采用四象限探测器的智能跟踪定位算法
- 格式:pdf
- 大小:464.41 KB
- 文档页数:6
基于四象限探测的激光跟踪系统的设计与实现刘思鸣;何宁;邓德迎【摘要】为提高激光目标系统跟踪能力,提出了一种基于四象限探测的激光跟踪系统.采用四象限探测器完成光斑位置检测与目标信息接收,分析传感器光照位置的输出电流误差变化与光斑偏离光敏面中心坐标对应关系,感知和判断目标方位及运动方向,通过伺服系统的闭环控制方法,实现激光快速跟踪,利用上位机对被跟踪目标的方位信息进行图形监测.实验测试表明,采用四象限光电检测构建的激光目标伺服跟踪系统,能快速搜寻锁定目标,并实施激光指向干扰,在目标位置±20°移动变化时,系统跟踪误差约为0.1%,跟踪速度达到22.6°/s,实验结果为激光跟踪的实际应用提供一定参考价值.【期刊名称】《桂林电子科技大学学报》【年(卷),期】2019(039)001【总页数】5页(P7-11)【关键词】光电探测;位置传感;激光跟踪;伺服控制【作者】刘思鸣;何宁;邓德迎【作者单位】桂林电子科技大学信息与通信学院,广西桂林 541004;桂林电子科技大学信息与通信学院,广西桂林 541004;桂林电子科技大学信息与通信学院,广西桂林 541004;桂林航天工业学院广西高校无人机遥测重点实验室,广西桂林541004【正文语种】中文【中图分类】TN249激光跟踪具有高精度、无导轨、大范围、实时动态等优点,它集计算技术、电子技术、精密机械、控制技术于一体,在激光制导领域有着广泛应用[1]。
激光跟踪是实现激光精确制导的基础,经过四十多年的快速发展,激光制导技术和各种激光制导武器已成为高科技的现代和未来战争克敌制胜的重要手段,其中激光制导武器系统具有制导精度高、抗干扰能力强、结构简单、成本低等优势,因而各军事大国都竞相开展研制[2]。
针对激光跟踪系统快速对准能力问题,应用位置传感器完成光斑位置检测与信息接收,通过平衡状态误差分析,采用伺服系统控制实现激光目标的快速跟踪,经实验测试,系统能获取跟踪目标的方位信息,并利用干扰激光对跟踪目标实现锁定指向,为系统应用研究奠定基础。
四象限探测器定位精度的分析与仿真宋哲宇;付芸;范新坤;吴凯【摘要】In order to study the tracking accuracy of four-quadrant(QD)detectors in space laser communication sys-tems and the effects of spot characteristics and external environment on detectors,at first,the principle of four-quad-rant detector flare detection is deduced through the theory,the effects of facula size,facula centroid position,back-ground light,facula energy distribution,dead-area and the SNR are simulated and analyzed. The results show that the sensitivity of the position detection is reduced with the increase of the facular size. The facula energy distribution,back-ground light and dead-area will have an effect on the detection accuracy of the spot position;and the improvement of the signal-to-noise ratio can improve the position detection accuracy.%为了研究影响四象限探测器(QD)在空间激光通信系统中的跟踪精度,以及光斑特性和外部环境对探测器的影响.首先理论推导了四象限探测器光斑检测的原理,然后对光斑半径、光斑位置、背景光、光斑能量分布、死区、系统信噪比等因素进行了仿真分析.研究结果表明,光斑半径的增加会降低四象限探测器的位置探测灵敏度.光斑能量分布、背景光和死区会对光斑位置检测精度产生影响,系统信噪比的提高可以提高位置检测精度.【期刊名称】《长春理工大学学报(自然科学版)》【年(卷),期】2018(041)002【总页数】4页(P41-44)【关键词】背景光;光通信;建模;仿真;信噪比【作者】宋哲宇;付芸;范新坤;吴凯【作者单位】长春理工大学光电工程学院,长春130022;长春理工大学光电工程学院,长春130022;长春理工大学光电工程学院,长春130022;长春理工大学光电工程学院,长春130022【正文语种】中文【中图分类】TN929.1四象限探测器(QD)具有响应快、动态范围宽、灵敏度高、体积小等特点,广泛应用在光电跟踪领域[1]。
