第三部分 现代控制理论习题详解 第一章 控制系统的状态空间描述
第一章 控制系统的状态空间描述
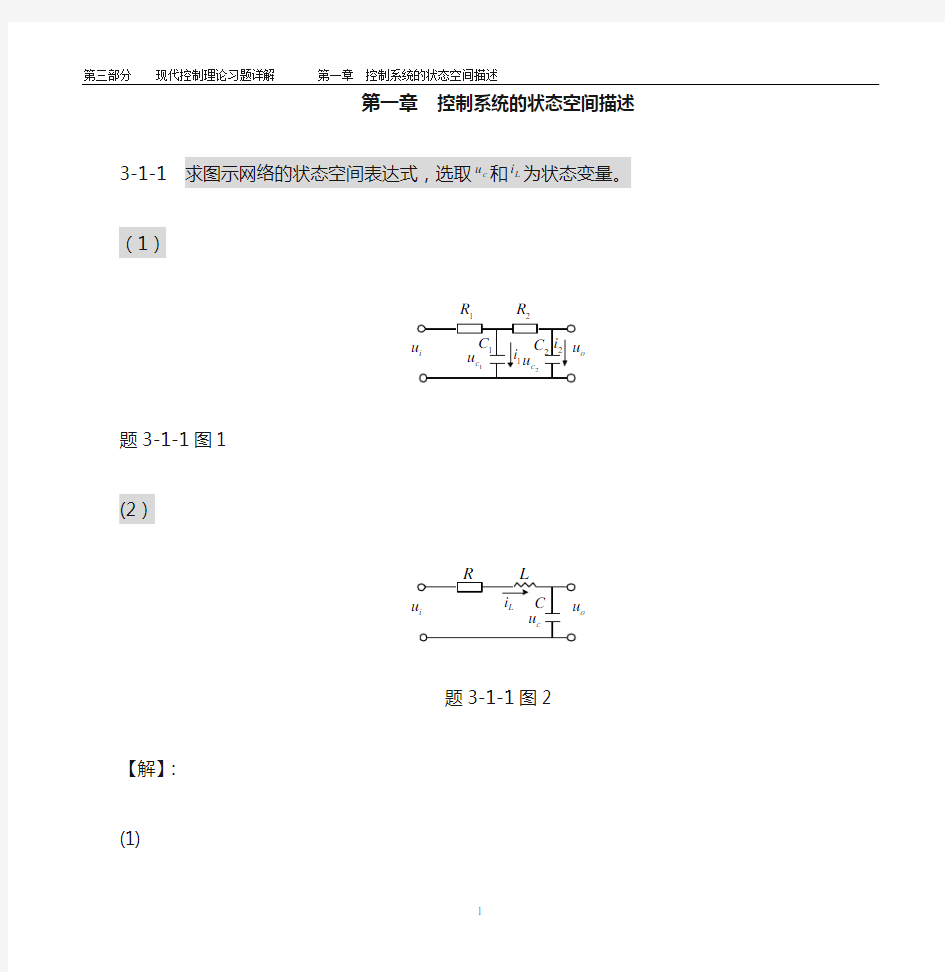
3-1-1 求图示网络的状态空间表达式,选取c u 和L i 为状态变量。 (1)
1
R 2
R
o
题3-1-1图1
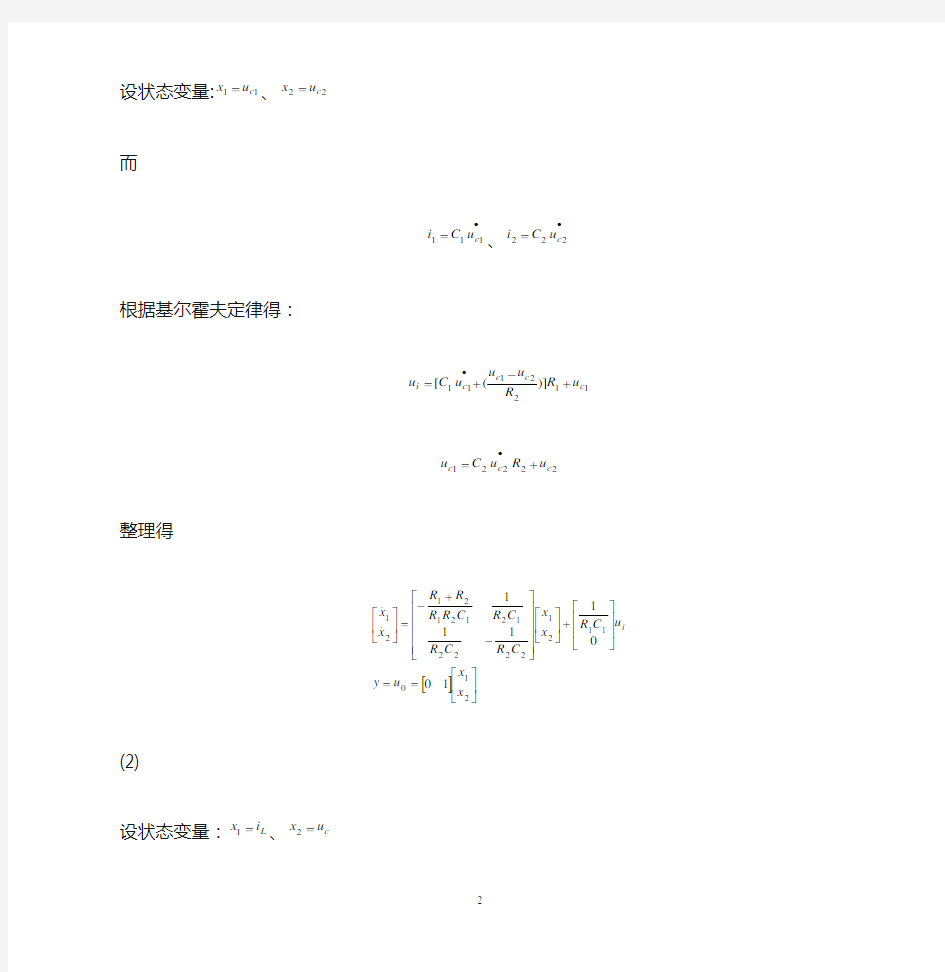
(2)
o
题3-1-1图2
【解】: (1)
设状态变量:11c u x =、22c u x =
而
?
=111c u C i 、?
=222c u C i
根据基尔霍夫定律得:
112
2
111)](
[c c c c i u R R u u u C u +-+=?
22221c c c u R u C u +=?
整理得
[]?
?
?
???==????????+?????????????????
?-+-=??????21011212222121212
1211001111x x u y u C R x x C R C R C R C R R R R x x i
(2)
设状态变量:L i x =1、c u x =2 而
?
=c L u C i
根据基尔霍夫定律得:
c L L i u i L i R u ++?=?
