
目标该物流运输管理控制程序的主要目标包括:- 确保物流运输的及时性:通过有效的计划和组织,确保物流运输活动按时进行,以满足客户的需求和要求。
- 提高运输效率:优化运输路线和装载方法,降低运输成本,并提高运输效率。
- 控制运输风险:通过监控运输过程和实施适当的风险管理措施,降低物流运输过程中的风险。
- 优化仓储管理:通过有效的仓储管理,提高物流运输的效率和可靠性。
程序概述1. 计划阶段在计划阶段,我们将对物流运输需求进行分析,并制定相应的运输计划。
这包括以下步骤:- 收集物流运输需求信息:了解客户的运输需求,包括货物种类、数量、运输距离等。
- 分析物流需求:根据收集到的信息,分析物流需求,确定运输方式和运输路线等。
- 制定运输计划:根据分析结果,制定具体的运输计划,包括运输时间、路线、运输工具等。
2. 组织阶段在组织阶段,我们将根据运输计划,组织物流运输活动。
这包括以下步骤:- 货物装载和包装:根据货物特性和运输计划,进行货物的装载和包装。
- 运输资源调配:调配适当的运输工具和人力资源,确保物流运输活动的顺利进行。
- 运输路线优化:根据实际情况和实时数据,对运输路线进行优化,提高运输效率。
3. 执行阶段在执行阶段,我们将按照运输计划,执行物流运输活动。
这包括以下步骤:- 运输操作执行:按照运输计划,进行货物的装卸、运输和交付等操作。
- 实时监控:通过实时监控物流运输活动,对运输过程进行监控和调整,确保运输的顺利进行。
4. 监控阶段在监控阶段,我们将对物流运输活动进行监控和评估。
这包括以下步骤:- 运输数据收集:收集和记录物流运输活动的相关数据,包括运输时间、运输费用等。
- 运输性能评估:对物流运输活动进行评估,分析实际运输结果与计划之间的差异。
基于PLC的物流仓储自动化控制系统设
计-控制方案
概述
本文档描述了基于PLC的物流仓储自动化控制系统的设计方案。
该系统旨在提高物流仓储操作的效率和准确性,通过自动化控
制实现货物的存储、检索和分配。
控制方案
硬件设计
1. 在系统中使用可编程逻辑控制器(PLC)作为控制核心。
PLC具有可靠性高、实时性强的特点,适合于物流仓储自动化控制
系统的设计。
2. 配置传感器和执行器,如光电传感器、扫描枪、电动滚筒等,用于对货物进行检测和操作。
软件设计
1. 开发PLC程序,实现物流仓储自动化控制系统的各项功能。
包括但不限于货物的入库、出库,货架的自动调度和分配等。
2. 设计用户界面,提供人机交互功能,方便操作员监控和控制系统。
3. 配置数据库,用于存储和管理货物的信息,以及记录系统运行数据。
控制流程
1. 系统启动时,进行初始化操作,包括货架的位置校准、传感器状态检测等。
2. 接收入库或出库指令,根据指令控制相应货架的移动和执行器的操作。
3. 通过传感器检测货物的位置和状态,确保操作的准确性和完整性。
4. 更新数据库中货物的位置和数量信息。
5. 根据货物的属性和需求,自动调度和分配货架,实现高效的仓储管理。
总结
该基于PLC的物流仓储自动化控制系统设计方案包括硬件设计和软件设计两部分。
通过PLC作为控制核心,配合传感器和执行器,实现自动化控制。
同时,利用用户界面和数据库,方便操作
员监控和管理系统。
该控制方案能够提高物流仓储操作的效率和准确性,有效降低人工错误,提高仓储管理的智能化水平。
物流系统及其基本功能物流系统是一种基于信息技术的管理系统,用于协调、优化和控制货物运输和物流过程。
它旨在提高物流运作的效率与效益,提供可靠的服务满足客户需求。
下面将详细介绍物流系统的基本功能。
1.订单管理:物流系统可以实时记录和处理客户订单。
它可以自动化处理从订单生成到配送的整个过程。
同时,系统还能够跟踪和控制订单的状态,提供实时的订单信息和查询服务。
2.库存管理:物流系统通过集成仓库管理功能,实现对库存的高效管理和控制。
它能够自动记录物料入库和出库的数量和时间,并实时更新库存余量。
同时,系统还能够提供库存报告,帮助企业预测和规划库存需求。
