四象限探测器光斑尺寸测量方法的研究
- 格式:pdf
- 大小:190.47 KB
- 文档页数:3
基于四象限探测的激光跟踪系统的设计与实现刘思鸣;何宁;邓德迎【摘要】为提高激光目标系统跟踪能力,提出了一种基于四象限探测的激光跟踪系统.采用四象限探测器完成光斑位置检测与目标信息接收,分析传感器光照位置的输出电流误差变化与光斑偏离光敏面中心坐标对应关系,感知和判断目标方位及运动方向,通过伺服系统的闭环控制方法,实现激光快速跟踪,利用上位机对被跟踪目标的方位信息进行图形监测.实验测试表明,采用四象限光电检测构建的激光目标伺服跟踪系统,能快速搜寻锁定目标,并实施激光指向干扰,在目标位置±20°移动变化时,系统跟踪误差约为0.1%,跟踪速度达到22.6°/s,实验结果为激光跟踪的实际应用提供一定参考价值.【期刊名称】《桂林电子科技大学学报》【年(卷),期】2019(039)001【总页数】5页(P7-11)【关键词】光电探测;位置传感;激光跟踪;伺服控制【作者】刘思鸣;何宁;邓德迎【作者单位】桂林电子科技大学信息与通信学院,广西桂林 541004;桂林电子科技大学信息与通信学院,广西桂林 541004;桂林电子科技大学信息与通信学院,广西桂林 541004;桂林航天工业学院广西高校无人机遥测重点实验室,广西桂林541004【正文语种】中文【中图分类】TN249激光跟踪具有高精度、无导轨、大范围、实时动态等优点,它集计算技术、电子技术、精密机械、控制技术于一体,在激光制导领域有着广泛应用[1]。
激光跟踪是实现激光精确制导的基础,经过四十多年的快速发展,激光制导技术和各种激光制导武器已成为高科技的现代和未来战争克敌制胜的重要手段,其中激光制导武器系统具有制导精度高、抗干扰能力强、结构简单、成本低等优势,因而各军事大国都竞相开展研制[2]。
针对激光跟踪系统快速对准能力问题,应用位置传感器完成光斑位置检测与信息接收,通过平衡状态误差分析,采用伺服系统控制实现激光目标的快速跟踪,经实验测试,系统能获取跟踪目标的方位信息,并利用干扰激光对跟踪目标实现锁定指向,为系统应用研究奠定基础。
大视场四象限探测光学系统设计薛珮瑶;吴耀;冯茜;李川【摘要】In order to realize large field laser detecting and tracking , the characteristics of optical system are analyzed.First, based on the requirement of light spots uniformity for four-quadrant detector and system inde-xes, the premium structure of optical system is selected and the method of aberration correcting is presented . Then the large field optical system for four-quadrant detector is designed by using the ZEMAX software .The light spots quality is evaluated by the spot diagram , footprint and encircled energy while the distribution of the rays illuminance on the quadrant detector is obtained by TRACEPRO software .Finally, manufacture and as-sembly for the optical system are finished and optical performance is tested based on designingresult .Testing results indicate that linear field of laser detection system is 6 degree and precision of angle measurement is less than 0.15degree.Testing curve is consistent with theoretical curve , which validates correction of the design .%为了实现大视场激光探测跟踪,分析了大视场激光探测光学系统的研制特点。
