深空探测器的自主天文导航原理与方法
- 格式:ppt
- 大小:10.28 MB
- 文档页数:103
航空航天器的自动导航和控制技术航空航天器的自动导航和控制技术在现代航空航天领域起着至关重要的作用。
随着技术的不断进步和创新,自动导航和控制系统为航空航天器的安全、精确和高效操作提供了关键支持。
本文将介绍航空航天器自动导航和控制技术的基本原理、应用和未来发展趋势。
一、自动导航技术的基本原理航空航天器的自动导航技术主要依靠传感器、电子设备和算法来实现。
传感器包括陀螺仪、加速度计、罗盘和全球定位系统(GPS)等,用于获取航空航天器的位置、速度和姿态等信息。
电子设备则包括计算机和控制器,用于处理传感器数据并进行导航决策。
自动导航算法则利用传感器数据和导航模型,通过数学模型和优化方法来实现航空航天器的自动导航。
二、自动导航技术的应用自动导航技术广泛应用于航空和航天领域的各个方面,包括飞行器、卫星和空间飞行器等。
在飞行器领域,自动导航系统能够实现飞机的自动驾驶、自动降落和自动导航等功能,提高了飞行的安全性和精确性。
在卫星领域,自动导航系统能够实现卫星的轨道控制和定位服务,保证卫星的运行和导航准确性。
在空间飞行器领域,自动导航系统能够实现太空探测器的自主导航和位置调整,实现对宇宙空间的探索。
三、自动控制技术的基本原理航空航天器的自动控制技术主要依靠传感器、执行器和控制算法来实现。
传感器用于获取航空航天器的状态和环境信息,执行器用于控制航空航天器的姿态和运动。
控制算法基于系统模型和反馈控制理论,通过计算和调整执行器的信号,以实现航空航天器的自动控制。
四、自动控制技术的应用自动控制技术在航空航天器领域有着广泛的应用。
在飞行器领域,自动控制系统能够实现飞机的飞行姿态控制、航向控制和高度控制,提高了飞行的稳定性和安全性。
在卫星领域,自动控制系统能够实现卫星的轨道控制和姿态控制,保持卫星的定位和运行状态。
在空间飞行器领域,自动控制系统能够实现宇宙飞船的航向控制和位置调整,确保航天器的正确运行和导航。
五、自动导航和控制技术的未来发展趋势随着人工智能和机器学习等技术的发展,航空航天器的自动导航和控制技术也将迎来新的发展机遇。
航天器的自主导航与控制技术在人类探索宇宙的征程中,航天器的自主导航与控制技术扮演着至关重要的角色。
这项技术就像是航天器的“眼睛”和“大脑”,指引着它们在浩瀚的太空中安全、准确地飞行,完成各种复杂的任务。
想象一下,航天器在远离地球的广袤宇宙中飞行,周围是无尽的黑暗和未知。
在这样的环境中,要想实现精确的导航和有效的控制,可不是一件容易的事情。
自主导航技术让航天器能够不依赖于地面的指令,依靠自身携带的设备和算法来确定自己的位置、速度和姿态。
这就好比一个人在没有地图和向导的情况下,凭借自己的能力找到正确的方向。
为了实现自主导航,航天器通常会配备多种传感器。
其中,最常见的包括星光敏感器、惯性测量单元和太阳敏感器等。
星光敏感器就像是航天器的“眼睛”,它能够通过观测恒星的位置来确定航天器的姿态。
惯性测量单元则可以测量航天器的加速度和角速度,从而推算出其速度和位置的变化。
太阳敏感器则利用太阳的位置来辅助确定航天器的姿态。
这些传感器收集到的数据会被传输到航天器的计算机系统中,通过一系列复杂的算法进行处理和融合。
这些算法就像是航天器的“大脑”,能够从大量的数据中提取出有用的信息,并计算出航天器的准确状态。
例如,卡尔曼滤波算法就是一种常用的融合多种传感器数据的方法,它能够有效地降低测量误差,提高导航精度。
除了传感器和算法,航天器的自主导航还需要精确的星历数据。
