天文导航2
- 格式:ppt
- 大小:9.59 MB
- 文档页数:28
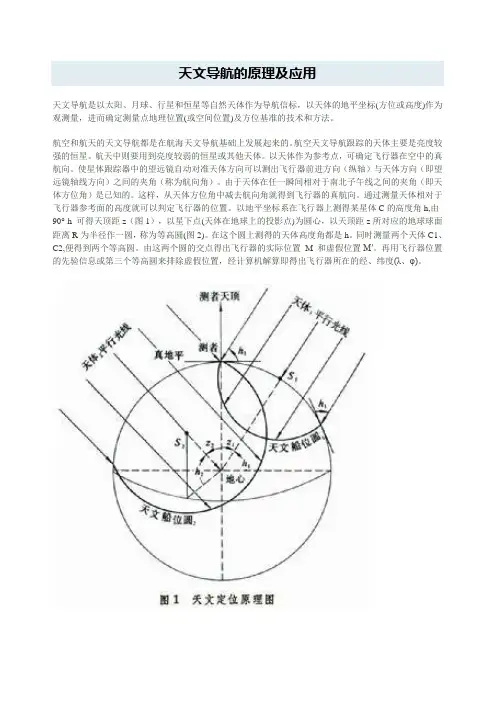
天文导航的原理及应用天文导航是以太阳、月球、行星和恒星等自然天体作为导航信标,以天体的地平坐标(方位或高度)作为观测量,进而确定测量点地理位置(或空间位置)及方位基准的技术和方法。
航空和航天的天文导航都是在航海天文导航基础上发展起来的。
航空天文导航跟踪的天体主要是亮度较强的恒星。
航天中则要用到亮度较弱的恒星或其他天体。
以天体作为参考点,可确定飞行器在空中的真航向。
使星体跟踪器中的望远镜自动对准天体方向可以测出飞行器前进方向(纵轴)与天体方向(即望远镜轴线方向)之间的夹角(称为航向角)。
由于天体在任一瞬间相对于南北子午线之间的夹角(即天体方位角)是已知的。
这样,从天体方位角中减去航向角就得到飞行器的真航向。
通过测量天体相对于飞行器参考面的高度就可以判定飞行器的位置。
以地平坐标系在飞行器上测得某星体C的高度角h,由90°-h 可得天顶距z(图1),以星下点(天体在地球上的投影点)为圆心,以天顶距z所对应的地球球面距离R为半径作一圆,称为等高圆(图2)。
在这个圆上测得的天体高度角都是h。
同时测量两个天体C1、C2,便得到两个等高圆。
由这两个圆的交点得出飞行器的实际位置M 和虚假位置M′。
再用飞行器位置的先验信息或第三个等高圆来排除虚假位置,经计算机解算即得出飞行器所在的经、纬度(λ、φ)。
天文导航的分类按星体的峰值光谱和光谱范围分,天文导航可分为星光导航和射电天文导航。
观测天体的可见光进行导航的叫星光导航,而接收天体辐射的射电信号(不可见光)进行导航的叫射电天文导航。
前者可解决高精度昼夜全球自动化导航定位,后者可克服阴雨等不良天气影响,通过探测射电信号进行全天候天文导航与定位。
根据跟踪的星体数,天文导航分为单星、双星和三星导航。
单星导航由于航向基准误差大而定位精度低,双星导航定位精度高,在选择星对时,两颗星体的方位角差越接近90°,定位精度越高。
三星导航常利用第三颗星的测量来检查前两次测量的可靠性,在航天中,则用来确定航天器在三维空间中的位置。
导航技术及其发展导航技术是指通过各种手段确定自身位置、方向和速度的技术,是现代社会中不可或缺的一部分。
它广泛应用于军事、航空、航海、汽车、手机等领域,极大地提高了人们的生活质量和工作效率。
本文将从导航技术的发展历程、主要技术及其应用前景三个方面进行探讨。
一、导航技术的发展历程1. 古代导航技术在古代,人们主要依靠天文导航、地文导航和经验导航进行定位。
天文导航是通过观测天体位置来确定自身位置的方法,如我国古代的航海家郑和就是利用天文导航技术实现了七次下西洋的壮举。
地文导航则是根据地形、地貌等地理特征来确定位置,如古代丝绸之路上的商队就是利用地文导航技术进行贸易往来。
经验导航则是依靠船员的经验和直觉来判断航向和距离。
2. 近代导航技术随着科学技术的发展,近代导航技术逐渐从经验导航向仪器导航转变。
19世纪末,无线电技术的发明为导航技术的发展提供了新的动力。
1906年,德国人布劳恩首次利用无线电波进行航海导航实验,标志着无线电导航技术的诞生。
随后,各种无线电导航系统如罗兰(Loran)、奥米加(Omega)等相继问世,为航海、航空等领域提供了准确的导航服务。
3. 现代导航技术20世纪70年代,美国开始研发全球定位系统(GPS),并于1994年全面建成。
GPS具有全球覆盖、全天候、高精度等特点,迅速成为现代导航技术的主流。
随后,俄罗斯、欧盟等国家和地区也相继研发了自己的全球导航卫星系统(GLONASS、Galileo等),形成了全球导航卫星系统的竞争格局。