四象限探测器输出非均匀性分析与矫正张骏;钱惟贤;刘泽伟【摘要】对四象限光电探测器系统的原理及其定位误差进行了分析,并提出了一种标定并修正其固有误差以及四象限非均匀性的方法.推导得出了入射光线偏移角度和输出电压的关系,并通过实验和计算得到了证实.为改善四象限探测器探测精度以及消除各项误差的影响提供了一种方法.【期刊名称】《红外技术》【年(卷),期】2016(038)007【总页数】6页(P565-570)【关键词】四象限光电探测器;目标定位;光斑偏移;定位误差【作者】张骏;钱惟贤;刘泽伟【作者单位】南京理工大学电子工程与光电技术学院,江苏南京210094;南京理工大学电子工程与光电技术学院,江苏南京210094;南京理工大学电子工程与光电技术学院,江苏南京210094【正文语种】中文【中图分类】TN215四象限探测器具有灵敏度和位置分辨率高、光谱范围宽、体积小、响应快、动态范围宽等特点,因而广泛应用于激光准直、激光制导、目标定位及自动跟踪等精密光电检测系统中,通过定位目标光斑的中心位置来检测其位移量或角偏移量的大小[1]。
四象限探测器的工作精度主要受周围环境因素、目标光斑大小、光斑能量分布、器件响应差异和系统噪声所带来的四象限不均匀性的影响,本文主要提出一种算法对四象限光电探测系统的非均匀性和固有误差进行标定和修正,并通过具体实验验证了该理论和方法的可行性[2]。
四象限探测器件的基本结构如图1所示,四象限光电探测器由4个形状相同、位置对称、面积相等且性能参数也基本相同的光敏探测区域构成,当有相应波长的入射光照射在探测器光敏面上时,探测器的各个区域将输出相应大小的电信号,通过对这4个输出电信号的计算处理,可以确定入射光点照射在感光面上的坐标位置[3]。
其中象限之间的间隔区域被称为“盲区”,工艺上要求将其做得越窄越好。
盲区将4个光电二极管分为A、B、C、D四部分,探测器工作时,来自目标的入射光线经光学系统汇聚形成光斑,映射在光敏面上,形成半径为r的圆形光斑,光斑中心坐标为(x, y)。
解析波前传感器波前传感器在自适应光学系统中起着至关重要的作用,其通过实时测定动态入射波前的相位畸变,为波前重构及校正提供信息。
与其他传感器不同,由于不同应用场合下光学系统误差源所造成的波前相位扰动的时间和空间带宽范围大,自适应光学系统中的波前传感器必须具有足够高的时间和空间分辨率。
对于用作星体与微弱目标观察的自适应望远镜系统,还由于在一个子孔径和一次采样时间内所能利用的来自目标或人造信标的光能量极其有限(通常在光子计数的水平),因此要求波前传感器必须达到或接近光子噪声受限探测能力。
一般地,波前传感器有五项重要的技术指标:(1)被测面波前与探测面光强之间满足何种数学关系及是否严格满足理论论证的数学关系。
(2)传感器的能量透过率。
(3)波前传感器中探测器的性能参数,如量子效应、信噪比等。
(4)波前传感器数据处理能力及数据传输速度。
(5)传感器适用的参考光源。
不同的传感器适用于不同的参考光源,有的仅适合于单色性好的点光源(如曲率传感器),有的则适合于宽光谱的点光源或扩展光源(如夏克-哈特曼波前传感器)。
直接传感方法即直接探测被测波前的特征量。
根据传感方式可分为区域传感和模式传感两种。
区域传感是将波前在空间划分为若干子区域,探测出各个子区域的整体或平均特征量,继而重构出整个波前分布。
由于光波沿其传播方向的光强变化同光波波前的斜率与曲率相关,故该类方法在数学模型上主要分为两类:一类是通过测量波前斜率获得波前相位信息,典型的有剪切干涉法、夏克-哈特曼波前传感法、金字塔波前传感法以及由这些方法派生出的其他类似方法;另一类是通过测量波前曲率获得波前相位信息,典型的有波前曲率传感法。
而模式传感方法是将整个光瞳面相位分布在模式上分解成若干阶波前,通过探测出各阶模式系数,继而重构出整个波前分布,典型的有整体倾斜传感器、离焦传感器、光学全息波前传感器等。