星历数据就像是一本宇宙的“地图”,记录了天体的位置和运动轨迹。
航天器可以根据这些数据来预测自己的位置和未来的运动方向。
然而,由于宇宙中的天体运动是非常复杂的,星历数据也需要不断地更新和修正。
在自主控制方面,航天器需要能够根据导航系统提供的信息,自主地调整姿态、轨道和推进系统,以实现预定的任务目标。
这就需要先进的控制系统和执行机构。
控制系统就像是航天器的“指挥官”,它根据导航信息和任务要求,制定出控制策略。
执行机构则像是航天器的“手脚”,负责将控制指令转化为实际的动作,例如调整推进器的推力、转动太阳能帆板等。
深海探测器的自主导航技术研究在广袤无垠的深海世界,探索的步伐从未停歇。
深海探测器如同勇敢的冒险者,不断向着未知的领域进发。
而在这充满挑战的深海探索之旅中,自主导航技术无疑是至关重要的关键。
深海环境极为复杂和恶劣,高压、低温、黑暗以及复杂的水流等因素,给深海探测器的导航带来了巨大的困难。
传统的依赖外部信号的导航方式在深海中往往难以奏效,这就使得自主导航技术成为深海探测的核心需求。
自主导航技术的核心在于让探测器能够在没有外界明确指引的情况下,准确地确定自身的位置、姿态和运动方向。
要实现这一目标,需要综合运用多种技术手段。
惯性导航系统是深海探测器自主导航中常用的技术之一。
它基于牛顿运动定律,通过测量加速度和角速度来推算探测器的位置和姿态变化。
然而,惯性导航系统存在误差累积的问题,随着时间的推移,导航精度会逐渐降低。
为了弥补这一不足,通常会结合其他导航手段进行修正。
声学导航是另一种重要的方式。
利用声波在海水中的传播特性,通过测量探测器与已知位置的声学信标之间的距离和角度,来确定探测器的位置。
但声学导航也有其局限性,比如声波传播速度受海水温度、盐度等因素的影响,而且在复杂的海底地形环境中,声波的反射和散射会影响测量精度。
地球物理场导航则是利用深海中的磁场、重力场等地球物理场的特征来进行导航。
这些物理场具有一定的稳定性和独特的分布规律,通过对其进行测量和分析,可以为探测器提供位置信息。
不过,这种导航方式的精度相对较低,通常作为辅助手段。
为了提高深海探测器的自主导航精度,多传感器融合技术逐渐成为研究的热点。
将惯性导航、声学导航、地球物理场导航等多种导航方式的信息进行融合,通过数据处理和算法优化,充分发挥各种导航方式的优势,弥补彼此的不足,从而实现更精确、更可靠的导航。
在自主导航技术的研究中,先进的算法和模型也起着关键作用。
例如,卡尔曼滤波算法能够有效地处理传感器测量数据中的噪声和不确定性,提高导航系统的估计精度。
深海探测器的自主导航技术研究在人类探索海洋的进程中,深海探测器扮演着至关重要的角色。
而自主导航技术则是深海探测器能够在广袤且复杂的深海环境中安全、高效运行的关键。
深海环境具有高压、低温、黑暗等极端条件,这给深海探测器的导航带来了巨大的挑战。
传统的导航方法在深海中往往受到很大的限制,例如,卫星导航信号在水下无法有效传播,惯性导航系统存在累积误差,声学导航则易受多径效应和环境噪声的影响。
因此,发展高效、可靠的自主导航技术成为了深海探测领域的迫切需求。
自主导航技术的核心在于让探测器能够在没有外部依赖的情况下,准确地确定自身的位置、姿态和速度等信息,并规划出合理的路径。
目前,用于深海探测器的自主导航技术主要包括惯性导航、声学导航、地磁导航、视觉导航以及多种导航方式的组合。
惯性导航是深海探测器中应用较为广泛的一种导航方式。
它通过测量加速度和角速度来计算探测器的运动状态。
然而,惯性导航系统的误差会随着时间累积,长时间工作后会导致较大的定位偏差。