基于四象限探测器的光斑中心高精度定位算法郭小康;张彦梅;贺仕杰【摘要】In order to improve the detection accuracy of the four-quadrant detector for laser spot center location and simplify the existing algorithm,the two-section polynomial fitting method was proposed.When the spot energy distribution is Gaussian distribution model,the processing of data can be simplified according to the symmetry of the fourquadrant detector.And then the fitting range was divided into two sections for polynomial fitting.Meanwhile,the algorithm was optimized because the fitting error is bigger on the sides of the fitting range.The simulation results show that when the highest degree of polynomial is four,the fitting error is only 10-5mm orders of magnitude in the range near the origin and 10-4mm orders of magnitude in the range away from the origin.At last,the experiment proves the feasibility of the proposed algorithm.%为了提高四象限探测器检测光斑中心位置的精度,降低现有算法的复杂度,提出了二段式多项式拟合算法.在光斑能量分布服从高斯分布模型的条件下,利用四象限探测器的对称性,简化数据的处理量,将拟合区间合理分为两段进行多项式拟合.同时,针对在拟合区间两端的拟合误差较大的现象进行了优化.仿真分析结果表明,当最高多项式次数为四次时,在原点附近区间,拟合误差仅为1O-5mm数量级;在远离原点区间,拟合误差为10-4mm数量级.最后通过实验验证,证明了算法的可行性.【期刊名称】《激光与红外》【年(卷),期】2017(047)011【总页数】5页(P1353-1357)【关键词】四象限探测器;光斑中心;多项式拟合;检测精度【作者】郭小康;张彦梅;贺仕杰【作者单位】北京理工大学信息与电子学院,北京100081;北京理工大学信息与电子学院,北京100081;北京理工大学信息与电子学院,北京100081【正文语种】中文【中图分类】TN249四象限探测器是一种常见的位置测量器件,由于其结构简单,具有较高的量子效率和灵敏度,广泛应用于目标定位、跟踪、自由空间光通信等领域[1-3]。
四象限探测器在太阳能电池板自动跟踪系统中的应用摘要:采用四象限探测器作为前端探测单元,介绍了利用光电技术、电子技术、自动控制技术以及精密的步进系统实现了太阳能板自动跟踪瞄准系统中的四象限探测器的应用设计。
Abstract:Adapt the four quadrant detector as the front detector .Introduced the steeping system based on optoelectronic technology, electronic technology, automatic control technology .Realized the designation of the automatic tracking system of solar panels.目录第一章应用背景 (3)第二章名词解释 (3)2.1 四象限探测器 (3)2.2 步进电机 (5)第三章系统的工作原理 (5)3.1 系统工作过程 (5)3.2 传感器工作原理 (6)3.3 探测器放大器基本原理图 (8)第四章系统的电路设计 (9)第五章系统控制程序设计 (10)第六章问题和缺陷 (11)第七章结束语 (12)一、四象限探测器在太阳能电池板自动跟踪系统中的应用背景:太阳能热发电和太阳能光伏发电是目前利用太阳能发电的两种主要形式。
光热是通过聚光加热介质, 推动燃气轮机做功发电。
而光伏发电则通过太阳光照射光电池板将光能直接转化为电能。
由于太阳能辐射到地球表面的能量密度比较低, 无论是对于太阳能光伏发电还是太阳能热发电, 能否经济高效利用太阳能的关键在于太阳聚光和跟踪水平的优劣。
实验证明在相同条件下, 极轴式太阳能自动跟踪发电的发电量要比固定发电(用太阳能电池板固定朝南安装的方式对太阳能进行采集)提高40% 左右。
而采用聚光技术对太阳跟踪又提出了更高的要求.目前主要的跟踪方式是根据地球自转以及GPS进行粗调节,利用光电传感器设计的系统进行精确调节跟踪,本文主要讲述四象限探测器在太阳能电池板自动跟踪系统中的应用。
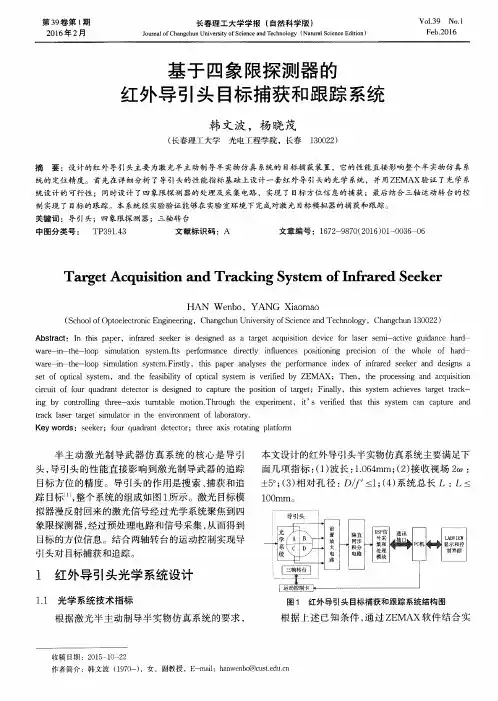