整理得
[]?
?
?
???==????
????+???????????
?
????-
-=??????21021211001011x x u y u L x x C
L L R x x i
3-1-2 如图所示电枢电压控制的它励直流电动机,输入为电枢电压a u 输出为电动机角速度ω,电动机轴上阻尼系数为f ,转动惯量J ,试列写状态方程和输出方程。
L
题3-1-2图
【解】:
设状态变量为:
??
????=??????ωa i x x 21 其中a i 为流过电感上的电流,ω电动机轴上的角速度。 电动机电枢回路的电压方程为:
b a a a a a e i R i L u +?+=?
b e 为电动机反电势。
电动机力矩平衡方程为
L D M f J M ++=?
ωω
由电磁力矩和反电势的关系,有
ωe b c e =,a M D i c M =
式中e c 为电动机反电势系数,M c 为电动机的转矩系数。
J 为电动机轴上粘性摩擦系数,f 电动机轴上等效转动惯量。 整理得
第三部分 现代控制理论习题详解 第一章 控制系统的状态空间描述
[]?
?
?
???==????
??????
?
?
??????-+??????????????????--
-=?
?????212121101001x x y M u J L x x J f J
c L c L R x x L a a M
a e
a a
ω (注:解是非唯一的)
3-1-3 试求图示系统的模拟结构图,并建立状态空间表达式。 (1)
)
题3-1-3图1
(2)
题3-1-3图2
【解】: (1)
如题3-1-3图3设状态变量
)
题3-1-3图3 24
1411
1x T x T x
+-= )(3432x x K x
-= 23x x = 62
25224241
x T K x T K x T x
+--= 55
25551
x T x T K x -= )(1
11
1616x u T K x T x
-+-= 1x y =
写成矩阵的形式得:
[]x
y u T K x T T
K T T K T K T K T K K T T x
0000010000
010
000010001
0000000100000000011
11
11
1
555
222223344
=??
?
????
??
????????????
?+????????????
?
?????
??
????????-------=
(2)
如图题3-1-3图4设状态变量
第三部分 现代控制理论习题详解 第一章 控制系统的状态空间描述
2
y
题3-1-3图4 21x x
= )(4122x u c ax x
-+-= 433fx ex x
+-= 23244du dgx dx bx x
+-+-= 11x y = 32x y = 1x y =
写成矩阵的形式得:
x y u d c x b dg d f e c a x
??
????=????????????+????????????-----=01000001000000000000010 (注:此题解并非唯一的)
3-1-4 已知系统的微分方程,试将其转变成状态空间表达式。
(1) u y y y y 2642=+++ (2) u u y y y 237+=++ (3) u u u y y y
y 23745++=+++ (4) u u y y y +-=++
323)4( 【解】:
在零初始条件下,方程两边拉氏变换,得到传递函数,再根据传递函数求状态空间表达式。
此题多解,一般写成能控标准型、能观标准型或对角标准型,以下解法供参考。 (1)传递函数为:
6422
)(23
+++=s s s s G
状态空间表达式为:
[]x y u x x 00
210024610001
0=?????
?????+??????????---= (2)传递函数为:
3
0723
72)(2
3
2
3
++++=
+++=
s s s s s s s s G
状态空间表达式为:
[]x
y u x x 01
210070310001
=?????
?????+??????????--=
(3)传递函数为:
7
452
3)(2
3
2+++++=s s s s s s G 状态空间表达式为:
[]x y u x x 13
210054710001
0=?????
?????+??????????---= (4)传递函数为:
20301
32313)(2
3424+++++-=+++-=
s s s s s s s s s G 状态空间表达式为:
[]x
y u x x 003110000302100001000010-=????????????+????????????--=
第三部分 现代控制理论习题详解 第一章 控制系统的状态空间描述
【解】:
此题多解,一般可以写成能控标准型、能观标准型或对角标准型,以下解法供参考。 (1)
[]x
y u x x 1111006116100010=?????
?????+??????????---=
结构图如图题3-1-5图1所示
题3-1-5图1
(2)6
55
216552656513)(2
2
222+++-=++--++=++++=s s s s s s s s s s s s s G u
y u x x +--=???
???+??????--=]25[105610 结构图如图题3-1-5图2(a )所示
题3-1-5图2(a)
或有
31
2116
513)(22+-
+-=++++=s s s s s s s G []u
x y u x x +--=???
???+??????--=111
13002 结构图如图题3-1-5图2(b )所示
y
题3-1-5图2(b)
(3)
)
3()1(4)(2++=
s s s s G
)
1(1)1(2)3(3134)(2+-++-++-
+
=s s s s s G
第三部分 现代控制理论习题详解 第一章 控制系统的状态空间描述
x
y u x x
??
?
???---=????
?
?
??????+????????????---=12313410111000110000300000 结构图如图题3-1-5图3所示
题3-1-5图3
(4)
1
333
2)(2
3
2+++++=s s s s s s G []x
y u x x 123100331100010=??????????+??????????---= 结构图如图题3-1-5图4所示
y
题3-1-5图4
3-1-6 将下列状态方程化成对角标准型。
(1)u x x
??
????+??????--=106510 (2)u x x ?????
?????+??????????---=1537126712203010
(3)u x x ??
??
??????+??????????---=0116116100010
【解】:
(1)
特征方程为:
0)5)(1(56)(2=++=++=λλλλλD 。
特征值为:
5,121-=-=λλ
系统矩阵A 为友矩阵,且特征值互异,因此可以化为对角标准型,其变换矩阵P 为范德蒙矩阵。
变换阵:
???
???---=??????--=??????=-111525.0,511111121
P P λλ 线性变换后的状态方程为:
u x u b P x AP P x ?
?
????-+??????--=+=--25.025.05001)()(11 (2)
特征方程为:
第三部分 现代控制理论习题详解 第一章 控制系统的状态空间描述
0)3)(2)(1(61166
7
12
23
123=+++=+++=+---=-λλλλλλλλ
λ
λA I
特征值为:
3,2,1321-=-=-=λλλ。
设变换阵:P=????
?
?????3332
31
232221
131211
P P P P P P P P P 由0)(=-i i P A I λ得
当11-=λ时,05712213011312111=????????????????????-----P P P 取??????????--=??????????=1113121111P P P P
当22-=λ时,04712223012322212=????????????????????-----P P P 取??????????-=??????????=1423222122P P P P 当33-=λ时,03712233013332313=????????????????????-----P P P 取???
?
?
?????-=??????????=3313323133P P P P
变换阵:
??????????----=311341121P ,????
?
?????---=-15.15.212315.25.41
P
线性变换后的状态方程为:
u x x ????
??????--+??????????---=165.132015275.183******** (3)
特征方程为:
0)3)(2)(1(6116)(23=+++=+++=λλλλλλλD 。
特征值为:
3,2,1321-=-=-=λλλ。
系统矩阵A 为友矩阵,且特征值互异,因此可以化为对角标准型,其变换矩阵P 为:
????