为了提高惯性导航的精度,通常会采用惯性传感器的校准和补偿技术,以及与其他导航方式进行组合。
声学导航是利用声波在水中的传播特性来实现导航的一种方法。
常见的声学导航系统有声呐、超短基线定位系统等。
声呐通过发射和接收声波来测量探测器与海底或其他目标的距离和方位,从而确定探测器的位置。
超短基线定位系统则通过测量声波到达不同接收基阵的时间差来计算探测器的位置。
声学导航在深海环境中具有较好的适应性,但受到声波传播速度变化、多径效应和环境噪声的影响,精度有限。
地磁导航是利用地球磁场的特征来进行导航的一种方式。
地球磁场在不同的地理位置具有不同的强度和方向,通过测量地磁场的参数,可以推算出探测器的位置。
地磁导航具有无源、无辐射、不受环境干扰等优点,但精度相对较低,通常作为辅助导航手段。
视觉导航是近年来发展起来的一种新型导航技术。
通过安装在探测器上的摄像头获取周围环境的图像信息,利用图像处理和模式识别算法来识别特征物体或地形,从而确定探测器的位置和姿态。
深海探测器的自主导航技术与应用研究与分析在人类探索海洋的进程中,深海探测器扮演着至关重要的角色。
随着科技的不断进步,深海探测器的自主导航技术也取得了显著的发展,为我们深入了解神秘的深海世界提供了有力的支持。
深海环境极为复杂和恶劣,压力巨大、温度极低、光线微弱,这给深海探测器的导航带来了巨大的挑战。
在这样的环境下,传统的导航方法往往难以奏效,因此,发展先进的自主导航技术成为了必然的选择。
目前,常见的深海探测器自主导航技术主要包括惯性导航、声学导航、地球物理场导航以及组合导航等。
惯性导航是一种不依赖外部信息的自主导航方式,通过测量探测器的加速度和角速度来推算其位置和姿态。
然而,惯性导航存在误差积累的问题,长时间工作后精度会逐渐降低。
声学导航则是利用声波在海水中的传播特性来实现导航。
例如,长基线声学导航系统通过在海底布设多个声学基站,探测器接收基站发射的信号来确定自身位置。
这种导航方式精度较高,但系统复杂,成本昂贵,而且容易受到海洋环境噪声的干扰。
地球物理场导航是基于海洋中地球物理场的特征来进行导航,如地磁场、重力场等。
这种导航方式具有自主性强、隐蔽性好等优点,但地球物理场的测量精度和模型精度对导航效果有较大影响。
为了克服单一导航技术的局限性,组合导航技术应运而生。
将惯性导航与声学导航、地球物理场导航等相结合,可以充分发挥各种导航技术的优势,提高导航系统的精度和可靠性。
深海探测器自主导航技术的应用领域非常广泛。
在海洋科学研究方面,它能够帮助科学家精确地测量海洋物理、化学和生物等参数,深入了解海洋的生态系统和气候变化。
例如,通过自主导航,探测器可以按照预定的轨迹采集不同深度的水样,分析其中的化学成分和微生物群落,为研究海洋的物质循环和生态平衡提供重要的数据。
在资源勘探方面,深海蕴含着丰富的矿产资源和能源,如石油、天然气、锰结核等。
深海探测器的自主导航技术可以使勘探设备准确地到达目标区域,进行高效的资源探测和评估。
基于信息融合的深空探测器的自主导航方法
宁晓琳;房建成
【期刊名称】《中国空间科学技术》
【年(卷),期】2004(024)001
【摘要】天文导航是深空探测器实现自主导航的重要手段之一,其基本原理是基于航天器轨道动力学方程和对天体的观测信息,利用卡尔曼滤波精确估计航天器的位置和速度.但由于天文导航只使用了相对于天体的角度信息,所以定位精度较低.为解决这一问题,文章提出了一种在天文观测信息的基础上,同时利用多普勒频移测量探测器与地面站的相对速度,并利用信息融合将两者有效的结合在一起的导航新方法.计算机仿真结果显示,该方法可以大大提高导航定位的精度.