我国自主研发的北斗卫星导航系统(BDS)也于2000年发射成功,并于2020年全面建成,成为全球四大卫星导航系统之一。
二、主要导航技术1. 天文导航天文导航是通过观测天体位置来确定自身位置的方法。
古代的天文导航主要依靠肉眼观测,现代天文导航则利用天文望远镜、星敏感器等设备进行观测。
天文导航具有高精度、不受环境限制等优点,但受天气影响较大。
2. 地文导航地文导航是根据地形、地貌等地理特征来确定位置的方法。


天文导航的原理和应用pdf1. 引言天文导航是一种利用天体的位置和运动来确定地球或其他天体位置的方法。
天文导航的原理基于天体的固有属性和运行轨迹,通过观测和测量天体的位置和运动,可以确定导航者所处位置的方法。
本文将介绍天文导航的基本原理和其在实际应用中的具体场景。
2. 天文导航的基本原理天文导航的基本原理是利用天体的位置和运动来确定导航者所处位置的方法。
具体而言,天文导航依赖于以下几个关键要素:• 2.1 天体位置测量导航者需要准确地测量天体的位置。
这通常通过使用天文仪器如望远镜进行观测,并结合星表等工具来确定天体的准确位置。
• 2.2 天体运动测量天体的位置随时间变化,因此导航者需要测量天体的运动。
这可以通过观测天体在不同时刻的位置来实现,然后利用数学模型推算天体的运动轨迹。
• 2.3 天体运动模型为了准确地推算天体的位置和运动轨迹,导航者需要建立一定的天体运动模型。
这个模型可以基于天体的物理性质和行星力学原理来构建,并结合天文观测数据进行校准和验证。
• 2.4 导航计算方法最后,导航者需要利用测量到的天体位置和运动信息,结合天体运动模型,进行导航计算。
这个计算过程可以通过数学模型和算法来实现,以确定导航者所处的位置。
3. 天文导航的应用场景天文导航在实际应用中有广泛的应用场景。
以下列举了几个常见的应用场景:• 3.1 航空航天导航天文导航在航空航天领域有着重要的应用。
航空器和宇宙飞船可以通过测量天体的位置和运动来确定自身的位置,从而进行准确的导航和定位。
• 3.2 地理导航天文导航也可以应用于地理导航。
通过观测和测量地球上不同位置的天体,如太阳、北极星等,可以确定观测地点的经纬度等地理信息,从而实现导航和定位。
• 3.3 海上导航在海上航行中,天文导航可以帮助船舶准确地确定自身的位置。
通过测量太阳、月亮和恒星等天体的位置和运动,船舶可以使用天文仪器和导航工具确定自己的经度和纬度。
• 3.4 太空探索天文导航在太空探索中也具有重要的应用。
天文导航的原理及应用1. 引言天文导航是一种利用天体进行导航的方法。
它基于天体的位置、轨道和光学特性来确定航向和位置。
天文导航在航海、航空、航天和地质勘探等领域有着广泛的应用。
2. 天文导航的原理天文导航的原理基于天体的观测和测量。
以下是几种常用的天文导航原理:2.1 天体定位通过观测天空中的星体,可以获得它们的位置和轨道信息。
根据已知星体的位置和轨道,可以计算出观测者所处的位置和航向。
2.2 天体测距利用视差原理和测距方法,可以通过测量天体在不同观测点的位置差异来计算观测者与天体的距离。
借助测距原理,可以确定观测者的位置。
2.3 天体引导天体引导是指利用天体的运动来确定观测者的航向。
参考星体的位置和运动特征,观测者可以通过调整航向,使得参考星体始终保持在某个特定的位置。
2.4 天体光学特性天体的光学特性可以提供导航信息。
例如,太阳的位置和亮度变化可以用于季节和时间的测量,而极光则可以用于确定地理位置。
3. 天文导航的应用天文导航在以下领域有着重要的应用:3.1 航海天文导航在航海中扮演着至关重要的角色。
通过观测太阳、星星、月亮等天体,并结合地平仪和天体测距仪等工具,船舶可以确定自己的位置和航向。