?
?????---=??????????=94132111111
1
2322
21
32
1
λλλλλλP ????
?
?????---=-5.05.111435.05.231
P
线性变换后的状态空间表达式为:
u x x ????
??????-+??????????---=5.275.5300020001
3-1-7 将下列状态方程化成约旦标准型。
(1)u x x
??
?
???+??????--=102112 (2)u x x ?????
?????+??????????--=371523*********
(3)u x x ????
??????+??????????-=100452100010 【解】:
(1)
特征方程为:
0)3)(1(342
1
1
2
2=++=++=+--+=
-λλλλλλλA I
特征值为:
3,121-=-=λλ。
设变换阵:??
?
?
??=2221
1211P P P P P 由0)(=-i i P A I λ得:
第三部分 现代控制理论习题详解 第一章 控制系统的状态空间描述
当11-=λ时,011112111=???????
???
??--P P 取???
???=111P 当32-=λ时,011112212=??????????
??----P P 取??
?
???-=112P ????
??-=1111P ,??
????-=-5.05.05.05.01
P
线性变换后的状态空间表达式为:
u x u b P x AP P x ?
?
????-+??????--=+=--5.05.03001)()(11 (2)
特征方程为:
0)3)(1(3
1
1
212
1
42=--=------=-λλλλ
λλA I
特征值为:1,3321===λλλ。 设变换阵:
????
?
?????=3332
31
232221
131211P P P P P P P P P P 当31
=λ时,由0)(11=-P A I λ得:0011231211312111=????????????????????-----P P P ,取????
??????=1111P
当32=λ时,由122)(P P A I -=-λ得:??????????---=????????????????????-----111011231211322212P P P ,取??????????=0012P 当13=λ时,由0)(33=-P A I λ得:0211211213332313=????????????????????------P P P ,取???
?
?
?????=1203P
变换阵:
????
??????=101201011P ,?????
?????---=-1102112101
P
线性变换后的状态空间表达式为:
u x x ????
?
?????---+??????????=432518100030013 (3)
特征方程为:
0)2()1(254)(223=--=-+-=λλλλλλD 。
特征值为:
2,1321===λλλ。
系统矩阵A 为友矩阵,且特征值有重根,因此可以化为约当标准型,其变换矩阵P 为:
[]??
????==311
132
1
P d dP P P P P P λ
??????????=??????????=11112111λλP ,??????????=??????????=21021012λP ,????
?
?????=??????????=42112333λλP 变换阵:
??????????=421211101P ,????
??????----=-121132120
1
P
线性变换后的状态空间表达式为:
u x x ????
?
?????--+??????????=111200010011
3-1-8 已知状态空间表达式,u x x ????
??????---+??????????---=324111410030012
第三部分 现代控制理论习题详解 第一章 控制系统的状态空间描述
(1)试用x P x 1~-=进行线性变换,
变换矩阵????
?
?????=-1000200011P 求变换后的状态空间表达式。
(2)试证明变换前后系统的特征值的不变性和传递函数矩阵的不变性。
【解】: (1)
x P x x P x ~~1=?
=-
??
??
??????---==-45.0003005.02~1AP P A ?????
?????---==-328211~
1B P B
u x x ??
??
?
?????---+??????????---=328211~45.0003005.02~ (2)证明:
变换后的系统矩阵为AP P A 1~-=,输入矩阵为B P B 1~
-= 特征值的不变性:
A sI P A sI P AP P P sP AP P sI -=-=-=-----1111
传递函数矩阵的不变性:
B
A sI C
B PP A sI CPP B P P A sI P CP B P AP P P sP CP B P AP P sI CP s G 1
1
1
1
1
1
1
1111111)()(])([)()()(---------------=-=-=-=-=
验证:
变换前的特征方程为:
0)4)(3)(2()(1=+++=λλλλD
变换后的特征方程为:
0)4)(3)(2()(2=+++=λλλλD
)()(21λλD D =
所以变换前后系统的特征值是不变的。 3-1-9 已知两个子系统的传递函数矩阵分别为
矩阵。 【解】:
(1) 串联
)(1s G 在前,)(2s G 在后时
??
??
?
?????
??++++++++++=?
????????
?++????????
??+++==)2)(1(1)
1(1)3)(2)(1(6
62)3)(1(110211
101
1113
1)()()(2212s s s s s s s s s s s s s s s s s s G s G s G
)(2s G 在前,)(1s G 在后时
??
??
??????
?
?
++++++=??????????+++????????
?
?++==0)1(1)1(1
)
3)(2)(1(5201
1113110211
1
)()()(221s s s s s s s s s s s s s s G s G s G (2) 并联
??
??
?
?
????
??+++++++=??????????++++????????
?
?++=+=s s s s s s s s s s s s s s s G s G s G 1)
1(1)2)(1(32)
3)(1(4
201
1113110211
1
)()()(21
3-1-10 已知离散系统的差分方程为)(2)1()()1(5)2(3)3(k u k u k y k y k y k y ++=++++++ ,求系统的状态空间表达式,并画出系统结构图。 【解】:
根据差分方程,在零初始条件下,方程两边Z 变换,得到系统的脉冲传递函数为
1
532
)(23
++++=z z z z z G [])
(012)()(100)(351100010)1(k x k y k u k x k x =????
??????+??????????---=+ 其结构图如图题3-1-10图所示:
第三部分 现代控制理论习题详解 第一章 控制系统的状态空间描述
y
题3-1-10图
3-1-11 已知离散系统的状态空间表达式为)(10)()(3110)1()1(21
21k u k x k x k x k x ???
???+???????????
?=??????++,[]??
?
???=)()(11)(21k x k x k y ,求系统的脉冲传递函数。
【解】:
H G zI C z W 1)()(--= []??
?????
?
????---=-10
311111
z z
[]
????????????---=10113131
112z z z z 1
31
2
--+=z z z 也可以直接写出。
【解】:
此题多解,一般可以写成能控标准型、能观标准型或对角标准型,以下解法供参考。 (1)
[])(
2
1
2
)
(
)
(
1
)
(
6
11 61
0 00
1 0
)1
(
k
x k
y
k
u k
x
k x
=
?
?
?
?
?
?
?
?
?
?
+
?
?
?
?
?
?
?
?
?
?
-
-
-
=
+(2)
[])(
1
)
(
)
(
1
)
(
4
5
2
1 0
0 1
)1
(
k
x k
y
k
u k
x
k x
=
?
?
?
?
?
?
?
?
?
?
+
?
?
?
?
?
?
?
?
?
?