1. 夏克-哈特曼波前传感器1.1 点目标夏克-哈特曼波前传感器1)基本原理在光学测量中,德国的哈特曼于1900年提出根据几何光学原理测定物镜几何像差或反射镜面形误差的经典哈特曼法,如图1所示。
第36卷 第5期 2006年5月 激光与红外
IASER & INFRARED Vo1.36,No.5
May,2006
文章编号:1001-5078(2006)05-0396-03 轨距传感器中激光光斑大小的影响
陈士谦,张志峰,匡萃方 (北京交通大学理学院,北京1oo044)
摘要:文中基于四象限光电探测器和三角测量方法,经过相似三角形的近似处理,提出了一 种用于铁轨轨道几何参数检测的新型激光位移传感器。该传感器与其他方法不同之处是:激 光器采用红外脉,中半导体激光器,这样避免了外界杂散光的影响;探测器采用四象限光电探测 器,响应频率高,避免了外界温度的干扰。重点分析和研究了激光器光斑,物体表面激光光斑 和四象限探测器探测的激光光斑大小的计算。从而调节激光器到一个最佳的位置。 关键词:四象限光电探测器;光斑;三角法;位移传感器;分辨率 中图分类号:TN249 文献标识码:A
Research on the Gauge Sensor Laser Spot CHEN Shi qian,ZHANG Zhi—feng,KUANG Cui—fang (School of Science,Beijing Jiaotong University,Beijing 100044,China)
Abstract:Based on the quadrant photodiode detector and triangulation method,a novel laser displacement sensor wis proposed for the gauge measurement.The laser sensor adopts the infrared laser and the quadrant photodiode to avoid the disturb.To adiuSt the infrared laser to the optimal place,we analyze and calculate the relation between the laser spot and the laser place. Key words:quadrant photodiode detector;spot;triangulation method;displacement sensor;resolution
第四章、其他典型的激光测量应用本章主要介绍以下内容:1. 激光Doppler 测速;2. 激光准直测量;3. 激光衍射法测量微珠、微丝直径;4. 激光散射法颗粒度测量。
§4.1 激光Doppler 测速及其应用速度是一个重要的物理量,其测量精度对科学研究、人们生活至关重要。
所以人们一直探索高精度的速度测量方法。
传统的测速方法通常是在被测液体或气体中加入一个测速传感器,将其感受到的与速度有关的信息送到二次仪表中进行处理,从而得到被测速度。
该测量方法属于接触式测量,传感器的放入必然会干扰流速场,从而影响测量精度。
而激光Doppler 测速是一种非接触性测量,可以克服传统测速方法的缺点,不仅可以提高测量精度,而且由于激光束非常细,还可以测量流速场分布,这是传统测速方法无法比拟的。
一、 激光Doppler 测速的原理1. Doppler 效应Doppler 效应是十九世纪德国物理学家Doppler 首先观察到的,一个向着声源运动的观察者所接收到的声波场的声波频率)/1(00'v v f f +=高于声波的实际频率0f ;而背向声源运动的观察者接收到的声波频率)/1(00"v v f f -=低于声波的实际频率0f ,其中0v 为声波的传播速度,v 为观察者或声波源的运动速度。
光波也是一种波,也同样存在Doppler 效应。
流速场中的粒子所感受到的光波场频率也同样产生了Doppler 频移,其所感受到的光波场的频率为)/1(0'c nv f f z ±=,粒子朝向光源运动,z v 前取“+”号,粒子背向光源运动z v 前取“-”号,而流速场中粒子所散射的光波场的频率就等于粒子所感受到的光波频率(瑞利散射),散射粒子相当于一个次波源。