3.2 航空在航空领域,天文导航被广泛应用于仪表飞行。
飞行员可以通过观测星星、月亮和太阳等天体,辅之以无线电导航系统,准确确定飞机的位置和航向。
3.3 航天天文导航在航天探测任务中起着重要的作用。
航天器可以利用天体的引力和光学信息,确定自己的轨道和位置,从而进行精确的航天飞行和控制。
3.4 地质勘探天文导航也被应用于地质勘探中的导航和定位。
通过观测地球上的星体和太阳,地质勘探人员可以确定自己的位置和方向,从而进行地质勘察和地质调查。
4. 结论天文导航作为一种利用天体进行导航的方法,具有广泛的应用前景。
通过观测和测量天体的位置、轨道和光学特性,可以准确地确定观测者的位置和航向。
天文导航在航海、航空、航天和地质勘探等领域都发挥着重要的作用,为人类探索和发展提供了重要的帮助。
• 148•针对天文导航数据量大,处理速度要求高等特点,本文介绍了基于国产数字信号处理器FT-C6713/400的硬件设计方案,使用FPGA 及MCU 配合完成接口通信及星敏感器电机控制功能。
经测试,该系统能满足天文导航的需求,实现恒星目标的准确捕获及跟踪。
天文导航以空间位置已知、不可毁灭的自然天体作为导航信标,通过对天体的观测来确定飞行器的位置、航向和姿态等信息的导航技术。
具有隐蔽性好,工作稳定,定位、定向精度高,无累积误差等优点。
为了扩展天文导航定位技术的应用领域,天文导航设备目前正向体积小的嵌入式系统方向发展。
本文介绍了一种基于国产数字信号处理器(D S P )F T-C6713/400的天文导航系统硬件设计方案,DSP 是一种专门针对数字信号进行实时高速解算的特殊处理器,具有极强的处理性能、高度的灵活性和可编程性,同时外围集成了丰富的片上外设,可以方便的实现与外围设备的接口,缩小系统硬件平台的体积。
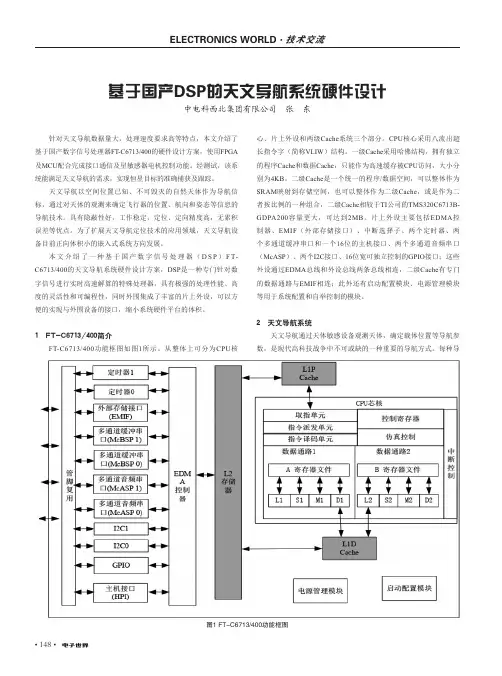
1 FT-C6713/400简介FT-C6713/400功能框图如图1所示。
从整体上可分为CPU 核心、片上外设和两级Cache 系统三个部分。
CPU 核心采用八流出超长指令字(简称VLIW )结构。
一级Cache 采用哈佛结构,拥有独立的程序Cache 和数据Cache ,只能作为高速缓存被CPU 访问,大小分别为4KB 。
二级Cache 是一个统一的程序/数据空间,可以整体作为SRAM 映射到存储空间,也可以整体作为二级Cache ,或是作为二者按比例的一种组合,二级Cache 相较于TI 公司的TMS320C6713B-GDPA200容量更大,可达到2MB 。
片上外设主要包括EDMA 控制器、EMIF (外部存储接口)、中断选择子、两个定时器、两个多通道缓冲串口和一个16位的主机接口、两个多通道音频串口(McASP )、两个I2C 接口、16位宽可独立控制的GPIO 接口;这些外设通过EDMA 总线和外设总线两条总线相连,二级Cache 有专门的数据通路与EMIF 相连;此外还有启动配置模块、电源管理模块等用于系统配置和自举控制的模块。
2019年第十六届中国研究生数学建模竞赛B题天文导航中的星图识别天文导航(Celestial Navigation)是基于天体已知的坐标位置和运动规律,应用观测天体的天文坐标值来确定航行体的空间位置等导航参数。
与其他导航技术相比,天文导航是一种自主式导航,不需要地面设备,不受人工或自然形成的电磁场的干扰,不向外界辐射能量,隐蔽性好,而且定姿、定向、定位精度高,定位误差与时间无关,已被广泛用于卫星、航天飞机、远程弹道导弹等航天器。
天文导航的若干背景知识可参阅附件1。
星敏感器是实现航行体自主姿态测量的核心部件,是通过观测太空中的恒星来实现高精度姿态测量。