-
-
-
=
+
《现代控制理论》第1章习题解答 1.1 线性定常系统和线性时变系统的区别何在? 答:线性系统的状态空间模型为: x Ax Bu y Cx Du =+=+ 线性定常系统和线性时变系统的区别在于:对于线性定常系统,上述状态空间模型中的系数矩阵A ,B ,C 和D 中的各分量均为常数,而对线性时变系统,其系数矩阵A ,B ,C 和 D 中有时变的元素。线性定常系统在物理上代表结构和参数都不随时间变化的一类系统, 而线性时变系统的参数则随时间的变化而变化。 1.2 现代控制理论中的状态空间模型与经典控制理论中的传递函数有什么区别? 答: 传递函数模型与状态空间模型的主要区别如下: 1.3 线性系统的状态空间模型有哪几种标准形式?它们分别具有什么特点? 答: 线性系统的状态空间模型标准形式有能控标准型、能观标准型和对角线标准型。对于n 阶传递函数 121210 1110 ()n n n n n n n b s b s b s b G s d s a s a s a ------++++=+++++, 分别有 ⑴ 能控标准型: []012 101 210100000100000101n n n x x u a a a a y b b b b x du ---????? ???????????? ???=+?? ???????? ? ?????----???? ? =+??
⑵ 能观标准型: []0011221100010 00 100010 1n n n b a b a x a x u b a b y x du ---?-?? ????? ??-????? ?????=-+???? ? ????? ??????-???? ?=+?? ⑶ 对角线标准型: []1212 001001001n n p p x x u p y c c c x du ????? ??????? ???=+?????? ????? ??????=+? 式中的12,, ,n p p p 和12,,,n c c c 可由下式给出, 12121012 1 11012 ()n n n n n n n n n b s b s b s b c c c G s d d s a s a s a s p s p s p ------++++=+=+++ +++++--- 能控标准型的特点:状态矩阵的最后一行由传递函数的分母多项式系数确定,其余部分具有特定结构,输出矩阵依赖于分子多项式系数,输入矩阵中的元素除了最后一个元素是1外,其余全为0。 能观标准型的特点:能控标准型的对偶形式。 对角线标准型的特点:状态矩阵是对角型矩阵。 1.4 对于同一个系统,状态变量的选择是否惟一? 答:对于同一个系统,状态变量的选择不是惟一的,状态变量的不同选择导致不同的状态空间模型。 1.5 单输入单输出系统的传递函数在什么情况下,其状态空间实现中的直接转移项D 不等 于零,其参数如何确定? 答: 当传递函数)(s G 的分母与分子的阶次相同时,其状态空间实现中的直接转移项D 不等于零。 转移项D 的确定:化简下述分母与分子阶次相同的传递函数 1110 111)(a s a s a s b s b s b s b s G n n n n n n n ++++++++=---- 可得: d a s a s a s c s c s c s G n n n n n ++++++++=----0 11 10 111)( 由此得到的d 就是状态空间实现中的直接转移项D 。 1.6 在例1. 2.2处理一般传递函数的状态空间实现过程中,采用了如图1.12的串联分解,试 问:若将图1.12中的两个环节前后调换,则对结果有何影响?
1-1 说明题1-1图(a )、(b )中: (1)u 、i 的参考方向是否关联? (2)ui 乘积表示什么功率? (3)如果在图(a )中0u >、0i <,图(b )中0u >,0i >,元件实际发出还是 吸收功率? 解(1)图(a )中电压电流的参考方向是关联的,图(b )中电压电流的参考方向是 非关联的。 (2)图(a )中由于电压电流的参考方向是关联的,所以ui 乘积表示元件吸收的 功率。图(b )中电压电流的参考方向是非关联的,所以ui 乘积表示元件发出的功率。 (3)图(a )中0u >、0i <,所以0ui <。而图(a )中电压电流参考方向是关联 的,ui 乘积表示元件吸收的功率,吸收的功率为负,所以元件实际是发出功率;图(b )中0u >,0i >,所以0ui >。而图(b )中电压电流参考方向是非关联的,ui 乘积表示元件发出的功率,发出的功率为正,所以元件实际是发出功率。 1-3 求解电路以后,校核所得结果的方法之一是核对电路中所有元件的功率平衡,即一部分元件发出的总功率应等于其他元件吸收的总功率。试校核题1-3图中电路所得解答是否正确。 解:由图可知元件A 的电压电流为非关联参考方向,其余元件的电压电流均为关联参考方向,所以各元件的功率分别为 605300W 0A P =?=>发 发出功率300W , 题1-1图 题1-3图
60160W 0B P =?=>吸 吸收功率60W , 602120W 0C P =?=>吸 吸收功率120W , 40280W 0D P =?=>吸 吸收功率80W , 20240W 0E P =?=>吸 吸收功率40W , 电路吸收的总功率为601208040300B C D E p p p p p W =+++=+++= 即元件A 发出的总功率等于其余元件吸收的总功率,满足功率平衡。 1-4 在指定的电压u 和电流i 的参考方向下,写出题1-4 图所示各元件的u 和 i 的 约束方程(即VCR )。 解(a )电阻元件,u 、i 为关联参考方向。 由欧姆定律u = R i = 104 i (b )电阻元件,u 、i 为非关联参考方向 由欧姆定律u = - R i = -10 i (c )理想电压源与外部电路无关,故 u = 10V (d )理想电压源与外部电路无关,故 u = -5V (e) 理想电流源与外部电路无关,故 i=10×10-3A=10-2A (f )理想电流源与外部电路无关,故 i=-10×10-3A=-10-2A 1-5试求题1-5图中各电路中电压源、电流源及电阻的功率(须说明是吸收还是发出)。 10Ω10V 题1-4图
第1章引言 1.1 学习指导 1.1.1 要点 本章的要点有通信系统的数学模型,通信系统的分类及通信方式,信息及其度量,通信系统的主要性能指标。 1.通信系统的数学模型 通信系统是指传递消息所需的一切技术设备(含信道)的总和。通信系统的作用就是将信息从信源发送到一个或多个目的地。 (1)一般模型 以图1-1所示的功能框图来表示。 图1-1通信系统的一般模型 信息源。信源所产生的信息可以是声音、图像或文本。信息源一般包含变换器,将信源的输出变换成电信号。例如,用作变换器的话筒,可以将语音信号变换成电信号,而摄像机则将图像信号变换成电信号。这些设备输出的信号一般称为基带信号。在接收端,使用类似的变换器就可以将接收到的电信号变换成适合用户的形式,如声音信号、图像等。 发送设备。发送设备将原始基带电信号变换成适合物理信道或其他传输介质传输的形式。例如在无线电和电视广播中,通信部门规定了各发射台的频率范围,因此,发射机必须将待发送的信息信号转换到适合的频率范围来发送,以便与分配给此发射机的频率相匹配。这样,由多个无线电台发送的信号就不会彼此干扰。又如果信道是光纤组成的,那么发送设备就要将处理好的基带信号转换光波信号再发送。因此发送设备涵盖的内容很多,可能包含变换、放大、滤波、编码调制等过程。对于多路传输系统,发送设备中还包括多路复用器。 信道。信道用于将来自发送设备的信号发送到接收端的物理介质。信道可以分为两大类:无线信道和有线信道。在无线信道中,信道可以是大气、自由空间和海水。有线信道有双绞电话线、同轴电缆及光纤等。信道对不同种类的信号有不同的传输特性,但都会对在信道中传输的信号产生衰减,信道中的噪声和由不理想接收机引入的噪声会引起接收信号的失真 接收设备。接收设备的功能是恢复接收信号中所包含的消息信号。使用和发送端相