3.运输管理:物流系统可以帮助企业优化运输计划和路线,提高运输效率和减少物流成本。
它可以根据货物的重量、尺寸和目的地等因素,自动选择最佳运输方式和物流合作伙伴。
同时,系统还能够实时跟踪货物的运输进程,提供货物位置和状态的实时更新。
4.车辆调度:物流系统能够根据货物的量和运输要求,自动安排和调度适合的车辆进行运输。
它可以考虑车辆的可用性、地理位置和装载能力等因素,进行合理的车辆配备和调度,提高车辆利用率和运输效率。
5.路线规划:物流系统可以根据货物的目的地和运输需求,自动规划最佳的运输路线。
它可以考虑交通状况、道路条件、油价等因素,优化路线并提供导航服务。
同时,系统还能够实时更新路况信息,提供最新的交通信息和路线建议,减少运输时间和成本。
6.跟踪和追踪:物流系统能够实时监控货物的运输过程,提供货物位置和状态的实时跟踪和追踪。
它可以通过集成传感器和无线通信设备,实时获取货物的位置、温度、湿度等信息,并将信息反馈给用户。
同时,系统还能够提供货物的追溯功能,帮助企业进行质量控制和客户服务。
7.成本管理:物流系统能够收集和分析物流过程中的各项费用信息,帮助企业进行成本控制和分析。
它可以自动计算和比较不同运输方式和合作伙伴的成本,提供成本分析和预测报告。
同时,系统还能够帮助企业优化运输计划,降低物流成本。
物流系统的预测与控制 LG GROUP system office room 【LGA16H-LGYY-LGUA8Q8-LGA162】物流系统预测与控制7.1物流系统预测概述预测就是要对复杂变化的事物进行大量调查研究.应用系统分析的方法,从中找出使事物发生变化的固有规律,去揭示事物未来的状况和面貌。
在规划设计一个物流系统之前,需要对其物资的流向、流量、资金周转及供求情况进行调查研究,取得各种资料和信息,应用科学的方法进行预计和推测,才能使规划设计的物流系统符合实际,运行正常,获得效益。
一个运行中的物流系统、一个第三方物流企业都需要进行市场预测,因为预测是编制计划的基础,一个物流系统的计划运输量、计划存储量、计划搬运量等都需要在预测的基础上制定计划,可见预测的准确与否直接影响到计划的可行性,决定企业的生存和发展。
由于一个物流系统是一个多环节的系统,它和资源、销售、交通的变化,和人、财、物的流通,国家的有关方针政策,国际国内经济发展形势,甚至和气候状况等自然条件的变化都有关,这些内容都应该是预测所考虑的。
比如一个空调生产厂家在制定第二年的生产计划时预测了第二年我国北方会有一段连暗高温气候,会出现一段时间的空调采购热,并在生产计划中给予了考虑,且还应有一个调运及时,运作迅速可靠的物流系统的支持,故在1981年、1998年,北京、石家庄、东北出现40℃的持续高温时,能迅速调运空调就不会出现“空调”脱销和供不应求的现象,厂家也会从中获得巨大的效益。
据资料介绍,美国市场需求预测的偏差目前已可控制在10%左右。
随着科技的进步,预测方法的研究和改进,预测准确度的提高,物流系统预测将会获得更好效果。
一、物流系统预测的基本原则和预测程序物流系统预测是指根据物流系统的过去和现在的发展规律,借助科学的方法和手段,对物流管理发展趋势和现状进行描述、分析、形成科学的假设和判断的一种科学理论。
预测的基本原则:1、惯性原则:所谓惯性是指由于事物发展变化主要受内因的作用,因而一个事物的过去,现在的状态会持续到将来。
创新管理科技创新导报 Science and Technology Innovation Herald160DOI:10.16660/ki.1674-098X.2019.25.160智能物流车控制系统设计陈越超 程志伟(长春师范大学工程学院 吉林长春 130032)摘 要:为解决物流在上下货过程中消耗的大量劳动力和时间。
本文结合传感器技术和单片机技术,设计了智能物流小车,小车由主控模块、电源模块、机械手控制模块、直流电机驱动模块、寻迹模块、条形码识别模块、蓝牙模块、语音播报模块等组成,使小车能按照预定轨迹行驶,能正确识别路径和避障,能够智能识别和搬运货物。
