自然控制系统时域分析与总结
- 格式:ppt
- 大小:1.02 MB
- 文档页数:56
实验5-控制系统时域分析实验目的:1. 掌握控制系统的时域分析方法;2. 熟悉控制系统的基本概念;3. 比较不同控制系统的性能指标,并对其优化。
实验原理:控制系统是由控制器、被控对象和传感器等组成的系统。
它的主要功能是将被控对象的输出值与预期输出值(设定值)进行比较,并根据比较结果对控制器的输出信号进行调整,以实现预期的控制系统动态响应。
系统的状态可以用输入输出关系来表示,通常用系统函数表示,它是输入信号与输出信号的转换函数。
根据系统函数的性质,系统的特性可以分析出来,比如稳态误差、响应时间和阻尼等。
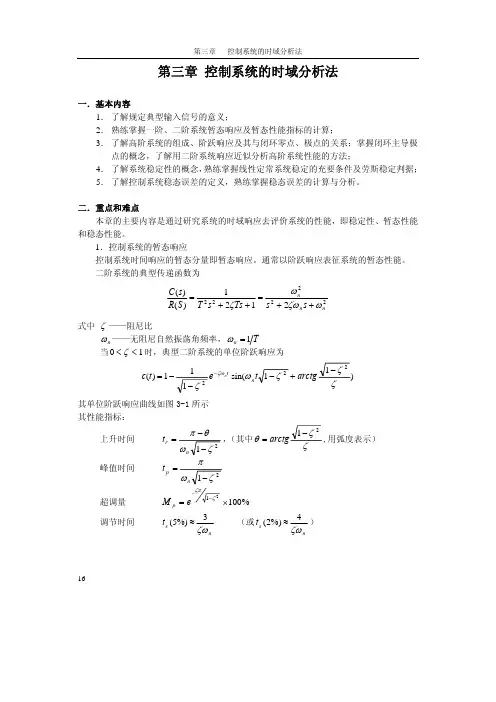
控制系统的时域分析方法主要包括以下内容:1. 稳态误差分析稳态误差是指当控制系统到达稳定状态时,被控对象的输出值与设定值之间的差值。
它是一个反映控制系统偏离设定状态能力的指标。
稳态误差对于不同类型的系统有不同的计算方法,常见的系统类型包括比例控制系统、积分控制系统和派生控制系统。
比例控制系统的稳态误差是:$e_{ss}= \frac {k_p}{1+k_p}, (k_p \neq 0)$派生控制系统的稳态误差是0。
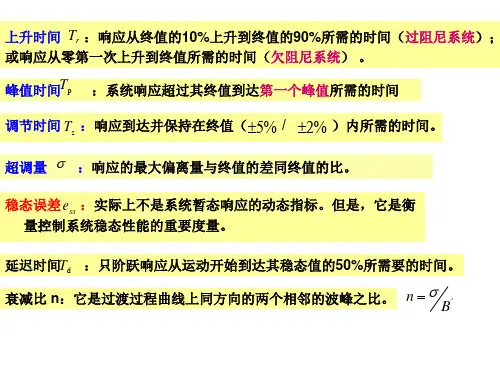
2. 基本响应特性分析一个控制系统的基本响应特性主要包括死区、超调量和稳定时间等。
死区是指当控制器输出的信号在一定范围内时,被控对象的输过不会发生变化。
死区对控制系统的响应时间和稳态误差有很大影响,通常需要根据系统的特点对死区进行调整。
超调量是指被控对象的输出值在达到设定值后,超出设定值的程度。
常见的超调量有百分比超调量和绝对超调量。
3. 阻尼及其影响阻尼是指系统的阻尼比,它是表征系统阻尼程度的一个参数。
阻尼对控制系统的稳定性和性能有很大影响。
当阻尼比为1时,系统的响应最快,但容易出现震荡现象。
阻尼比小于1时,系统的响应相对较慢,但是不会出现震荡现象。
当阻尼比大于1时,系统的响应速度较慢,但相对稳定。
实验步骤:本实验采用MATLAB软件对几种常见的控制系统进行时域分析,具体步骤如下:1. 打开MATLAB软件,新建文件进行编程。

控制系统的时域响应分析
控制系统是指将环境及机器内部参数调节到所需状态的系统,它通过检测及控制参数的变化来实现控制的目的,稳定状态,使之不受外界参数的干扰。
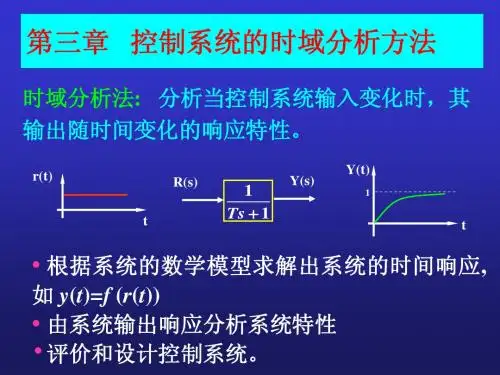
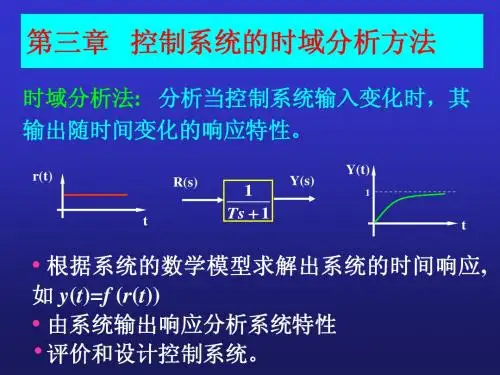
控制系统的时域响应分析,是指控制系统对系统参数和环境影响做出的时间分布响应。
时域响应分析可以根据控制系统的结构特征和实现方式来进行,具体可以分为三类:一是闭环响应分析,在这种情况下,系统中的输出经过一定的误差修正后,又会作为输入反馈回系统,实现系统本身的稳定性。
二是开环响应分析,在这种情况下,系统的输出受到输入的影响,但没有反馈回系统,因此,系统不能自行稳定,而只能在输入变化的情况下,通过外部调节来实现。
第三是多参数响应分析,在这种情况下,控制系统不仅考虑输入和输出,还考虑参数的变化,对待调参数进行调节。
一般来说,控制系统的时域响应分析可以包括系统的调节时间、调节准确度、均衡时间等。
调节时间,指的是控制系统输出参数达到稳定态所需要的时间,它可以反映出控制系统的稳定性。