四象限探测器定位精度的分析与仿真
- 格式:pdf
- 大小:1.57 MB
- 文档页数:4
采用四象限探测器的智能跟踪定位算法司栋森;李增智;王晓旭【期刊名称】《西安交通大学学报》【年(卷),期】2012(046)004【摘要】为了提高跟踪定位系统的跟踪精度与响应速度,提出了一种增益可调的快速跟踪定位(GAFT)算法,以实现对目标的快速定位及在信号较弱时的精确定位,该算法首先根据目标在四象限探测器上光斑成像的大小、位置与输出信号间的关系,确定光斑在探测器上的线性变化区间,并在此区间上得到光斑移动与信号变化的对应关系,再实时采集光斑在4个象限上的信号之和,作为目标光斑信号强度,然后计算光斑信号强度的变化率,采用自适应学习的方法得到信号强度的变化趋势,根据该趋势对信号增益进行动态调整,从而提高信号的分辨率和跟踪精度.实验数据表明,GAFT 算法在线性工作区间中通过改变光斑半径及调整光斑的信号强度等措施,可以将跟踪精度提高到0.049 7mm.【总页数】6页(P13-17,99)【作者】司栋森;李增智;王晓旭【作者单位】西安交通大学电子与信息工程学院,710049,西安;西安电子科技大学计算机学院,710071,西安;西安交通大学电子与信息工程学院,710049,西安;西安电子科技大学计算机学院,710071,西安【正文语种】中文【中图分类】TP211.6【相关文献】1.四象限探测器光斑中心定位算法研究 [J], 陈梦苇;杨应平;贾信庭;冷芬2.采用四象限探测器的激光跟踪系统设计 [J], 王选钢;王仕明;陈丹丹;赵建宏3.基于四象限探测器的光斑中心高精度定位算法 [J], 郭小康;张彦梅;贺仕杰4.采用四象限探测器的光斑中心定位算法 [J], 周子云;高云国;邵帅;李一芒5.基于灵敏度补偿的四象限探测器定位算法的研究 [J], 曹文涛;范光照因版权原因,仅展示原文概要,查看原文内容请购买。
四象限脉冲整流器的一种控制方法与仿真No.O1.2011北京电力高等专科学校BeijingElectricPowerCollege电子,通信与自动控制固四象限脉冲整流器的一种控制方法与仿真朱闻名贺升学(西南交通大学电气工程学院,四川成都610031)摘要:本文主要简述两重四象限整流技术的特点,主电路拓扑结构及数学模型.通过采用瞬态电流控制方法来减少整流器网侧谐波量提高交流侧电压电流的功率因数,输出稳定的直流电压,并通过仿真进行验证关键词:两重四象限整流器;瞬态电流控制;仿真中图分类号:TM92'文献标识码:A一,两重四象限整流器的工作原理与数学模型两重四象限整流技术就是将两个两电平四象限整流器并联起来共同给直流负载供电的技术.两重四象限整流技术是2个4QC并联为直流负载供电,中间电容部分存储能量,输出平滑的直流电压,当其中一个整流器出现故障时,另一个仍可以继续工作,这大大提高了系统直流供电质量与可靠性.'(一)四象限整流器的结构与原理图1为四象限整流器电路图….其中LN与RN为折合到二次侧的牵引变压器的漏感和电阻,L与C为二次滤波回路,cd为支撑电容.通过对开关进行导通与关断对直流侧电压进行调制,这样在变流器的输入端生成一个与电网电压同步的脉宽调制波,由四象限整流器等效图,可以得出等效的平衡式:N:jmLNINRNINUs当一定,的幅值和相位由的幅值及其与的相位差来决定,脉冲整流器可以工作在牵引与再生制动两种工况.由公式看出:只要控制了的幅值和相位,就控制了的幅值和相位.二,整流器的控制方法对于四象限电压型整流器,控制方法有间接电流控制和直接电流控制.间接电流控制没有电流反馈回路,结构虽然简单,但是不能很好的使电流跟踪电压,效果不是很理想.直接电流控制应用比较多,尤其瞬态电流控制方法目前广泛应用在动车组变流器,效果优势明显,控制结构相对简单.(一)瞬态电流控制的原理瞬态电流控制公式如下:,M=(乙一Ua)+I/T一I:iJd}UNIN=1+I(,)=o'._(,v风sinta+oosca)sinca-6Xt)其中K1和T为调节器参数;K为比例放大系数;Ia,u一分别为中间直流环节电流和中间直流环节电压;u(t),U为二次侧电压瞬时值和有效值;U为中间直流环节电压的给定值.(二)瞬态电流控制框图图2为瞬态电流的控制框图,通过比较运算后最终输出参考电压,并与三角载波比较生成P_lI『M信号驱动开关.8图2为瞬态电流控制框图三,仿真分析(一)仿真模型根据整流结构搭建MATLAB/SIMULINK仿真模型,模型包括变压器二术.