第九章 线性系统的状态空间分析与综合 9-1 设系统的微分方程为 u x x x =++23&&& 其中u 为输入量,x 为输出量。 ⑴ 设状态变量x x =1,x x &=2,试列写动态方程; ⑵ 设状态变换211x x x +=,2122x x x --=,试确定变换矩阵T 及变换后的动态方程。 解:⑴ u x x x x ??????+????????????--=???? ??1032102121&&,[]??????=2101x x y ; ⑵ ??????=??????2121x x T x x ,??????--=2111T ;?? ????--=-11121 T ;AT T A 1-=,B T B 1-=,CT C =; 得,??????--=2111T ;u x x x x ??????-+??????????? ?-=??????1110012121&&,[]??????=2111x x y 。 9-2 设系统的微分方程为 u y y y y 66116=+++&&&&&& 其中u 、y 分别系统为输入、输出量。试列写可控标准型(即A 为友矩阵)及可观标准型(即A 为友矩 阵转置)状态空间表达式,并画出状态变量图。 解:可控标准型和可观标准型状态空间表达式依次为, []x y u x x 00610061161 00010=??????????+??????????---=&;[]x y u x x 100 006610 1101600=???? ? ?????+??????? ???---=&; 可控标准型和可观标准型的状态变量图依次为, 9-3 已知系统结构图如图所示,其状态变量为1x 、2x 、3x 。试求动态方程,并画出状态变量图。 解:由图中信号关系得,31x x =&,u x x x 232212+--=&,32332x x x -=&,1x y =。动态方程为 u x x ?? ?? ? ?????+??????????---=020*********&,[]x y 001;
现代控制理论基础考试题 西北工业大学考试题(A卷) (考试时间120分钟) 学院:专业:姓名:学号: 一.填空题(共27分,每空1.5分) 1.现代控制理论基础的系统分析包括___________和___________。 2._______是系统松弛时,输出量、输入量的拉普拉斯变换之比。 3.线性定常系统齐次状态方程是指系统___________时的状态方程。 4.推导离散化系统方程时在被控对象上串接一个开关,该开关以T 为周期进行开和关。这个开关称为_______。 5.离散系统的能______和能______是有条件的等价。 6.在所有可能的实现中,维数最小的实现称为最小实现,也称为 __________。 7.构造一个与系统状态x有关的标量函数V(x, t)来表征系统的广义 能量, V(x, t)称为___________。 8.单输入-单输出线性定常系统,其BIBO稳定的充要条件是传递函
数的所有极点具有______。 9. 控制系统的综合目的在于通过系统的综合保证系统稳定,有满意的_________、_________和较强的_________。 10. 所谓系统镇定问题就是一个李亚普诺夫意义下非渐近稳定的 系统通过引入_______,以实现系统在李亚普诺夫意义下渐近稳定的问题。 11. 实际的物理系统中,控制向量总是受到限制的,只能在r 维控 制空间中某一个控制域内取值,这个控制域称为_______。 12. _________和_________是两个相并行的求解最优控制问题的 重要方法。 二. 判断题(共20分,每空2分) 1. 一个系统,状态变量的数目和选取都是惟一的。 (×) 2. 传递函数矩阵的描述与状态变量选择无关。 (√) 3. 状态方程是矩阵代数方程,输出方程是矩阵微分方程。 (×) 4. 对于任意的初始状态)(0t x 和输入向量)(t u ,系统状态方程的解存在并且 惟 一 。 (√) 5. 传递函数矩阵也能描述系统方程中能控不能观测部分的特性。 (×)
第一章 1.(Q1) What is the difference between a host and an end system List the types of end systems. Is a Web server an end system Answer: There is no difference. Throughout this text, the words “host” and “end system” are used interchangeably. End systems inc lude PCs, workstations, Web servers, mail servers, Internet-connected PDAs, WebTVs, etc. 2.(Q2) The word protocol is often used to describe diplomatic relations. Give an example of a diplomatic protocol. Answer: Suppose Alice, an ambassador of country A wants to invite Bob, an ambassador of country B, over for dinner. Alice doesn’t simply just call Bob on the phone and say, come to our dinner table now”. Instead, she calls Bob and suggests a date and time. Bob may respond by saying he’s not available that particular date, but he is available another date. Alice and Bob continue to send “messages” back and forth until they agree on a date and time. Bob then shows up at the embassy on the agreed date, hopefully not more than 15 minutes before or after the agreed time. Diplomatic protocols also allow for either Alice or Bob to politely cancel the engagement if they have reasonable excuses. 3.(Q3) What is a client program What is a server program Does a server program request and receive services from a client program Answer: A networking program usually has two programs, each running on a different host, communicating with each other. The program that initiates the communication is the client. Typically, the client program requests and receives services from the server program.