所以只要测量出散射光的Doppler 频移量,也就得到了流速场的速度大小。
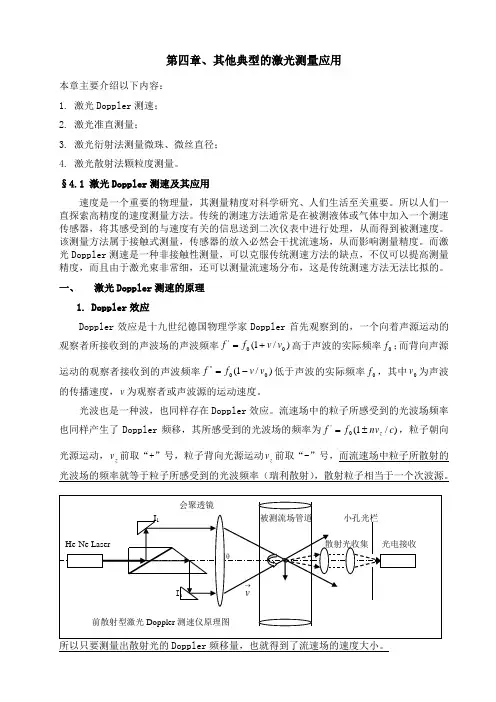
2. Doppler 信号的获得最常用的前向散射激光Doppler 测速仪原理光路如上图。
第42卷第7期 Vo1.42 NO.7 红外与激光工程
Infrared and Laser Engineering 2013年7月
Ju1.2013
基于四象序列的最大 熵原则的光轴对准方法 魏枫林,母一宁,尚瑞瑞,刘泉 (长春理工大学电子信息工程学院,吉林长春130022) 摘 要:四象限探测器目前被广泛应用于空间激光通信中的对准过程,但由于大气湍流的不良影响, 激光穿越大气在接收系统成像的时候,光斑产生形变以及破碎等不良影响,这严重地限制了四象限器 件的对准精度。由于四象限探测自身所能提供的光斑信息较为单一,相较于CCD器件,其处理自由度 较小。在分析研究基于CCD的序列光斑检测方法的理论基础之上,提出了一种基于四象限探测器的 光轴对准方法。通过统计某一段时间内四象限器件所输出的脱靶量值的范围,并根据其在不同象限的 分布概率计算出相应象限的熵作为加权系数,对原有计算公式进行加权计算,利用象限探测器高帧频 的优势弥补原本单一的信息,从而完成对大气湍流影响的抑制作用,并搭建实验平台,最终验证该算 法可以显著提高四象限器件的探测精度。 关键词:四象限探测器; 最大熵原则; 大气湍流 中图分类号:Vl1 文献标志码:A 文章编号:1007—2276(2013)07—1902—05
Method for optical alignment based on principle of maximum entropy of four・quadrant detector sequence
Wei Fenglin,Mu Yining,Shang Ruimi,Liu Quan (Electronic Information Engineering College,Changchun University of Science and Technology,Changchun 130022,China) Abstract:Four—quadrant detectors is widely used in the align process in the space lase communications. However,its adverse effects,such as deformation and spot broken,caused by the atmospheric turbulence, appear while the laser beam go through the atmosphere,which severely limits the alignment accuracy of the four—quadrant devices.Since four—quadrant detectors provide less message then the CCD,it S difficult to suppress the influence generated from the atmosphere.In this paper,a optical axis alignment method was proposed based on the four—quadrant detector.The value of the output miss distance of the four— quadrant detector for a certain time was calculated,the original formula was weighted by using the entropy that computing the entropy from the distribution probability of each quadrants.By taking advantage of the high frame rate of