【总页数】6页(P66-71)
【作者】宁晓琳;房建成
【作者单位】北京航空航天大学宇航学院北京 100083;北京航空航天大学宇航学院北京 100083
【正文语种】中文
【中图分类】V4
【相关文献】
1.基于UKF和信息融合的航天器自主导航方法 [J], 罗楠;许录平;张华
2.基于X射线脉冲星的深空探测器自主导航方案 [J], 乔黎;刘建业;熊智;郑广楼
3.深空探测器光学自主导航方法探讨 [J], 徐欣彤;桑吉章;刘晖
4.基于脉冲星和火星观测的深空探测器自主导航 [J], 刘劲;房建成;宁晓琳;吴谨;康志伟
5.深空探测器小天体交会段自主导航方法研究 [J], 时剑波
因版权原因,仅展示原文概要,查看原文内容请购买。
天文导航的原理和应用pdf1. 引言天文导航是一种利用天体的位置和运动来确定地球或其他天体位置的方法。
天文导航的原理基于天体的固有属性和运行轨迹,通过观测和测量天体的位置和运动,可以确定导航者所处位置的方法。
本文将介绍天文导航的基本原理和其在实际应用中的具体场景。
2. 天文导航的基本原理天文导航的基本原理是利用天体的位置和运动来确定导航者所处位置的方法。
具体而言,天文导航依赖于以下几个关键要素:• 2.1 天体位置测量导航者需要准确地测量天体的位置。
这通常通过使用天文仪器如望远镜进行观测,并结合星表等工具来确定天体的准确位置。
• 2.2 天体运动测量天体的位置随时间变化,因此导航者需要测量天体的运动。
这可以通过观测天体在不同时刻的位置来实现,然后利用数学模型推算天体的运动轨迹。
• 2.3 天体运动模型为了准确地推算天体的位置和运动轨迹,导航者需要建立一定的天体运动模型。
这个模型可以基于天体的物理性质和行星力学原理来构建,并结合天文观测数据进行校准和验证。
• 2.4 导航计算方法最后,导航者需要利用测量到的天体位置和运动信息,结合天体运动模型,进行导航计算。
这个计算过程可以通过数学模型和算法来实现,以确定导航者所处的位置。
3. 天文导航的应用场景天文导航在实际应用中有广泛的应用场景。
以下列举了几个常见的应用场景:• 3.1 航空航天导航天文导航在航空航天领域有着重要的应用。
航空器和宇宙飞船可以通过测量天体的位置和运动来确定自身的位置,从而进行准确的导航和定位。
• 3.2 地理导航天文导航也可以应用于地理导航。
通过观测和测量地球上不同位置的天体,如太阳、北极星等,可以确定观测地点的经纬度等地理信息,从而实现导航和定位。
• 3.3 海上导航在海上航行中,天文导航可以帮助船舶准确地确定自身的位置。
通过测量太阳、月亮和恒星等天体的位置和运动,船舶可以使用天文仪器和导航工具确定自己的经度和纬度。
• 3.4 太空探索天文导航在太空探索中也具有重要的应用。
天文导航的原理及应用1. 引言天文导航是一种利用天体进行导航的方法。
它基于天体的位置、轨道和光学特性来确定航向和位置。
天文导航在航海、航空、航天和地质勘探等领域有着广泛的应用。
2. 天文导航的原理天文导航的原理基于天体的观测和测量。
以下是几种常用的天文导航原理:2.1 天体定位通过观测天空中的星体,可以获得它们的位置和轨道信息。
根据已知星体的位置和轨道,可以计算出观测者所处的位置和航向。
2.2 天体测距利用视差原理和测距方法,可以通过测量天体在不同观测点的位置差异来计算观测者与天体的距离。