文章编号:1009-0118(2011)一O1—0008一O1次侧漏感和电阻,单相两点平整流模块,滤波电路,支撑电容,阻性负载及瞬态电流控制模块.(三)仿真结果分析通过使用瞬态电流控制策略对两重四象限整流器进行仿真,主要对交流侧功率因数,整流器输入电压及直流侧电压和电流等进行仿真分析.直流电压给定值为3000V,交流输入电流为2500V,采用离散方式,两个整流器的控制模块中,采用三角载波,将两载波的相位差调整为90度.l,交流侧电压与电流交济洌电流具有稳定值,且能稳定迅速地跟随电压,保持着高的功率因数. 2,整流器输入端电压输入端电压在短时间内呈现为一系列的正弦脉冲波,且幅值基本稳定,基本符合整流器电压输入要求.3,直流侧电压与电流西3为直流负载电流~一~,图4为直流侧负载电压从图3,图4看出,直流侧电压与电流能迅速稳定,直流侧直流电压给定值为3000V,从图4看出,直流电压值保持在3000V左右,为逆变器与电机提供了稳定的电源.四,结束语本文主要讲述了动车组两重四象限整流器的结构,原理,并通过使用瞬态电流控制法对整流器进行了仿真控制.从仿真结果看对整流器的控制效果比较满意,功率因数接近1,直流侧电压稳定在额定值,是两重四象限整流器一种理想的控制方法.目前,两重四象限整流技术已经用于高速列车变流器中,但是本文将逆变与电机部分理想等效为了电阻负载,与实际的控制效果还有一定的差距,还需要更接近实际的仿真研究.参考文献:f1]李伟,张黎.交一直一交传动系统网侧变流器预测电流控制方法的计算机仿真及实现中国铁道科学,2002,23,(6).f2]邹仁.四象限变流器瞬态电流控制的仿真研究Ⅱ].机车电传动,2003,(6).[31章志兵,张志学.单相三电平整流器控制方法及中点平衡的研究Ⅱ】.机车电传,2008,(4).[4]宋文胜,刘志敏,冯晓云.四象限变流器控制策略研究与仿真Ⅱ】.电力机车与城轨车辆,2007,30,(2].作者简介:朱闻名(1984一),男,汉族,湖南常德人,西南交通大学电气工程学院硕士,电力电子与电力传动专业,研究方向:电力电子变流技..。
光电定向实验报告(最新版)编制人:__________________审核人:__________________审批人:__________________编制单位:__________________编制时间:____年____月____日序言下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!并且,本店铺为大家提供各种类型的实用范文,如报告范文、工作总结、文秘知识、条据书信、行政公文、活动报告、党团范文、其他范文等等,想了解不同范文格式和写法,敬请关注!Download tips: This document is carefully compiled by this shop. I hope that after downloading it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you!In addition, this shop provides you with various types of practical sample essays, such as report sample essays, work summary, secretarial knowledge, article letters, administrative official documents, activity reports, party group sample essays, other sample essays, etc. I want to understand the format and writing of different sample essays. stay tuned!正文内容摘要:采用四象限探测器作为光电定向实验,学习四象限探测器的工作原理和特性,同时掌握四象限探测器定向的工作方法。
四象限系统研究及其控制方法研究随着科技的不断进步,目前我们的社会已经进入了一个高度信息化的时代。
在这个信息时代,各种各样的数字信号不断涌现,其中四象限系统是一种非常重要的数字信号系统。
那么什么是四象限系统呢?四象限系统是一种基于x轴和y轴的坐标系,将信号分为四个象限:第一象限、第二象限、第三象限、第四象限。
它可以将复杂的数字信号表达成一个点的位置,同时提供结构化的分析和控制方法。
由于它能够简化信号处理的复杂性,因此在很多领域都得到了广泛的应用。