the quadrant detector,insufficient information was made up for to suppress the effect of the atmospheric turbulence,an experimental platform was set up,and a certain effect was achieved. Key words:four—quadrant detector;principle of maximum entropy; atmospheric turbulence
QD光斑位置检测影响因素分析摘要:四象限光电探测器(QD)以其帧频高、解算电路简单、可靠性好被广泛应用于激光通信的光轴对准过程中,在利用QD进行光斑位置检测时,要尽可能提高光斑位置的检测速度和检测精度。
由于光斑检测精度会受到背景光、大气湍流、探测器形状等因素影响,给光斑检测带来一定误差,使系统可靠性降低。
为了更好的抑制背景光、大气湍流等因素对光斑检测系统带来的影响,本文进行如下详细分析。
关键词:四象限探测器光斑检测背景光大气湍流四象限光电探测器以其高频谱响应范围,高定位精度,解算速度快等优点使其广泛应用于激光准直,激光对中,激光导向,激光制导,激光报警,激光侦查,激光自动跟踪等领域。
四象限光电探测器的每一个象限相当于一个PIN光电二极管,根据PIN光电二极管的特性,在一定的反偏工作电压下,PIN光电二极管所接收的光功率大小与其产生的光电流大小成正比。
其经典位置解算算法如下:令提取到的光电流信号与四象限探测器四个象限在坐标轴上的分布对应,分别为第一象限对应的光电流Ia,第二象限对应的光电流Ib,第三象限对应的光电流Ic,第四象限对应的光电流Id。
令光斑在四象限探测器四个光敏面上光功率为Ea、Eb、Ec、Ed,光斑实际位置坐标为(x0,y0),则有:1 背景光对光斑位置检测影响在上述四象限探测器解算公式(1)、(2)可以看出,当光斑检测系统的背景光均匀时,会导致偏移量公式中分母大小发生改变而分子不变,这就会使通过光斑解算得到的位置与实际光斑位置发生偏差,从而降低光斑位置的检测精度。
现在研究光斑在x轴的偏移量,由图2可以看出,随着背景光的加强,光斑的实际偏移量与解算偏移量的曲线线性范围在降低,造成光斑位置检测灵敏度下降,由于是激光光源当作信号源,为了减小或者消除背景光带来的影响,可以在接收端加窄带滤光片来抑制背景光的干扰,也可以采用数字信号处理的方式抑制背景光。
2 大气湍流对光斑位置检测影响大气光通信中面临的最大问题是大气信道的影响,包括大气衰减和大气湍流。
jE丞童适厶堂亟±坐位诠室il直1.1国内外滚转角误差测量的现状1.1.1重力方向基准测量法‘对于水平导轨滚转角的检测,一般多采用电子水平仪。
水平仪的外观如图1.2所示。
电子水平仪的工作原理是以重力方向为基准的。
水平仪是单一角度检测仪器,无法与其它自由度误差测量方法有效结合进行多自由度同时测量,这使水平仪的使用受到限制。
图1.2电子水平仪1.1.2实物位置基准测量法【21组合测量法是一种静态测量垂直导轨滚转角误差的有效方法。
原理如图1.3所示。
它是以四方铁的位置为基准,首先用安装在垂直导轨上的测微仪分别在两个不同的位置检测同一个四方铁的直线度,然后计算出垂直导轨的滚转角误差。
该方法为接触式,无法实时测量,其测量过程复杂,精度有限,特别对于大行程导轨更是无法实现。
四方铁(位冠1)接长杆/机器i诺≮幽1.3垂直导轨组合测鹫法2喘荔』E壅銮道厶堂亟±堂位i坌塞远堑酋途差捌量左选厦丕丝塞盛度(2)测量的参考光束,从特殊棱镜上表面反射回的光束用作直线度(1)测量的参考光束,两束光由两个四象限探测器接收,测量两个不同的直线度误差。
探测器上测得的信号经电路处理后,再经过模数转换,由单片机通过串口发送到计算机中进行处理,进而计算出滚转角并显示。
实际系统如图2,5所示。
图2.5测量系统实物图2.3系统组成测量系统主要由光路部分,光电探测部分,电路部分和软件部分组成。
2.3.1光路部分(1)光源常用于激光准直的激光器是氪氖激光器。
氦氖激光器输出的是连续光,光束质量好,光束发散角小,单色性和相干性好,稳定性好,但是氦氖激光器体积较大,驱动电压高,调节和维护比较复杂,与仪器小型化设计要求不符。