工作人员可以通过手机实现任务下发和工作状态监控。
关键词:自动化 条形码识别 物流车 语音播报中图分类号:U495 文献标识码:A 文章编号:1674-098X(2019)09(a)-0160-02目前,随着“一带一路”、“互联网+”、“中国制造2025”等重大战略的实施,整个工业的物料搬运工作都在向自动化、智能化发展,在生产制造过程中,智能物流车起到物料流动的作用,通过上货、搬运和卸货将工业生产的各环节串联在一起。
因为智能物流车本身具有较高的自动化、智能化、安全性和灵活性,成就了工业生产的自动化和智能化。
物流车的引入可以减低工人劳动强度,提高生产效率,降低企业的生产成本。
1 智能物流小车控制系统设计方案本设计以三轮小车为载体,前轮为一个万向轮,后轮为两个驱动轮,安装12V直流减速电机,控制系统以Arduino Mega2560为主控板,系统利用手机下发搬运货物编号,控制器通过蓝牙串口模块接收命令,小车通过两个寻迹模块自动沿黑色轨迹线选择正确的行进路径,并通过第三个寻迹模块判断小车位置,到达上货区后,通过条形码识别模块扫描货物上条形码,选择正确货物,利用机械手进行抓取。
之后通过减速带等障碍,到达卸货区。
全程通过语音模块进行语音播报位置信息及工作状态,OLED 同步显示物品信息和语音播报的内容。
用PLC实现对物流系统辊道部分的控制1 引言物流控制系统集现代物流技术、仓储技术、自动化技术于一体,是cims中的重要环节,在国外已经得到较广泛的应用,该技术也正在逐渐地应用于我国许多行业中。
在美国、德国和日本,逐渐成为机械制造业中最大的分枝之一。
整个系统的主要设备有:全自动堆垛机、四自由度机械手、立体仓库、辊道输送机。
2 硬件组成本系统共采用3台辊道输送机,其传动采用交流变频调速系统(分别由西门子420系列交流变频器控制)。
每条辊道的前后皆装有光电传感器,其作用是确认控制对象(以小实心物块代替)的所在位置。
当有物体通过时,传感器所连接的继电器瞬间收到脉冲信号,从而确认其位置。
皮带设计为既可正转也可逆转,速度也分为高速及低速两档,在辊道中间我们还接入了各种传感器作为自动识别信息元件,如条码读入器、铁/非铁识别传感器、颜色识别传感器等。
在物体传送过程中,物体的质地直接在铁/非铁识别传感器上显示,颜色识别也是直接显示,而读入的条码将输入至计算机或plc中,作为物体区别于其他物体的代码存入物流信息系统。
在此设计中,采用vb 编写一段程序以实现条码信息与pc相连接。
其中变频器是整个辊道控制中最重要的环节。
2.1 变频器的控制方式及参数设定变频器micromaster420是用于控制三相交流电动机速度的变频器,具有很高的运行可靠性和功能的多样性,其脉冲宽度调制的开关频率是可选的,因而降低了电动机运行的噪声,全面而完善的保护功能为变频器和电动机提供了良好的保护护特性。
性能特性:磁通电流控制fcc改善了动态响应和电动机的控制特性快速电流限制fcl功能实现正常状态下的无跳闸运行内置的直流注入制动复合制动功能改善了制动特性 l 多点v/f 特性加速/减速斜坡特性具有可编程的平滑功能具有比例积分pi控制功能的闭环控制其安装图如图1所示。
(1)用基本操作板bop进行调试利用基本操作面板bop(如图2所示)可以改变变频器的各个参数,bop具有7段显示的五位数字,可以显示参数的序号和数值报警和故障信息以及设定值和实际值参数的信息,不能用bop存储。
智慧物流机械臂控制系统设计方案智慧物流机械臂控制系统是一种智能化的装置,用于实现物流自动化和智能化的操作。
通过这个系统,可以实现物流领域中的各种动作和任务,从而提高工作效率和减少人力成本。
以下是一个智慧物流机械臂控制系统的设计方案。
一、功能需求:1. 抓取和放置物品:系统需要具备抓取和放置物品的功能,可以根据输入的指令和传感器的反馈来完成这些动作。
2. 实时定位和路径规划:系统需要能够实时定位机械臂的位置和物品的位置,并能够进行路径规划,以实现高效的任务执行。
