天文导航基础(二)
- 格式:ppt
- 大小:5.86 MB
- 文档页数:55
GPS复习题1.名词解释导航:通过实时地测定运载体在途中行进时的位置和速度,引导运载体沿一定航线经济而安全地到达目的地的技术。
极移:地球自转轴相对于地球体的位置不是固定的,地极点在地球表面上的位置随时间而变化的现象称为极移。
历元:在天文学和卫星定位中,与所获取数据对应的时刻也称历元。
多路径效应: 多路径效应也称多路径误差,即接收机天线除直接收到卫星发射的信号外,还可能收到经天线周围地物一次或多次反射的卫星信号。
整周模糊度:一般是未知的,通常称为整周未知数(整周待定值或整周模糊度)周跳:gps卫星信号中断时,初始整周计数发生变化的现象。
天线相位差:卫星天线几何中心与相位中心的偏差绝对定位;在地球协议坐标系中,确定观测站相对地球质心的位置。
相对定位:在地球协议坐标系中,确定观测站与地面某一参考点之间的相对位置。
整数解:将平差计算所得的整周未知数取为相近的整数,并作为已知数代入原方程,重新解算其它待定参数。
当观测误差和外界误差(或残差)对观测值影响较小时,该方法较有效,一般应用于基线较短的相对定位中。
非整数解:如果外界误差影响较大,求解的整周未知数精度较低(误差影响大于半个波长),将其凑成正数,无助于提高解的精度。
此时,不考虑整周未知数的整数性质,平差计算所得的整周未知数,不再进行凑整和重新计算。
一般用于基线较长相对定位中大地高:某点的大地高是该点到通过该点的参考椭球的法线与参考椭球面的交点间的距离。
大地高也称为椭球高,大地高一般用符号H表示。
正高:某点的正高是该点到通过该点的铅垂线与大地水准面的交点之间的距离,正高用符号Hg表示正常高:常高系统是以似大地水准面为基准的高程系统。
某点的正常高正是该点到通过该点的铅垂线与似大地水准面的交点之间的距离,正常高用Hr表示。
高程异常:似大地水准面到参考椭球面的距离,称为高程异常,记为 。
1.简答题1简述导航技术的发展历程。
推算定位-天文导航-惯性导航-无线电导航2简述导航系统的分类并举例。

天文导航的原理及应用天文导航是以太阳、月球、行星和恒星等自然天体作为导航信标,以天体的地平坐标(方位或高度)作为观测量,进而确定测量点地理位置(或空间位置)及方位基准的技术和方法。
航空和航天的天文导航都是在航海天文导航基础上发展起来的。
航空天文导航跟踪的天体主要是亮度较强的恒星。
航天中则要用到亮度较弱的恒星或其他天体。
以天体作为参考点,可确定飞行器在空中的真航向。
使星体跟踪器中的望远镜自动对准天体方向可以测出飞行器前进方向(纵轴)与天体方向(即望远镜轴线方向)之间的夹角(称为航向角)。
由于天体在任一瞬间相对于南北子午线之间的夹角(即天体方位角)是已知的。
这样,从天体方位角中减去航向角就得到飞行器的真航向。
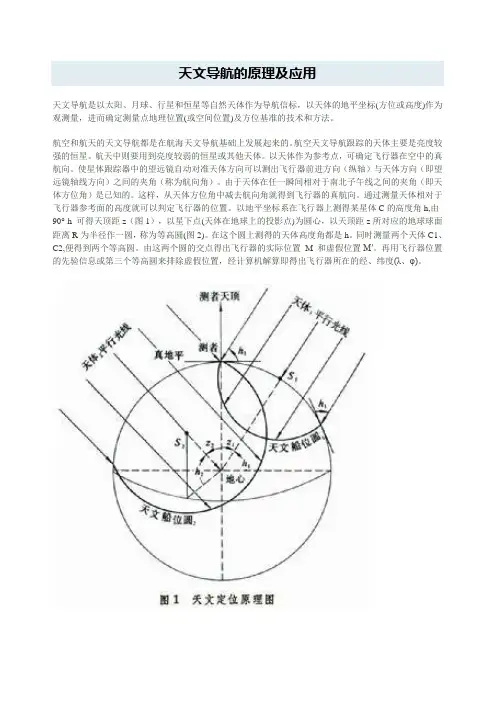
通过测量天体相对于飞行器参考面的高度就可以判定飞行器的位置。
以地平坐标系在飞行器上测得某星体C的高度角h,由90°-h 可得天顶距z(图1),以星下点(天体在地球上的投影点)为圆心,以天顶距z所对应的地球球面距离R为半径作一圆,称为等高圆(图2)。
在这个圆上测得的天体高度角都是h。
同时测量两个天体C1、C2,便得到两个等高圆。
由这两个圆的交点得出飞行器的实际位置M 和虚假位置M′。
再用飞行器位置的先验信息或第三个等高圆来排除虚假位置,经计算机解算即得出飞行器所在的经、纬度(λ、φ)。
天文导航的分类按星体的峰值光谱和光谱范围分,天文导航可分为星光导航和射电天文导航。
观测天体的可见光进行导航的叫星光导航,而接收天体辐射的射电信号(不可见光)进行导航的叫射电天文导航。
前者可解决高精度昼夜全球自动化导航定位,后者可克服阴雨等不良天气影响,通过探测射电信号进行全天候天文导航与定位。
根据跟踪的星体数,天文导航分为单星、双星和三星导航。
单星导航由于航向基准误差大而定位精度低,双星导航定位精度高,在选择星对时,两颗星体的方位角差越接近90°,定位精度越高。