恒星是用于天文导航最重要的一类天体。
对天文导航而言,恒星可以看成是位于无穷远处的,近似静止不动的,具有一定光谱特性的理想点光源。
借助天球坐标系,可用赤经与赤纬来描述恒星在某一时刻位置信息(相关定义和概念可参考附件1)。
恒星在天球球面上的投影点称为恒星的位置。
将星空中恒星的相关数据,按不同的需求编制而成的表册,称为星表。
星表是星图识别的主要依据,也是姿态确定的基准。
常用的星表中通常列有恒星的位置、自行、星等(亮度)、颜色和距离等丰富的信息。
对于天文导航而言,感兴趣的信息主要是恒星的位置和星等。
附件2提供了一个简易的星表,提供了部分恒星在天球坐标系下的位置(以赤经、赤纬来标记,单位:角度)和星等信息。
全天自主的星图识别是星敏感器技术中的一项关键技术。
星图识别是将星敏感器当前视场中的恒星(星图)与导航星库中的参考星进行对应匹配,以完成视场中恒星的识别。
星图识别一般包括图像采集及预处理、特征提取、匹配识别等过程。
图像预处理包括去除噪声和星点质心提取。
为简化,本赛题暂不考虑具体的去除噪声和质心提取等问题,认为所讨论的星图图像已经完成了图像预处理。
导航数据库一般包括两部分:导航星表和导航星特征数据库。
导航星表是从基本星表中挑选一定亮度范围的导航星,利用其位置(赤经、赤纬)和亮度信息编制而成的简易星表。
天文导航的原理和应用1. 概述天文导航是一种利用天体观测进行定位导航的方法,利用天体的位置和运动规律来确定地点和方向。
它是一种古老而可靠的导航技术,广泛应用于航海、航空、太空探测等领域。
本文将介绍天文导航的基本原理和实际应用。
2. 天文导航的原理天文导航的原理基于以下几个关键点:2.1 天体位置测定天文导航通过观测天体的位置来确定自身的位置。
天体位置测定的主要方法有:•天体测量角度•天体测量方位•天体测量高度2.2 天体运动规律天体运动规律是天文导航的基础之一。
主要的天体运动规律有:•地球自转•地球公转•天体自身运动2.3 时间测量天文导航需要准确的时间测量来计算天体的位置。
时间测量可以通过摄制时间和其他天文现象的观测来实现。
3. 天文导航的应用天文导航在许多领域都有重要的应用,下面介绍几个典型的应用场景:3.1 航海天文导航是航海中常用的导航方法之一。
航海员通过观测太阳、星星等天体的位置来确定自己的位置和航向,以帮助船只找到正确的航线。
3.2 航空天文导航在航空领域也有重要的应用。
航空导航使用天文数据来辅助飞行员确定航线和飞行方向,提高飞行的安全性和准确性。
3.3 太空探测在太空探测任务中,天文导航也起到了关键作用。
通过观测行星、恒星等天体的位置,太空探测器可以定位自身的位置和确定目标的方向。
3.4 科学研究天文导航不仅可以用于定位导航,还可以为科学研究提供重要的数据。
科学家通过观测天体的位置和运动规律,可以推断出一些天体运动的规律和天文现象的原理。
3.5 文化遗产保护天文导航在文化遗产保护中也有一定的应用。
一些古代建筑和遗址的设计和布局,常常与天文现象有关,通过观测天体位置和运动规律,可以揭示出这些古代文化遗产的特殊意义。
4. 总结天文导航是一种古老而可靠的导航技术,通过观测和计算天体的位置和运动规律,可以确定地点和方向。
天文导航在航海、航空、太空探测等领域有广泛的应用,同时也为科学研究和文化遗产保护提供了重要的数据和方法。
Star Walk 2说明书版本号:2.9.0.195Star Walk™2是面向业余爱好者,专业人士和渴望学习的孩子的观星应用程序。
该应用程序使用户可以识别约25万个天体,并对其进行了解,观看月相,流星雨,查看每天的日落和日出时间,仰角和每天的日照时间以及所有主要行星的数据。