3. 自动化控制:系统需要具备自动化控制的能力,能够根据任务的要求和输入的指令自动执行相应的动作。
4. 用户界面:系统需要提供一个用户界面,方便用户对系统进行操作和监控。
二、硬件设计:1. 控制板:选用高性能的控制板作为系统的核心,可以实现各种算法和控制逻辑。
2. 传感器:选择适当的传感器,用于检测机械臂和物品的位置、姿态和状态等信息。
3.执行器:选用高精度和高可靠性的执行器,用于控制机械臂的运动和动作。
4.电源供应系统:为系统提供稳定和可靠的电源供应,以确保系统的正常运行。
三、软件设计:1. 控制算法:设计适当的控制算法,根据传感器的反馈和任务要求,控制机械臂的运动和动作。
2. 定位和路径规划算法:设计定位和路径规划算法,实时定位机械臂和物品的位置,并规划机械臂的运动轨迹。
3. 通信协议:设计适当的通信协议,实现系统和用户界面之间的通信和数据交换。
4. 用户界面:设计直观、易用的用户界面,方便用户对系统进行监控和操作。
四、系统测试和验证:1. 单元测试:对系统的各个模块进行单元测试,确保各个功能正常工作。
2. 集成测试:对整个系统进行集成测试,验证系统的各个模块之间的协作和交互。
3. 性能测试:测试系统的性能指标,如任务执行时间、定位精度、路径规划速度等。
4. 环境适应性测试:测试系统在不同环境条件下的适应能力,如温度、湿度、光照等。
五、总结和改进:在系统的实际应用过程中,需要根据用户的反馈和实际需求对系统进行改进和优化。
基于PLC的物流自动化控制系统设计摘要:本文设计了一种基于可编程逻辑控制器(PLC)的物流自动化控制系统,用于提高物流运输的效率和准确性。
该系统由传感器模块、执行器模块和PLC控制模块组成,可自动化地完成货物的搬运、分拣、存储和出库等工作。
同时,该系统还具有实时监测和报警功能,能够及时响应异常情况,保障物流过程的安全性和稳定性。
实验结果表明,该系统在提高物流自动化水平和工作效率方面具有很高的应用价值。
关键词:可编程逻辑控制器,物流自动化,传感器,执行器,监测,报警Abstract:In this paper, a logistics automation control system based on programmable logic controller (PLC) is designed to improve the efficiency and accuracy of logistics transportation. The system consists of sensor module, actuator module and PLC control module, which can automatically complete the work of cargo handling, sorting, storage and outbound. At the same time, the system also has real-time monitoring and alarm function, which can respond to abnormal situations in a timely manner, and ensure the safety and stability of the logistics process. The experimental results show that the system has high application value in improving the level of logistics automation and work efficiency.Keywords: programmable logic controller, logistics automation, sensor, actuator, monitoring, alarm引言随着物流行业的发展,物流自动化技术得到了广泛的应用。