三星导航常利用第三颗星的测量来检查前两次测量的可靠性,在航天中,则用来确定航天器在三维空间中的位置。
GPS复习题1.名词解释导航:通过实时地测定运载体在途中行进时的位置和速度,引导运载体沿一定航线经济而安全地到达目的地的技术。
极移:地球自转轴相对于地球体的位置不是固定的,地极点在地球表面上的位置随时间而变化的现象称为极移。
历元:在天文学和卫星定位中,与所获取数据对应的时刻也称历元。
多路径效应: 多路径效应也称多路径误差,即接收机天线除直接收到卫星发射的信号外,还可能收到经天线周围地物一次或多次反射的卫星信号。
整周模糊度:一般是未知的,通常称为整周未知数(整周待定值或整周模糊度)周跳:gps卫星信号中断时,初始整周计数发生变化的现象。
天线相位差:卫星天线几何中心与相位中心的偏差绝对定位;在地球协议坐标系中,确定观测站相对地球质心的位置。
相对定位:在地球协议坐标系中,确定观测站与地面某一参考点之间的相对位置。
整数解:将平差计算所得的整周未知数取为相近的整数,并作为已知数代入原方程,重新解算其它待定参数。
当观测误差和外界误差(或残差)对观测值影响较小时,该方法较有效,一般应用于基线较短的相对定位中。
非整数解:如果外界误差影响较大,求解的整周未知数精度较低(误差影响大于半个波长),将其凑成正数,无助于提高解的精度。
此时,不考虑整周未知数的整数性质,平差计算所得的整周未知数,不再进行凑整和重新计算。
一般用于基线较长相对定位中大地高:某点的大地高是该点到通过该点的参考椭球的法线与参考椭球面的交点间的距离。
大地高也称为椭球高,大地高一般用符号H表示。
正高:某点的正高是该点到通过该点的铅垂线与大地水准面的交点之间的距离,正高用符号Hg表示正常高:常高系统是以似大地水准面为基准的高程系统。
某点的正常高正是该点到通过该点的铅垂线与似大地水准面的交点之间的距离,正常高用Hr表示。
高程异常:似大地水准面到参考椭球面的距离,称为高程异常,记为 。
1.简答题1简述导航技术的发展历程。
推算定位-天文导航-惯性导航-无线电导航2简述导航系统的分类并举例。
天文导航的原理和应用pdf1. 引言天文导航是一种利用天体的位置和运动来确定地球或其他天体位置的方法。
天文导航的原理基于天体的固有属性和运行轨迹,通过观测和测量天体的位置和运动,可以确定导航者所处位置的方法。
本文将介绍天文导航的基本原理和其在实际应用中的具体场景。
2. 天文导航的基本原理天文导航的基本原理是利用天体的位置和运动来确定导航者所处位置的方法。
具体而言,天文导航依赖于以下几个关键要素:• 2.1 天体位置测量导航者需要准确地测量天体的位置。
这通常通过使用天文仪器如望远镜进行观测,并结合星表等工具来确定天体的准确位置。
• 2.2 天体运动测量天体的位置随时间变化,因此导航者需要测量天体的运动。
这可以通过观测天体在不同时刻的位置来实现,然后利用数学模型推算天体的运动轨迹。
• 2.3 天体运动模型为了准确地推算天体的位置和运动轨迹,导航者需要建立一定的天体运动模型。
这个模型可以基于天体的物理性质和行星力学原理来构建,并结合天文观测数据进行校准和验证。
• 2.4 导航计算方法最后,导航者需要利用测量到的天体位置和运动信息,结合天体运动模型,进行导航计算。
这个计算过程可以通过数学模型和算法来实现,以确定导航者所处的位置。
3. 天文导航的应用场景天文导航在实际应用中有广泛的应用场景。
以下列举了几个常见的应用场景:• 3.1 航空航天导航天文导航在航空航天领域有着重要的应用。
航空器和宇宙飞船可以通过测量天体的位置和运动来确定自身的位置,从而进行准确的导航和定位。
• 3.2 地理导航天文导航也可以应用于地理导航。
通过观测和测量地球上不同位置的天体,如太阳、北极星等,可以确定观测地点的经纬度等地理信息,从而实现导航和定位。
• 3.3 海上导航在海上航行中,天文导航可以帮助船舶准确地确定自身的位置。
通过测量太阳、月亮和恒星等天体的位置和运动,船舶可以使用天文仪器和导航工具确定自己的经度和纬度。