对于四象限系统,我们可以从以下几个方面进行研究。
一、四象限系统基础知识的研究在研究四象限系统之前,我们需要掌握基础的数学知识,如复数、欧拉公式和极坐标等。
同时,我们还需要了解关于四象限系统的相关定义和概念,比如角频率、直流增益、相、幅等。
此外,我们还需要学习如何在四象限系统中描述和分析信号。
对于信号的描述,我们需要掌握信号在极坐标下的表示方法;对于信号的分析,我们需要了解如何通过信号的相和幅来分析信号的性质。
二、四象限系统控制方法的研究在研究四象限系统的基础知识后,我们可以进一步深入研究四象限系统的控制方法。
对于四象限系统,我们可以通过调整系统的直流增益、相和幅等参数来控制系统的性质。
例如,我们可以通过调整系统的直流增益来改变系统的放大倍数;通过调整系统的相来改变信号的相位;通过调整系统的幅来改变信号的振幅等。
此外,我们还需要学习如何在四象限系统中进行数字信号处理。
对于数字信号处理,我们需要掌握数字滤波器的设计和实现方法,以及数字控制器的设计和实现方法。
三、四象限系统在实际应用中的研究除了基础知识和控制方法的研究外,我们还需要了解四象限系统在实际应用中的研究。
例如,在通信系统中,我们可以使用四象限系统来处理模拟信号和数字信号的转换;在自动控制系统中,我们可以使用四象限系统来实现数字控制器的设计和实现;在医学图像处理中,我们可以使用四象限系统来对医学图像进行处理和分析等。
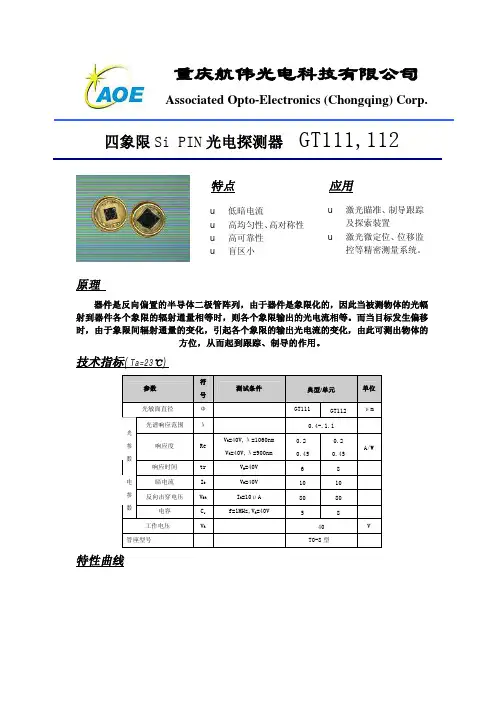
四象限探测器的特性测试赵馨;佟首峰;姜会林【摘要】研究了用四象限探测器检测光斑中心位置时,入射光斑的各种特性和外部环境对象限探测器输出产生的影响.通过理论推导得出了入射椭圆高斯光斑时光斑中心位置与探测器输出的关系公式及检测灵敏度公式;搭建实验系统完成了室内及野外测试实验.实验结果表明,室内环境下探测器具有较高的检测精度与细分能力;在极限灵敏度下通过数字滤波可以使器件具有36细分的能力;测量了象限探测器的电压特性,完成了背景光特性、光斑大小特性、信噪比特性测试实验.野外实验表明,光强闪烁对探测器影响很大,当大气折射率结构常数为10-16时,距离在830 m时器件仅具有7细分能力,距离在12.5 km时基本没有细分能力,已经无法进行光斑检测.【期刊名称】《光学精密工程》【年(卷),期】2010(018)010【总页数】7页(P2164-2170)【关键词】四象限探测器;椭圆高斯光斑;光强闪烁;细分能力【作者】赵馨;佟首峰;姜会林【作者单位】长春理工大学,吉林,长春,130022;长春理工大学,吉林,长春,130022;长春理工大学,吉林,长春,130022【正文语种】中文【中图分类】TP212.14;TN3661 引言四象限探测器因为具有灵敏度和位置分辨率高、光谱范围宽、体积小、响应快、动态范围宽等特点,在光斑位置检测中得到了广泛应用,尤其是在空间光通信中,光波段从800 nm改为1 550 nm,使用四象限探测器对实现通信光与精信光标统一、减小系统体积十分有效;而在1 550 nm波段用于激光光斑位置判定时,由于红外CCD 探测器受限,象限探测器也是理想的选择。
从目前国内外报道的空间光通信系统成功案例和通信系统规划看,象限探测器主要应用在捕获、对准、跟踪(APT)系统精跟踪的光斑检测和提前量伺服系统的光斑检测。
例如,日本NADSA研制的LUCE系统采用象限探测器来完成精跟踪光斑检测及光斑中心计算,其链路为光通信系统的垂直链路[1-2]。
四象限探测器响应曲线
四象限探测器是一种常见的传感器,用于检测物体在平面上的位置。
其响应曲线可以描述探测器对不同位置物体的响应程度。
通常,四象限探测器的响应曲线是一个圆形或椭圆形的图形。
在平面上,探测器的中心表示原点,而探测器的四个象限则表示不同的位置。
响应曲线的中心表示探测器的最敏感区域,即物体所在位置与探测器中心重合时,探测器输出信号最大。
而随着物体位置从探测器中心向外移动,输出信号逐渐减小,直至为零。
响应曲线的形状受到探测器设计和工作原理的影响。
例如,一些探测器使用圆形电极,其响应曲线为圆形;而一些探测器使用条形或扇形电极,其响应曲线则可能是椭圆形或扇形。
此外,探测器的灵敏度和阈值也会影响响应曲线。
灵敏度表示探测器对物体位置变化的敏感程度,灵敏度越高,响应曲线越陡峭;而阈值表示探测器对输出信号的截断点,超过阈值的信号被视为有效的位置。
总的来说,四象限探测器的响应曲线是非线性的,形状和参数受到探测器设计和工作原理的影响。
