深空探测器的自主天文导航原理与方法PPT课件
- 格式:ppt
- 大小:8.92 MB
- 文档页数:105
深空探测器的导航与位置定位在现代科技的快速发展下,人类不断探索更远、更广阔的空间。
深空探测器作为人类进一步探索的重要工具,其导航与位置定位技术成为实现任务目标的关键。
本文将从导航原理、位置定位方法和应用前景等方面探讨深空探测器的导航与位置定位。
深空探测器面临的首要挑战是在无太阳系参照物的情况下,准确地导航和定位。
因此,为了克服这一困难,研究人员利用星空的几何关系和信号传输延迟等原理进行导航定位。
首先,深空探测器利用恒星导航,即通过观测恒星位置的变化来确定自身位置。
根据已知的恒星位置和星历数据,探测器可以通过测量恒星的方位角和高度角,计算自身的方位和高度。
然而,恒星导航在面对星系外的探测任务时存在一定的局限性,因为恒星的位置和运动存在微小的不确定性。
其次,深空探测器还可以利用射电信号的传输延迟进行导航定位。
这是通过测量控制站发出的射电信号从发射到接收的时间来计算探测器离地球的距离,从而确定其位置。
这种方法的优势是可以实时更新位置信息,同时也可以较好地适应星际环境的不确定性。
除了上述方法之外,深空探测器还可利用交会对接技术进行导航和位置定位。
这种方法需要至少两个探测器在空间中同时进行观测,并通过测量它们之间的距离、速度和角度等参数,计算出它们的相对位置和航向角。
交会对接技术在多探测器合作任务中起到关键作用,提高了任务的精确性和可靠性。
尽管深空探测器的导航与位置定位技术已经取得了重要进展,但仍然面临一些挑战和限制。
首先,星系外探测任务中,恒星导航方法的精度有限,无法满足高精度要求。
其次,在星系外环境中,射电信号传输受到星际介质的干扰,使得测量不准确。
此外,交会对接技术需要多个探测器同时运行,增加了任务的复杂性和成本。
然而,随着技术的不断进步,深空探测器的导航与位置定位技术有着广阔的应用前景。
例如,它可以应用于行星探测,通过准确的导航和位置定位,在行星表面进行探测和采样。
此外,导航与位置定位技术也可以应用于星际飞行器,实现星际旅行和外星探索的目标。

天文导航的原理及应用天文导航是以太阳、月球、行星和恒星等自然天体作为导航信标,以天体的地平坐标(方位或高度)作为观测量,进而确定测量点地理位置(或空间位置)及方位基准的技术和方法。
航空和航天的天文导航都是在航海天文导航基础上发展起来的。
航空天文导航跟踪的天体主要是亮度较强的恒星。
航天中则要用到亮度较弱的恒星或其他天体。
以天体作为参考点,可确定飞行器在空中的真航向。
使星体跟踪器中的望远镜自动对准天体方向可以测出飞行器前进方向(纵轴)与天体方向(即望远镜轴线方向)之间的夹角(称为航向角)。
由于天体在任一瞬间相对于南北子午线之间的夹角(即天体方位角)是已知的。
这样,从天体方位角中减去航向角就得到飞行器的真航向。
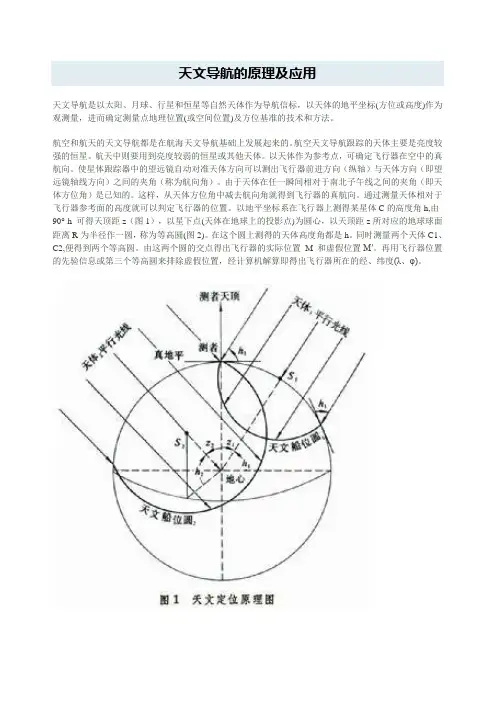
通过测量天体相对于飞行器参考面的高度就可以判定飞行器的位置。
以地平坐标系在飞行器上测得某星体C的高度角h,由90°-h 可得天顶距z(图1),以星下点(天体在地球上的投影点)为圆心,以天顶距z所对应的地球球面距离R为半径作一圆,称为等高圆(图2)。