西北工业大学考试试题(卷)2008 -2009 学年第2 学期
2009年《现代控制理论》试卷A 评分标准及答案 第一题(10分,每个小题答对1分,答错0分) (1)对 (2)错 (3)对 (4)错 (5)对 (6)对 (7)对 (8)对 (9)对 (10)错 第二题(15分) (1))(t Φ(7分):公式正确3分,计算过程及结果正确4分 ? ? ? ???+-+---=-=Φ?? ?? ??????+- +-+- +-+- ++-+=??????-+++=-??? ???+-=------------t t t t t t t t e e e e e e e e A sI L t s s s s s s s s s s s s A sI s s A sI 22221 11 2222}){()(22112 21221112112 213)2)(1(1 )(321 (2) 状态方程有两种解法(8分):公式正确4分,计算过程及结果正确4分 ??????-+-+-=????? ???????+-+++-+++-++??????+--=??????????? ???????++-++++-=-+-=??????---+-=????? ?+--+??? ???+--=??????-Φ+Φ=------------------------------??t t t t t t t t t t t t t t t t t t t t t e e te e e te s s s s s s L e e e e t x t x s s s s s L x A sI L t x s BU A sI x A sI s X e e t e e t d e e e e e e e e e t x t x d t Bu x t t x 222 21 22212 21111122)(02222210 2344}2414)1(42212)1(4 {2)()(} )2()1(4) 2()1()3(2{)}0(){()() ()()0()()(2)34()14(22222)()()()()0()()(或者 ττ τττττττ 第三题(15分,答案不唯一,这里仅给出可控标准型的结果) (1) 系统动态方程(3分) []x y u x x 0010 1003201 00010=???? ??????+??????????--=&
哈工大2010年春季学期 现代控制理论基础 试题A 答案 一.(本题满分10分) 如图所示为一个摆杆系统,两摆杆长度均为L ,摆杆的质量忽略不计,摆杆末端两个质量块(质量均为M )视为质点,两摆杆中点处连接一条弹簧,1θ与2θ分别为两摆杆与竖直方向的夹角。当12θθ=时,弹簧没有伸长和压缩。水平向右的外力()f t 作用在左杆中点处,假设摆杆与支点之间没有摩擦与阻尼,而且位移足够小,满足近似式sin θθ=,cos 1θ=。 (1)写出系统的运动微分方程; (2)写出系统的状态方程。 【解】 (1)对左边的质量块,有 ()2111211cos sin sin cos sin 222 L L L ML f k MgL θθθθθθ=?-?-?- 对右边的质量块,有 ()221222sin sin cos sin 22 L L ML k MgL θθθθθ=?-?- 在位移足够小的条件下,近似写成: ()112124f kL ML Mg θθθθ=--- ()21224kL ML Mg θθθθ=--
即 112442k g k f M L M ML θθθ??=-+++ ??? 21244k k g M M L θθθ??=-+ ??? (2)定义状态变量 11x θ=,21x θ=,32x θ=,42x θ= 则 12 2133441344244x x k g k f x x x M L M ML x x k k g x x x M M L =?? ???=-+++ ???? ? =????=-+? ????? 或写成 11 22334401 000014420001000044x x k g k x x M L M f ML x x x x k k g M M L ? ? ?? ?????????? ??-+???? ? ??????????=+??? ? ????? ?????????????????? ?????-+?? ? ? ?????? ? 二.(本题满分10分) 设一个线性定常系统的状态方程为= x Ax ,其中22R ?∈A 。 若1(0)1?? =??-??x 时,状态响应为22()t t e t e --??=??-?? x ;2(0)1??=??-??x 时,状态响应为 2()t t e t e --?? =??-?? x 。试求当1(0)3??=????x 时的状态响应()t x 。 【解答】系统的状态转移矩阵为()t t e =A Φ,根据题意有 221()1t t t e t e e --????==????--???? A x 22()1t t t e t e e --????==????--???? A x 合并得
第一章半导体器件基础 1.试求图所示电路的输出电压Uo,忽略二极管的正向压降和正向电阻。 解: (a)图分析: 1)若D1导通,忽略D1的正向压降和正向电阻,得等效电路如图所示,则U O=1V,U D2=1-4=-3V。即D1导通,D2截止。 2)若D2导通,忽略D2的正向压降和正向电阻,得等效电路如图所示,则U O=4V,在这种情况下,D1两端电压为U D1=4-1=3V,远超过二极管的导通电压,D1将因电流过大而烧毁,所以正常情况下,不因出现这种情况。 综上分析,正确的答案是U O= 1V。 (b)图分析: 1.由于输出端开路,所以D1、D2均受反向电压而截止,等效电路如图所示,所以U O=U I=10V。
2.图所示电路中, E 解: (a)图 当u I<E时,D截止,u O=E=5V; 当u I≥E时,D导通,u O=u I u O波形如图所示。 u I ωt 5V 10V uo ωt 5V 10V (b)图 当u I<-E=-5V时,D1导通D2截止,uo=E=5V; 当-E<u I<E时,D1导通D2截止,uo=E=5V; 当u I≥E=5V时,uo=u I 所以输出电压u o的波形与(a)图波形相同。 5.在图所示电路中,试求下列几种情况下输出端F的电位UF及各元件(R、DA、DB)中通过的电流:( 1 )UA=UB=0V;( 2 )UA= +3V,UB = 0 V。( 3 ) UA= UB = +3V。二极管的正向压降可忽略不计。 解:(1)U A=U B=0V时,D A、D B都导通,在忽略二极管正向管压降的情况下,有:U F=0V mA k R U I F R 08 .3 9.3 12 12 = = - = 《现代控制理论参考答案》 第一章答案 1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。 1 1K s K K p +s K s K p 1 +s J 11s K n 2 2s J K b - + + - +- ) (s θ)(s U 图1-27系统方块结构图 解:系统的模拟结构图如下: ) (s U ) (s θ-- - + ++图1-30双输入--双输出系统模拟结构图 1 K p K K 1p K K 1++ +p K n K ? ? ?1 1J ? 2 J K b ? ?- 1 x 2 x 3 x 4 x 5x 6x 系统的状态方程如下: u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x p p p p n p b 1611166 13153 46 1 51 41 31 33 222 11+ - - =+-==+ + - - == =? ? ? ? ? ? 令y s =)(θ,则1x y = 所以,系统的状态空间表达式及输出方程表达式为 []????????? ???????????=??????? ? ?????????? ????+?? ???????? ?????????????????????? ? ??? ? ???????? ?---- -=??????????????????????????????6543211654321111111126543 2100 0001 000000 00 0000 0001 00100000 000 000 10 x x x x x x y u K K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p p p n p b 1-2有电路如图1-28所示。以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。 