借助测距原理,可以确定观测者的位置。
2.3 天体引导天体引导是指利用天体的运动来确定观测者的航向。
参考星体的位置和运动特征,观测者可以通过调整航向,使得参考星体始终保持在某个特定的位置。
2.4 天体光学特性天体的光学特性可以提供导航信息。
例如,太阳的位置和亮度变化可以用于季节和时间的测量,而极光则可以用于确定地理位置。
3. 天文导航的应用天文导航在以下领域有着重要的应用:3.1 航海天文导航在航海中扮演着至关重要的角色。
通过观测太阳、星星、月亮等天体,并结合地平仪和天体测距仪等工具,船舶可以确定自己的位置和航向。
3.2 航空在航空领域,天文导航被广泛应用于仪表飞行。
飞行员可以通过观测星星、月亮和太阳等天体,辅之以无线电导航系统,准确确定飞机的位置和航向。
3.3 航天天文导航在航天探测任务中起着重要的作用。
航天器可以利用天体的引力和光学信息,确定自己的轨道和位置,从而进行精确的航天飞行和控制。
3.4 地质勘探天文导航也被应用于地质勘探中的导航和定位。
通过观测地球上的星体和太阳,地质勘探人员可以确定自己的位置和方向,从而进行地质勘察和地质调查。
4. 结论天文导航作为一种利用天体进行导航的方法,具有广泛的应用前景。
通过观测和测量天体的位置、轨道和光学特性,可以准确地确定观测者的位置和航向。
天文导航在航海、航空、航天和地质勘探等领域都发挥着重要的作用,为人类探索和发展提供了重要的帮助。
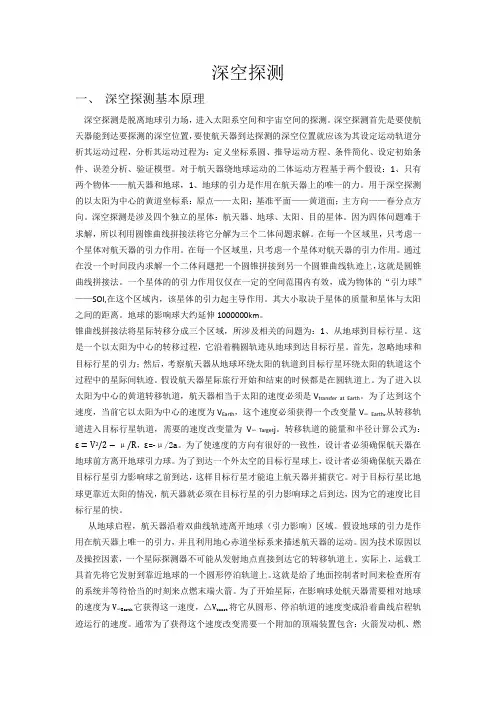
空间探测器的导航与控制技术研究在人类探索宇宙的伟大征程中,空间探测器扮演着至关重要的角色。
它们如同勇敢的使者,奔赴遥远的星球和星系,为我们带回珍贵的信息和数据。
而要确保这些探测器能够准确、高效地完成使命,先进的导航与控制技术是关键。
空间探测器的导航技术,就像是为探测器指引方向的“指南针”。
在茫茫宇宙中,没有明显的地标和参照物,确定探测器的位置和姿态可不是一件容易的事。
目前,常用的导航方法包括天文导航、惯性导航以及卫星导航等。
天文导航是一种古老而有效的方法。
它利用恒星、行星等天体的位置和运动来确定探测器的位置和姿态。
通过观测天体的角度和距离,结合天文知识和数学模型,就能够计算出探测器的位置信息。
这种方法的优点是自主性强,不依赖于外部的信号源,但精度会受到观测设备和天文模型的限制。
惯性导航则依靠测量探测器的加速度和角速度来推算其位置和姿态的变化。
惯性测量单元通常由加速度计和陀螺仪组成,它们能够实时感知探测器的运动状态。
然而,惯性导航存在误差累积的问题,随着时间的推移,误差会逐渐增大,因此需要定期进行修正。
卫星导航在地球上已经得到了广泛的应用,但在空间探测中,由于卫星信号的衰减和遮挡,其使用受到了一定的限制。
不过,在近地轨道和一些特定的任务中,卫星导航仍然可以发挥重要作用,为探测器提供辅助的位置信息。
除了这些传统的导航方法,近年来,一些新兴的导航技术也在不断发展。
例如,视觉导航通过探测器上搭载的相机拍摄周围的天体图像,然后利用图像处理和模式识别技术来确定探测器的位置和姿态。
这种方法具有较高的精度和自主性,但对图像处理算法和计算能力要求较高。
说完导航,我们再来看看空间探测器的控制技术。
控制技术就像是探测器的“驾驶员”,负责指挥探测器按照预定的轨迹和姿态飞行。
姿态控制是控制技术中的一个重要方面。