• 3.4 太空探索天文导航在太空探索中也具有重要的应用。
天文导航的原理及应用1. 引言天文导航是一种利用天体进行导航的方法。
它基于天体的位置、轨道和光学特性来确定航向和位置。
天文导航在航海、航空、航天和地质勘探等领域有着广泛的应用。
2. 天文导航的原理天文导航的原理基于天体的观测和测量。
以下是几种常用的天文导航原理:2.1 天体定位通过观测天空中的星体,可以获得它们的位置和轨道信息。
根据已知星体的位置和轨道,可以计算出观测者所处的位置和航向。
2.2 天体测距利用视差原理和测距方法,可以通过测量天体在不同观测点的位置差异来计算观测者与天体的距离。
借助测距原理,可以确定观测者的位置。
2.3 天体引导天体引导是指利用天体的运动来确定观测者的航向。
参考星体的位置和运动特征,观测者可以通过调整航向,使得参考星体始终保持在某个特定的位置。
2.4 天体光学特性天体的光学特性可以提供导航信息。
例如,太阳的位置和亮度变化可以用于季节和时间的测量,而极光则可以用于确定地理位置。
3. 天文导航的应用天文导航在以下领域有着重要的应用:3.1 航海天文导航在航海中扮演着至关重要的角色。
通过观测太阳、星星、月亮等天体,并结合地平仪和天体测距仪等工具,船舶可以确定自己的位置和航向。
3.2 航空在航空领域,天文导航被广泛应用于仪表飞行。
飞行员可以通过观测星星、月亮和太阳等天体,辅之以无线电导航系统,准确确定飞机的位置和航向。
3.3 航天天文导航在航天探测任务中起着重要的作用。
航天器可以利用天体的引力和光学信息,确定自己的轨道和位置,从而进行精确的航天飞行和控制。
3.4 地质勘探天文导航也被应用于地质勘探中的导航和定位。
通过观测地球上的星体和太阳,地质勘探人员可以确定自己的位置和方向,从而进行地质勘察和地质调查。
4. 结论天文导航作为一种利用天体进行导航的方法,具有广泛的应用前景。
通过观测和测量天体的位置、轨道和光学特性,可以准确地确定观测者的位置和航向。
天文导航在航海、航空、航天和地质勘探等领域都发挥着重要的作用,为人类探索和发展提供了重要的帮助。

天文导航的原理和应用1. 概述天文导航是一种利用天体观测进行定位导航的方法,利用天体的位置和运动规律来确定地点和方向。
它是一种古老而可靠的导航技术,广泛应用于航海、航空、太空探测等领域。
本文将介绍天文导航的基本原理和实际应用。
2. 天文导航的原理天文导航的原理基于以下几个关键点:2.1 天体位置测定天文导航通过观测天体的位置来确定自身的位置。
天体位置测定的主要方法有:•天体测量角度•天体测量方位•天体测量高度2.2 天体运动规律天体运动规律是天文导航的基础之一。
主要的天体运动规律有:•地球自转•地球公转•天体自身运动2.3 时间测量天文导航需要准确的时间测量来计算天体的位置。
时间测量可以通过摄制时间和其他天文现象的观测来实现。
3. 天文导航的应用天文导航在许多领域都有重要的应用,下面介绍几个典型的应用场景:3.1 航海天文导航是航海中常用的导航方法之一。
航海员通过观测太阳、星星等天体的位置来确定自己的位置和航向,以帮助船只找到正确的航线。
3.2 航空天文导航在航空领域也有重要的应用。
航空导航使用天文数据来辅助飞行员确定航线和飞行方向,提高飞行的安全性和准确性。
3.3 太空探测在太空探测任务中,天文导航也起到了关键作用。
通过观测行星、恒星等天体的位置,太空探测器可以定位自身的位置和确定目标的方向。
3.4 科学研究天文导航不仅可以用于定位导航,还可以为科学研究提供重要的数据。
科学家通过观测天体的位置和运动规律,可以推断出一些天体运动的规律和天文现象的原理。
3.5 文化遗产保护天文导航在文化遗产保护中也有一定的应用。
一些古代建筑和遗址的设计和布局,常常与天文现象有关,通过观测天体位置和运动规律,可以揭示出这些古代文化遗产的特殊意义。
4. 总结天文导航是一种古老而可靠的导航技术,通过观测和计算天体的位置和运动规律,可以确定地点和方向。
天文导航在航海、航空、太空探测等领域有广泛的应用,同时也为科学研究和文化遗产保护提供了重要的数据和方法。