R1 L1 R2 L2 C U ---------Uc --------- i1 i2图1-28 电路图 绪论 为了帮助大家在期末复习中能更全面地掌握书中知识点,并且在以后参加考研考博考试直到工作中,为大家提供一个理论参考依据,我们11级自动化二班的同学们在王整风教授的带领下合力编写了这本《现代控制理论习题集》(刘豹第三版),希望大家好好利用这本辅助工具。 根据老师要求,本次任务分组化,责任到个人。我们班整体分为五大组,每组负责整理一章习题,每个人的任务由组长具体分配,一个人大概分1~2道题,每个人任务虽然不算多,但也给同学们提出了要求:1.写清题号,抄题,画图(用CAD或word画)。2.题解详略得当,老师要求的步骤必须写上。3.遇到一题多解,要尽量写出多种方法。 本习题集贯穿全书,为大家展示了控制理论的基础、性质和控制一个动态系统的四个基本步骤,即建模、系统辨识、信号处理、综合控制输入。我们紧贴原课本,强调运用统一、联系的方法分析处理每一道题,将各章节的知识点都有机地整合在一起,力争做到了对控制理论概念阐述明确,给每道题的解析赋予了较强的物理概念及工程背景。在课后题中出现的本章节重难点部分,我们加上了必要的文字和图例说明,让读者感觉每一题都思路清晰,简单明了,由于我们给习题配以多种解法,更有助于发散大家的思维,做到举一反三! 这本书是由11级自动化二班《现代控制理论》授课老师王整风教授全程监管,魏琳琳同学负责分组和发布任务书,由五个小组组组长李卓钰、程俊辉、林玉松、王亚楠、张宝峰负责自己章节的初步审核,然后汇总到胡玉皓同学那里,并由他做最后的总审核工作,绪论是段培龙同学和付博同学共同编写的。 本书耗时两周,在同学的共同努力下完成,是二班大家庭里又一份智慧和努力的结晶,望大家能够合理使用,如发现错误请及时通知,欢迎大家的批评指正! 2014年6月2日 第一章 控制系统的状态空间表达式 1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式 解:系统的模拟结构图如下: 系统的状态方程如下: 令y s =)(θ,则1x y = 所以,系统的状态空间表达式及输出方程表达式为 1-2有电路如图1-28所示。以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。 解:由图,令32211,,x u x i x i c ===,输出量22x R y = 前言 本书是为了与张嗣瀛院士等编写的教材《现代控制理论》相配套而编写的习题解答。 本书对该教材中的习题给予了详细解答,可帮助同学学习和理解教材的内容。由于习题数量较多,难易程度不同,虽然主要对象是研究型大学自动化专业本科学生,但同时也可以作使用其它教材的专科、本科、以及研究生的学习参考书。 书中第5、6、8章习题由高立群教授组织编选和解答;第4、7 章由井元伟教授组织编选和解答,第1、2章由郑艳副教授组织编选和解答。 由于时间比较仓促,可能存在错误,请读者批评、指正。另外有些题目解法和答案并不唯一,这里一般只给出一种解法和答案。 编者 2005年5月 第2章 “控制系统的状态空间描述”习题解答 2.1有电路如图P2.1所示,设输入为1u ,输出为2u ,试自选状态变量并列写出其状态空间表达式。 图P2.1 解 此题可采样机理分析法,首先根据电路定律列写微分方程,再选择状态变量,求得相应的系统状态空间表达式。也可以先由电路图求得系统传递函数,再由传递函数求得系统状态空间表达式。这里采样机理分析法。 设1C 两端电压为1c u ,2C 两端的电压为2c u ,则 2 12221c c c du u C R u u dt ++= (1) 1121 21c c c du u du C C dt R dt += (2) 选择状态变量为11c x u =,22c x u =,由式(1)和(2)得: 1121121121212111 c c c du R R C u u u dt R R C R C R C +=--+ 2121222222 111c c c du u u u dt R C R C R C =--+ 状态空间表达式为: 1211 1211212121 212 1222222 21111111R R C x x x u R R C R C R C x x x u R C R C R C y u u x +?=--+?? ? =--+?? ?==-?? && 即: 12121121211112222222211111R R C R C R R C R C x x u x x R C R C R C +???? -???? ????????=+????????????--??????? ? && []11210x y u x ?? =-+???? 2.2 建立图P22所示系统的状态空间表达式。 1 图P2.2 解 这是一个物理系统,采用机理分析法求状态空间表达式会更为方便。令()f t 为输入量,即u f =,1M ,2M 的位移量1y ,2y 为输出量, 选择状态变量1x =1y ,2x = 2y ,3x =1 dy dt ,24dy x dt =。 根据牛顿定律对1M 有: 211311 () d x x M x Kx B dt -=--& 2008 现代控制理论试题B 卷及答案 一、1 系统[]210,01021x x u y x ????=+=????-???? &能控的状态变量个数是cvcvx ,能观测的状态变量个数是。(4分) 2试从高阶微分方程385y y y u ++=&&&&&求得系统的状态方程和输出方程(4分) 解: 1. 能控的状态变量个数是2,能观测的状态变量个数是1。状态变量个数是2。…..(4分) 2. 解:选取状态变量1 x y =,2x y =&,3x y =&&,可得 …..….…….(1分) 12 23 3131 835x x x x x x x u y x ===--+=&&& …..….…….(1分) 写成 010*********x x u ???? ????=+????????--???? & …..….…….(1分) []100y x = …..….…….(1分) 二、1给出线性定常系统(1)()(), ()()x k Ax k Bu k y k Cx k +=+=能控的定义。 (3分) 2已知系统[]210 020,011003x x y x ????==?? ??-?? &,判定该系统是否完全能观?(5分) 解: 1.答:若存在控制向量序列(),(1),,(1)u k u k u k N ++-L ,时系统从第k 步的状态()x k 开始,在第N 步达到零状态,即()0x N =,其中N 是大于0的有限数,那么就称此系统在第k 步上是能控的。若对每一个k ,系统的所有状态都是能控的,就称系统是状态完全能控的,简称能控。…..….…….(3分) 2. [][]320300020012 110-=???? ??????-=CA ………..……….(1分) 现代控制理论试题及答案 一、(10分)考虑如图的质量弹簧系统。其中,m 为运动物体的质量,k 为弹簧的弹性系数,h 为阻尼器的阻尼系数,f 为系统所受外力。取物体位移为状态变量x 1,速度为状态变量x 2,并取位移为系统输出y ,外力为系统输入u ,试建立系统的状态空间表达式。 解 f ma =……………………………….……1分 令位移变量为x 1,速度变量为x 2,外力为输入u ,有 122u kx kx mx --=&………………………………2分 于是有 12x x =&………………………………..……………1分 2121 k h x x x u m m m =- -+&……….….……………….2分 再令位移为系统的输出y ,有 1y x =…………………………….……….1分 写成状态空间表达式,即矩阵形式,有 11 220101x x u k h x x m m m ???? ????????=+???? ????--?? ?????? &&………..……………..2分 []1210x y x ?? =???? ……………………..……….……….2分 二、(8分)矩阵A 是22?的常数矩阵,关于系统的状态方程式=&x Ax ,有 1(0)1??=??-??x 时,22t t e e --??=??-??x ;2(0)1?? =??-??x 时,2t t e e --??=??-?? x 。 试确定状态转移矩阵(,0)t Φ和矩阵A 。 解 因为系统的零输入响应是 ()(,0)(0)t t =x x Φ……………..……….……….2分 所以 221(,0)1t t e t e --????=????--???? Φ,22(,0)1t t e t e --???? =????--????