使用Star Walk™,您可以看到以下物体/事件:•星星和星座•太阳系物体(行星,太阳,月亮,矮行星,小行星,彗星)•深空(星云,星系,星团)•卫星•流星雨,春分,交替,满月/新月等。
主要功能:1:恒星实时监视:跟随用户的移动显示现实中看到的天空。
2:增强现实技术:允许用户像使用数字罗盘一样在任何设备上指向和显示天空。
3:光谱栏:可以查看不同光谱的夜空。
4:时间机器:将对恒星观看的控制扩展到过去和将来。
5:搜索:使您可以搜索您感兴趣的任何行星,星座,复杂天体,卫星或恒星,并在天空中看到它。
6:月相:显示选定时段的月相。
使用前先打开手机或Pad的定位功能开始界面1:指南针:实时显示方位2:时间机器:正常水平握持手机时打开软件显示的是时间机器图标。
如果此时手机有对准天空方向动作的话,时间机器图标会显示为照相取景图标,打开相机取景图标,会实时显示此时此刻此方位应出现的星空天体,用户可以对准实际星空一一匹配识别出天体。
如果开机就是相机图标的话,可以在软件界面没有星星的地方随便点一下,相机图标就会变成时间机器图标。
点选时间机器图标会弹出时间刻度,,时间刻度最小可以调节到分,最大可以调节到年。
同时,软件正中右边栏会出现调节标尺图标。
选择时间刻度后,点选调节标尺,同时通过上滑和下拉标尺可以实现星空天体的回溯和预测。
(注意:此时整个界面必须没有星星被选中,如果不小心点中某颗星星,上滑或下拉时间标尺,此时随着时间上的变化,软件界面就是以这个星星为中心进行时间推演的。
这一点一定要注意。
如果是这种情况,软件界面最下面中间会显示此星星的名称。
通过点选软件界面空白处可以取消点选)上图是北极星被点选中的情形,星星被点选择后,此星星周围会出现十字星标,同时右下角会出现星星名称。
船用天文导航设备的故障诊断与维修技巧分享船用天文导航设备是航海过程中不可或缺的重要装备之一。
准确的导航是确保船舶安全航行的关键,而天文导航设备在没有其他定位工具的情况下提供了仪器瞄准天体来确定船舶位置的方法。
然而,就像其他设备一样,船用天文导航设备也可能会出现故障。
本文将分享一些常见的船用天文导航设备故障和相应的诊断与维修技巧,帮助航海人员更好地应对这些问题。
1. 设备无法启动或断电若船用天文导航设备无法启动或突然断电,首先需要检查电源供应是否正常。
确保电源线与接口连接牢固且电源插座供电正常。
如果电源供应正常,但设备仍无法启动,可能是设备内部电路出现故障。
这时,建议联系专业的维修人员进行检修。
2. 导航数据不准确或无法显示若船用天文导航设备显示的导航数据不准确或无法正常显示,可能是设备的内部程序或传感器出现问题。
首先,尝试重新启动设备,以消除可能的临时故障。
如果问题仍然存在,可以检查设备的传感器是否受到干扰或损坏。
同时,确保设备的固件和软件是最新版本,以避免由于更新问题导致的故障。
如果问题仍然无法解决,建议寻求专业维修人员的帮助。
3. 天体定位困难船用天文导航设备的关键功能是通过瞄准天体来确定船舶的位置。
如果发现天体定位困难,首先检查设备是否正确安装和校准。
确保设备的底座和支架处于稳固的状态,避免外部干扰干扰导致的误差。
此外,检查设备的透镜和望远镜是否受到损坏或污染,以保证观测的准确性。
若问题依然存在,可能是设备内部传感器或计算机出现故障,需要寻求专业人士的帮助。
4. 设备摆动或晃动船舶在海上航行时,常常面临波浪和风力的作用,这可能导致船用天文导航设备发生摆动或晃动。
这种情况下,可以通过增加设备的稳定性来减少晃动。
将设备安装在坚固的支架上,并使用稳定的固定装置,例如螺栓或夹子。
另外,还可以使用减震垫或减震器来吸收波浪和风力造成的冲击。
如果问题仍然存在,建议寻求专业的维修帮助以确保设备的正常运行。