基于四象限探测器的红外导引头目标捕获和跟踪系统韩文波;杨晓茂【期刊名称】《长春理工大学学报(自然科学版)》【年(卷),期】2016(000)001【摘要】In this paper, infrared seeker is designed as a target acquisition device for laser semi-active guidance hard-ware-in-the-loop simulation system.Its performance directly influences positioning precision of the whole of hard-ware-in-the-loop simulation system.Firstly, this paper analyses the performance index of infrared seeker and designs a set of optical system,and the feasibility of optical system is verified by ZEMAX;Then,the processing and acquisition circuit of four quadrant detector is designed to capture the position of target;Finally,this system achieves target track-ing by controlling three-axis turntablemotion.Through the experiment, it’s verified that this syste m can capture and track laser target simulator in the environment of laboratory.%设计的红外导引头主要为激光半主动制导半实物仿真系统的目标捕获装置,它的性能直接影响整个半实物仿真系统的定位精度。
光电探测原理实验报告南邮摘要:采用四象限探测器作为光电定向实验,学习四象限探测器的工作原理和特性,同时掌握四象限探测器定向的工作方法。
实验中,四象限探测器的四个限区验证了具有完全一样的光学特性,同时四象限的定向具有较良好的线性关系。
关键词:光电定向四象限探测器1、开场白随着光电技术的发展,光电探测的应用也越来越广泛,其中光电定向作为光电子检测技术的重要组成部分,是指用光学系统来测定目标的方位,在实际应用中具有精度高、价格低、便于自动控制和操作方便的特点,因此在光电准直、光电自动跟踪、光电制导和光电测距等各个技术领域得到了广泛的应用。
光电定向方式有扫描式、调制盘式和四象限式,前两种用于连续信号工作方式,后一种用于脉冲信号工作方式。
,由于四象限光电探测器能够探测光斑中心在四象限工作平面的位置,因此在激光准直、激光通信、激光制导等领域得到了广泛的应用[1]. 本光电定向实验装置采用激光器作为光源,四象限探测器作为光电探测接收器,采用目前应用最广泛的`一种光电定向方式现直观,快速定位跟踪目标方位。
定向原理由两种方式完成:1、硬件模拟定向,通过模拟电路进行坐标运算,运算结果通过数字表头进行显示,从而显示出定向坐标;2、软件数字定向,通过AD转换电路对四个象限的输出数据进行采集处理,经过单片机运算处理,将数据送至电脑,由上位机软件实时显示定向结果。
本实验系统就是根据光学雷达和光学制导的原理而设计的,利用其光电系统可以轻易、间接地测定目标的方向。
使用650nm激光器搞光源,用四象限探测器表明光源方向和强度。
通过实验,可以掌控四象限光电探测器原理,并观测至红外红外线电磁辐射至四象限探测器上的边线和强度变化。
并利用实验仪展开设计性实验等内容,将光学定向应用领域至各领域中[2]。
2、实验原理2.1、系统了解光电定向是指用光学系统来测定目标的方位,在实际应用中具有精度高、价格低、便于自动控制和操作方便的特点,因此在光电准直、光电自动跟踪、光电制导和光电测距等各个技术领域获得了广为的应用领域。
科学技术创新2020.28基于四象限的光斑位置探测系统设计龚元霞刘福华许孝敏刘杰(西京学院理学院,陕西西安710123)1位置探测器介绍本文主要研究的是运动光斑的位置探测,现有的运动光斑的探测器有很多种,主要有电荷耦合器件、位置敏感器件以及四象限探测器。
本文选择的四象限探测器,探测系统的核心器件进行研究。
1.1探测器的选择四象限探测器是将四个性能完全相同的光电探测器按照直角坐标系的方式排列,利用光生伏特效应将光信号转换为电信号的器件。
光照射到探测器上,探测器的光敏面会形成四个单独的区域,由于光斑占用每个区域的面积不同,从而换算出光斑占用光敏面四个区域的光电压不同,来解算光斑实际位置。
本文选择的四象限探测器如图1,具体尺寸为30mm (长)X30mm (宽)X15mm (厚),感光口径为10mm ,入光口上带螺纹,内螺纹大小为M12。
图1四象限探测器探测器的下侧有M4的螺丝,长度约为6mm ,用此连接支杆可以固定整个探测器。
末端接头采用的是标准的6针PS2接头,如图2。
图2探测器末端接头选用的四象限探测器主要性能参数:根据本系统所应用到的环境以及硬件的要求,四象限探测器的主要性能参数设计如表1。
表1四象限探测器性能参数1.2四象限探测器工作原理图3探测原理当光照射四象限探测器的光敏面上后,光斑与探测器光敏面的分布如图在探测器平面上的分布如图3所示,因探测器有四个像元,四个像元是独立的,光斑因为离四个像元的远近不同,占用的每个像元的面积也有所不同,这样四个像元因为光电效应产生的电压也有所不同,根据这些电压差别可换算出光斑在探测器上的相对位置。
1.3探测算法的选择根据本文四象限探测器的探测原理,电压与光斑位置的解算关系如下:(1)(2)本文选择比较简单的加减定位算法对光斑位置进行计算摘要:随着各种探测技术的蓬勃发展,光斑位置探测在工业精密检测以及导弹制导等领域受到极大的欢迎。
通过比较多种探测器的性能及特点,将选择一种象限探测器作为本文光斑探测系统的核心探测器件。