根据具体应用需求,可以选择适合的探测器,并调整其灵敏度和阈值,以获得满足要求的探测性能。
四象限探测器解算模型误差分析崔瑞青;王景文;李晓梅【摘要】Aiming at the problem of the quadrant photodetector precision, this paper researches the error of different spot model, analyzes the difference of uniform spot and Gauss spot.Simulation is done by utilizing image processing technology and emulator technology.The result of simulation shows that the error always exists no matter what spot model is used and the errors are calculated.It provides important reference for engineering application.%针对四象限探测器的解算精度问题,研究了基于不同光斑模型计算方法存在的误差,重点分析了基于高斯分布的光斑模型和基于均匀分布的光斑模型在解算结果上的差异,利用图像处理技术和建模仿真技术,从理论上得出,无论是哪种光斑模型,本身都存在计算模型误差,通过量化为工程应用提供重要参考.【期刊名称】《激光与红外》【年(卷),期】2011(041)005【总页数】4页(P516-519)【关键词】激光制导;四象限探测器;均匀分布;高斯分布【作者】崔瑞青;王景文;李晓梅【作者单位】中国兵器工业第208研究所,北京102202;中国兵器工业第208研究所,北京102202;中国兵器工业第208研究所,北京102202【正文语种】中文【中图分类】TN249国内外激光制导武器中的目标方位探测系统大量使用了四象限光电探测器,因它具有制导精度高、抗干扰能力强、结构较简单、成本低、使用方便等优点,被广泛应用于实战中,如俄罗斯的“红土地”炮弹、美国的“铜斑蛇”炮弹和“海尔法”导弹都在使用这类器件,可以说激光制导武器在现代战争中发挥了巨大的作用和威力,而其核心器件四象限探测器是其作用和威力发挥的重要保证条件之一。
四象限光电探测器的电路设计方案一、原理四象限光电探测器实际由四个光电探测器构成,每个探测器一个象限,目标光信号经光学系统后在四象限光电探测器上成像,如图1。
一般将四象限光电探测器置于光学系统焦平面上或稍离开焦平面。
当目标成像不在光轴上时,四个象限上探测器输出的光电信号幅度不相同,比较四个光电信号的幅度大小就可以知道目标成像在哪个象限上(也就知道了目标的方位),若在四象限光电探测器前面加上光学调制盘,则还可以求出像点偏离四象限光电探测器中心的距离或θ角来。
图1 目标在四象限光电探测器上成像图2方位探测器原理框图。
信号通过放大和调理后由由A/D转换器(本系统中采用ADS7864)采样转换成数字量送入单片机,由单片机处理后得到目标的方位,并根据实际系统的需要输出方位控制指令。
二、电路设计根据实际系统的需要,A/D转换器用ADS7864,单片机用最常见的89C51。
这里对ADS7864作一介绍。
ADS7864是TI公司生产的12bit高性能模数转换器,片上带2.5V基准电压源,可用作ADS7864的参考电压。
每片ADS7864实际由2个转换速率为500ksps 的ADC构成,每个ADC有3个模拟输入通道,每个通道都有采样保持器,2个ADC组成3对模拟输入端,可同时对其中的1~3对输入信号同时采样保持,然后逐个转换。
由于6个通道可以同时采样,很适合用来转换四象限光电探测器的4路光电信号,剩下2个通道作系统扩展用。
*下面主要介绍电路中的信号采样转换和处理部分。
ADS7864前端调理电路模数转换器的前端调理电路缩放和平移要采样的信号,通过调理后的信号适合A/D转换器的模拟输入要求。
图3是ADS7864一个输入通道的前端调理电路,图3 ADS7864前端调理电路ADS7864模拟输入通道的+IN和-IN的最大电压输入范围为-0.3V~+5.3V(ADS7864 +5V 供电)。
图3的电路中使用了2个运放,A1用作跟随器,用来缓冲ADS7864输出的2.5V基准电压源;A2和四个电阻构成了信号调理网络,适当配置R1~R4电阻可以实现对输入信号Vi的缩放和平移以适合ADS7864模拟通道的输入要求。