Φ 将它们综合起来,得 22122(,0)11t t t t e e t e e ----???? =????---?? ??Φ……………….……….2分 1 22222222122(,0)11122112222t t t t t t t t t t t t t t t t e e t e e e e e e e e e e e e e e -----------------???? =????----?? ??--????=????--??????--=??--?? Φ …………….……….2分 而状态转移矩阵的性质可知,状态转移矩阵0(,)t t Φ满足微分方程 ()()00,,d t t t t dt =A ΦΦ 和初始条件 ()00,t t =I Φ 因此代入初始时间00t =可得矩阵A 为: 01000 22220 (,)(,) 222424t t t t t t t t t t t d t t t t dt e e e e e e e e -==--------=?? =??????-+-+=??-+-+??A ΦΦ…………….……….1分 0213?? =?? --?? …………………………………….……….1分 三、(10分)(1)设系统为 ()()()011, (0)011a t t u t x b -?????? =+=?????? -?????? &x x 试求出在输入为(0)u t t =≥时系统的状态响应(7分)。 (2)已知系统[]011, 11341u y ???? =+=-?? ??-???? &x x x ,写出其对偶系统(3分)。 解 (1) 第一章习题答案 1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。 图1-27系统方块结构图 解:系统的模拟结构图如下: 图1-30双输入--双输出系统模拟结构图 系统的状态方程如下: u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x p p p p n p b 161116613153 46 1 5141313322211 +-- =+-==++--== =??? ?? ? 阿 令y s =)(θ,则1x y = 所以,系统的状态空间表达式及输出方程表达式为 []????? ? ??? ? ??????????=??????? ???????????????+?????? ?????????????????????????? ????????????? ?-----=????????????????????????????? ?654321165432111111112654321000001000000 0000000100 10000000000010x x x x x x y u K K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p p p n p b 1-2有电路如图1-28所示。以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。 L1L2 U 图1-28 电路图 解:由图,令32211,,x u x i x i c ===,输出量22x R y = 有电路原理可知:? ? ? +==+=++3 213 222231111x C x x x x R x L u x x L x R 既得 2 221332 2222131111111111x R y x C x C x x L x L R x u L x L x L R x =+- =+-=+-- =? ? ? 写成矢量矩阵形式为: 现代控制理论试卷作业 一.图为R-L-C 电路,设u 为控制量,电感L 上的支路电流 11121222121212010Y x U R R R R Y x R R R R R R ????????????=+????????-????+++???????? 和电容C 上的电压2x 为状态变量,电容C 上的电压2x 为输出量,试求:网络的状态方程和输出方程(注意指明参考 方向)。 解:此电路没有纯电容回路,也没有纯电感电路,因有两个储能元件,故有独立变量。 以电感L 上的电流和电容两端的电压为状态变量,即令:12,L c i x u x ==,由基尔霍夫电压定律可得电压方程为: 从上述两式可解出1x ?,2x ? ,即可得到状态空间表达式如下: ??????21y y =????????++-211212110R R R R R R R ??????21x x +u R R R ????????+2120 二、考虑下列系统: (a )给出这个系统状态变量的实现; (b )可以选出参数K (或a )的某个值,使得这个实现或者丧失能控性,或者丧失能观性,或者同时消失。 解:(a )模拟结构图如下: 则可得系统的状态空间表达式: (b ) 因为 3023A -??=??? 0013 k k a -??-??-? 110b ????=?????? 所以:当1a =时,该系统不能控;当1a ≠时,该系统能控。 又因为:[2C = 1 ]0 所以:当0k =或1a =时,该系统不能观;当0k ≠且1a ≠时,该系统能观。 综上可知:当1a =时或0k =且1a =时,该系统既不能控也不能观。 三、已知系统. Ax x =?的状态转移矩阵为: (1)试确定矩阵A ,并验证At e 确为上式。 第一章 1.1 图1.18是液位自动控制系统原理示意图。在任意情况下,希望液面高度试说明系 统工作原理并画出系统方块图。 解:系统的控制任务是保持液面高度不变。水箱是被控对象,水箱液位是被控变量。电位器 用来设置期望液位高度c* (通常点位器的上下位移来实现)。 当电位器电刷位于中点位置时,电动机不动,控制阀门有一定的开度,使水箱的流入水 量与流出水量相等,从而使液面保持在希望高度c*上。一旦流出水量发生变化(相当于扰动),例如当流出水量减小时,液面升高,浮子位置也相应升高,通过杠杆作用使电位器电刷从中点位置下移,从而给电动机提供一定的控制电压,驱动电动机通过减速器减小阀门开度,使进入水箱的液体流量减少。这时,水箱液位下降?浮子位置相应下降,直到电位器电刷回到中点位置为止,系统重新处于平衡状态,液位恢复给定高度。反之,当流出水量在平衡状态基础上增大时,水箱液位下降,系统会自动增大阀门开度,加大流入水量,使液位升到给定 高度c*。 系统方框图如图解1.4.1所示。 图S 1-4.1液位自动控制垂统方框图 c维持不变 , 1.2恒温箱的温度自动控制系统如图 1.19所示。 (1) 画出系统的方框图; (2) 简述保持恒温箱温度恒定的工作原理 ; (3) 指出该控制系统的被控对象和被控变量分别是什么。 图1.19恒温箱的温度自动控制系统 解:恒温箱采用电加热的方式运行, 电阻丝产生的热量与调压器电压平方成正比, 电压增 高,炉温就上升。调压器电压由其滑动触点位置所控制, 滑臂则由伺服电动机驱动?炉子的 实际温度用热电偶测量, 输出电压作为反馈电压与给定电压进行比较, 得出的偏差电压经放 大器放大后,驱动电动机经减速器调节调压器的电压。 在正常情况下,炉温等于期望温度 T ,热电偶的输出电压等于给定电压。 此时偏差为零, 电动机不动,调压器的滑动触点停留在某个合适的位置上。 这时,炉子散失的热量正好等于 从电阻丝获取的热量,形成稳定的热平衡状态,温度保持恒定。 当炉温由于某种原因突然下降 (例如炉门打开造成热量流失 )时,热电偶输出电压下降, 与给定电压比较后出现正偏差, 经放大器放大后,驱动电动机使调压器电压升高, 炉温回升, 直至温度值等于期望值为止。当炉温受扰动后高于希望温度时, 调节的过程正好相反。最终 达到稳定时,系统温度可以保持在要求的温度值上。 系统中,加热炉是被控对象,炉温是被控变量,给定量是给定电位器设定的电压 (表征 炉温的希望值)。给定电位计是给定元件,放大器完成放大元件的功能,电动机、减速器和 调压器组 成执行机构,热电偶是测量元件。 系统方框如图解1.4.5所示。 1.3 解:当负载(与接收自整角机 TR 的转子固联)的角位置 亠与发送机Tx 转子的输入角位置 6 一致时,系统处于相对豫止状态,自整角机输出电压 (即偏差电压)为0,放大器输出为 0, 电动机不动,系统保持在平衡状态。当 R 改变时,亠与二i 失谐,自整角接收机输出与失谐 给定电压 图解1.4.5恒温箱温度控制系统框图《现代控制理论》第3版课后习题答案
现代控制理论课后习题答案
现代控制理论课后习题答案
东北大学现代控制理论试题及答案
现代控制理论试题及答案 研究生现代控制工程试卷
《现代控制理论》课后习题全部答案(最打印版)
现代控制理论试卷答案与解析
自动控制原理_第一章课后习题解答
相关主题
文本预览