在这个圆上测得的天体高度角都是h。
同时测量两个天体C1、C2,便得到两个等高圆。
由这两个圆的交点得出飞行器的实际位置M 和虚假位置M′。
再用飞行器位置的先验信息或第三个等高圆来排除虚假位置,经计算机解算即得出飞行器所在的经、纬度(λ、φ)。
天文导航的分类按星体的峰值光谱和光谱范围分,天文导航可分为星光导航和射电天文导航。
观测天体的可见光进行导航的叫星光导航,而接收天体辐射的射电信号(不可见光)进行导航的叫射电天文导航。
前者可解决高精度昼夜全球自动化导航定位,后者可克服阴雨等不良天气影响,通过探测射电信号进行全天候天文导航与定位。
根据跟踪的星体数,天文导航分为单星、双星和三星导航。
单星导航由于航向基准误差大而定位精度低,双星导航定位精度高,在选择星对时,两颗星体的方位角差越接近90°,定位精度越高。
三星导航常利用第三颗星的测量来检查前两次测量的可靠性,在航天中,则用来确定航天器在三维空间中的位置。

天文导航的原理及应用天文导航是以太阳、月球、行星和恒星等自然天体作为导航信标,以天体的地平坐标(方位或高度)作为观测量,进而确定测量点地理位置(或空间位置)及方位基准的技术和方法.航空和航天的天文导航都是在航海天文导航基础上发展起来的。
航空天文导航跟踪的天体主要是亮度较强的恒星。
航天中则要用到亮度较弱的恒星或其他天体.以天体作为参考点,可确定飞行器在空中的真航向。
使星体跟踪器中的望远镜自动对准天体方向可以测出飞行器前进方向(纵轴)与天体方向(即望远镜轴线方向)之间的夹角(称为航向角)。
由于天体在任一瞬间相对于南北子午线之间的夹角(即天体方位角)是已知的.这样,从天体方位角中减去航向角就得到飞行器的真航向。
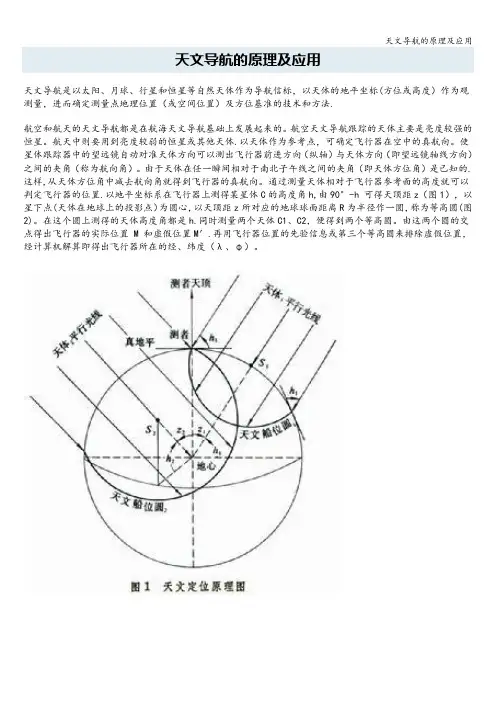
通过测量天体相对于飞行器参考面的高度就可以判定飞行器的位置.以地平坐标系在飞行器上测得某星体C的高度角h,由90°-h 可得天顶距z(图1),以星下点(天体在地球上的投影点)为圆心,以天顶距z所对应的地球球面距离R为半径作一圆,称为等高圆(图2)。
在这个圆上测得的天体高度角都是h.同时测量两个天体C1、C2,便得到两个等高圆。
由这两个圆的交点得出飞行器的实际位置 M 和虚假位置M′.再用飞行器位置的先验信息或第三个等高圆来排除虚假位置,经计算机解算即得出飞行器所在的经、纬度(λ、φ)。
天文导航的分类按星体的峰值光谱和光谱范围分,天文导航可分为星光导航和射电天文导航。
观测天体的可见光进行导航的叫星光导航,而接收天体辐射的射电信号(不可见光)进行导航的叫射电天文导航。
前者可解决高精度昼夜全球自动化导航定位,后者可克服阴雨等不良天气影响,通过探测射电信号进行全天候天文导航与定位.根据跟踪的星体数,天文导航分为单星、双星和三星导航。
单星导航由于航向基准误差大而定位精度低,双星导航定位精度高,在选择星对时,两颗星体的方位角差越接近90°,定位精度越高。
三星导航常利用第三颗星的测量来检查前两次测量的可靠性,在航天中,则用来确定航天器在三维空间中的位置.仪器和系统航空常用的天文导航仪器有星体跟踪器、天文罗盘和六分仪等。