探测器在太空中需要保持稳定的姿态,以确保各种仪器设备能够正常工作。
姿态控制通常采用动量轮、控制力矩陀螺等装置来实现。
天文导航的原理和应用1. 概述天文导航是一种利用天体观测进行定位导航的方法,利用天体的位置和运动规律来确定地点和方向。
它是一种古老而可靠的导航技术,广泛应用于航海、航空、太空探测等领域。
本文将介绍天文导航的基本原理和实际应用。
2. 天文导航的原理天文导航的原理基于以下几个关键点:2.1 天体位置测定天文导航通过观测天体的位置来确定自身的位置。
天体位置测定的主要方法有:•天体测量角度•天体测量方位•天体测量高度2.2 天体运动规律天体运动规律是天文导航的基础之一。
主要的天体运动规律有:•地球自转•地球公转•天体自身运动2.3 时间测量天文导航需要准确的时间测量来计算天体的位置。
时间测量可以通过摄制时间和其他天文现象的观测来实现。
3. 天文导航的应用天文导航在许多领域都有重要的应用,下面介绍几个典型的应用场景:3.1 航海天文导航是航海中常用的导航方法之一。
航海员通过观测太阳、星星等天体的位置来确定自己的位置和航向,以帮助船只找到正确的航线。
3.2 航空天文导航在航空领域也有重要的应用。
航空导航使用天文数据来辅助飞行员确定航线和飞行方向,提高飞行的安全性和准确性。
3.3 太空探测在太空探测任务中,天文导航也起到了关键作用。
通过观测行星、恒星等天体的位置,太空探测器可以定位自身的位置和确定目标的方向。
3.4 科学研究天文导航不仅可以用于定位导航,还可以为科学研究提供重要的数据。
科学家通过观测天体的位置和运动规律,可以推断出一些天体运动的规律和天文现象的原理。
3.5 文化遗产保护天文导航在文化遗产保护中也有一定的应用。
一些古代建筑和遗址的设计和布局,常常与天文现象有关,通过观测天体位置和运动规律,可以揭示出这些古代文化遗产的特殊意义。
4. 总结天文导航是一种古老而可靠的导航技术,通过观测和计算天体的位置和运动规律,可以确定地点和方向。
天文导航在航海、航空、太空探测等领域有广泛的应用,同时也为科学研究和文化遗产保护提供了重要的数据和方法。
航天深空的原理有哪些
航天深空的原理包括以下几个方面:
1. 火箭推进原理:航天深空探测器通常使用火箭发动机进行推进。
火箭发动机利用反作用力原理,将排放的高速喷流推动火箭向前移动。
2. 加速度控制:为了进入特定轨道或航向,航天器需要控制加速度。
这可以通过引擎喷口的角度、燃料的喷射速度和方向以及飞行器周围的姿态控制机构等方式实现。
3. 慣性導航系統:航天器通常使用惯性导航系统来跟踪自己的位置和速度。
这种系统利用陀螺仪和加速度计等传感器来测量航天器的加速度和角速度,并根据这些数据进行导航和定位。
4. 引力助推:航天器在航天深空中可能利用行星或星球的引力来实现助推。
这种引力助推可以帮助航天器改变轨道或增加速度。
5. 太阳能推进:一些航天深空任务利用太阳能来提供动力。
太阳能板会将太阳辐射转化为电能,然后将其用于推进器。
6. 轨道调整:航天器在深空中需要进行轨道调整来维持正确的航向或进入特定轨道。
这可以通过小推进器、姿态控制机构或重力助推等方式来实现。
7. 防止太空垃圾:航天器在深空中需要注意避免太空垃圾或其他天体的碰撞。
这可以通过追踪和避让系统、航天器自身的防护措施以及地面控制中心的跟踪和指导来实现。