本测量系统采用半导体激光器,它除了具有其它激光器无可比拟的结构小巧、重量轻的优点外,还具有发光效率高、易于集成、结构简单、调制频率高、发射激光波长范围宽、使用寿命长等特性,并且可用直流稳压电源或电池供电,简化了激光器的电源设计。
火炮身管直线度检测方法评析【摘要】火炮身管弯曲,轻则降低射击精度,重则阻碍弹丸运动,以致产生膨胀、炸膛事故,为了发挥火炮的作战效能,提高弹丸目标命中率,炮管内径直线度的检测意义重大。
本文主要针对炮管内径直线度检测方法进行研究评价,主要包括:杠杆法、量规检测法、激光准直法、psd法及图像处理法,并给出炮管内径直线度检测最佳方法。
【关键词】直线度检测;激光准直;psd;图像处理1前言直线度测量是几何量计量领域最基本的项目,它是平面度、平行度、垂直度、同轴度等几何量测量的基础。
直线度测量也是机械制造业中非常重要的内容,与尺寸精度、圆度和粗糙度同称为影响产品质量的4大要素。
军工业中,火炮轴线直线度是一个非常重要的指标,它直接影响炮弹的命中精度。
大多的炮管属于细长管,轴线直线度,即空间直线度是直线度测量中属于较困难的领域。
针对这一问题,本文简单分析几种常用的炮管内径直线度检测方法。
直线度测量目前国内外采用较多的方法有激光准直法、量规检测法、杠杆法、psd法等[1],并给出高精度直线度检测方法[2]。
2 直线度检测几种主要检测方法(1)平晶干涉法(2)激光准直法激光准直法以准直激光束的能量中心作为测量基准,测量原理如图2所示。
激光器发出的激光经过准直系统后照射在测量元件,测量元件感知炮管被测截面实际中心位置的变化,其上装有的ccd可实时得到相应的图像,经图像处理后可获得各被测截面实际的圆心位置,再经直线度评定即可获得炮管的轴线直线度。
此方法原理简单,设备简单,精度较高。
但测量对象受硬件尺寸的影响较大,对于细长的炮管,此法很难实现。
(3)量规检测法(4)杠杆法杠杆法是目前我国一些生产单位正在使用的方法。
测量时,炮管在工作台上移动,测量元件感知被测截面圆心位置的变化,并通过杠杆反映给千分表进行读数。
其测量原理如图4所示。
此方法属于近似测量,每次测量的都是某一轴向截面内的直线度,要达到测量轴线直线度的目的,要多次旋转炮管。
实验三 扫描探针显微镜的构造及形貌分析一、目的要求1.了解扫描探针显微镜的结构和构成以及其所包含的功能2.了解扫描探针显微镜的实验条件3.掌握扫描探针显微镜的成像原理及成像条件4.掌握扫描探针显微镜的样品前处理5.学会分析扫描探针显微镜的数据结果二、扫描探针显微镜的基本结构和工作原理1.扫描探针显微镜的基本结构扫描探针显微镜大体由探针、激光光路,扫描头、反馈与扫描控制电路,与数据采集和显示系统组成。
⑴探针:探针是扫描探针显微镜中探测样品表面信息的一个探头,其末端半径非常小。
扫描探针显微镜为一个有弹性很好的水平微悬臂支撑的金字塔型晶体针尖,一般在扫描探针工作的时候,针尖末端距离样品表面的距离只有几个埃左右,其与样品之间的相互作用力为范德华作用力,随着距离的变化迅速衰减。
四象限光电位置探测器实际由四个光电探测器组成,每个探测器为一个象限;当激光灯打在四象限位置探测器上,每一个象限将会接收到光信号,并且将一定强度的光信号转换为相应大小的电信号,通过四个象限的光强之差的大小,可探知光斑中心的位置,其中上两个象限(A 和B )与下两个象限(C 和D )的相对光强差(DIF 值)的大小代表了光斑在垂直方向上偏离中心的偏离量。
表示了悬臂的垂直弯曲量,左象限(B 和C )与右象限(A 和D )相对光强差(FFM 值)代表光斑水平偏离中心的偏离量,表示悬臂的横向扭曲量。
其探测针尖悬臂形变的原理为:整个激光光路系统是一个光杠杆放大器,当针尖与样品间的距离边小时,其相互作用力变大,导致针尖悬臂产生微小的形变。
针尖的微小形变导致了由针尖反射到检测器(四象限探测器)的激光光斑中心发生了偏移,由于整个光路的长度是针尖悬臂长度的几百到上千倍,所以整个光路将针尖微小的形变放大了上千倍,所以整个光路将针尖微小的形变放大了上千倍,达到了微米级四象限探测器可以将光斑中心离距离探测器中心的距离线性的 B A C D转化成电压,并且这种微米级的光斑移动可以被四象限检测器轻易检测到。