08_路面输入及其模型
- 格式:ppt
- 大小:1.43 MB
- 文档页数:18
midas 路面结构计算Midas 路面结构计算引言:路面结构是指由多种材料组成的路面层,用于承载车辆和行人的交通载荷并分散到基础土层。
Midas 路面结构计算是一种基于有限元方法的工程分析软件,可用于设计和评估不同类型的路面结构。
本文将介绍Midas 路面结构计算的原理、应用以及其在路面工程中的重要性。
一、Midas 路面结构计算的原理Midas 路面结构计算基于有限元方法,通过将路面结构分割成小的有限元单元,使用力学原理和数学模型来模拟路面受力和变形的情况。
其原理包括以下几个方面:1.1 材料模型:Midas 路面结构计算提供了多种材料模型,包括弹性模型、线性弹塑性模型和非线性弹塑性模型。
用户可以根据具体情况选择适合的材料模型。
1.2 荷载模型:Midas 路面结构计算考虑了不同类型的荷载,包括轮载荷、静载荷和动载荷。
用户可以根据实际情况输入荷载参数,并考虑不同位置和时间的荷载变化。
1.3 边界条件:Midas 路面结构计算需要输入路面结构的边界条件,包括固定边界和自由边界。
固定边界是指路面结构与周围环境的约束关系,而自由边界是指路面结构与基础土层的接触情况。
二、Midas 路面结构计算的应用Midas 路面结构计算广泛应用于道路、桥梁和机场等交通工程中,可用于以下方面:2.1 路面设计:Midas 路面结构计算可以根据不同的交通载荷和材料特性,设计出合理的路面结构。
通过对路面结构的受力和变形进行分析,可以确定路面结构的厚度和材料的选择,以确保路面的安全性和耐久性。
2.2 路面评估:Midas 路面结构计算可以对现有路面进行评估,分析其受力和变形情况,判断其是否需要修复或重新铺设。
通过对路面结构的评估,可以提前发现潜在的问题,采取相应的维护和修复措施,延长路面的使用寿命。
2.3 路面施工:Midas 路面结构计算可以在施工过程中提供支持,帮助工程师确定适当的施工方法和工艺。
通过模拟路面结构的受力和变形情况,可以预测施工过程中可能出现的问题,并采取相应的措施加以解决。
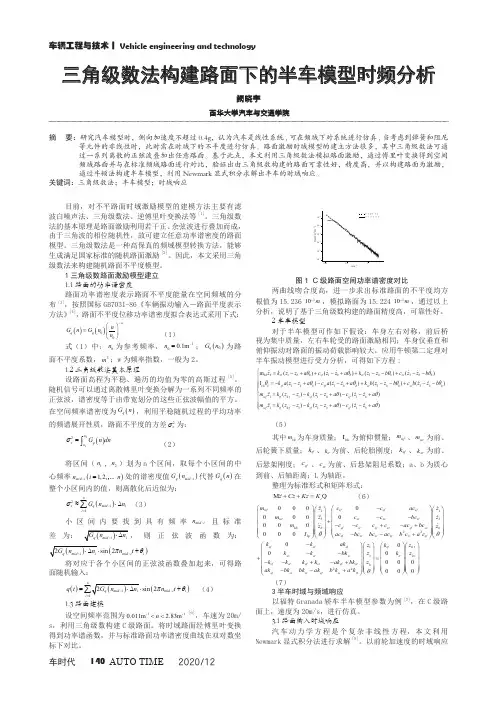
2020/12车辆工程与技术丨Vehicle engineering and technology140车时代AUTO TIME 目前,对不平路面时域激励模型的建模方法主要有滤波白噪声法、三角级数法、逆傅里叶变换法等[1]。
三角级数法的基本原理是路面激励利用若干正、余弦波进行叠加而成,由于三角波的相位随机性,故可建立任意功率谱密度的路面模型。
三角级数法是一种高保真的频域模型转换方法,能够生成满足国家标准的随机路面激励[2]。
因此,本文采用三角级数法来构建随机路面不平度模型。
1三角级数路面激励模型建立1.1 路面的功率谱密度路面功率谱密度表示路面不平度能量在空间频域的分布[3],按照国标GB7031-86《车辆振动输入―路面平度表示方法》[4],路面不平度位移功率谱密度拟合表达式采用下式:()()00wq q n G n G n n −=(1)式(1)中:0n 为参考频率,100.1m n −=;()0q G n 为路面不平度系数,3m ;w 为频率指数,一般为2。
1.2 三角级数法基本原理设路面高程为平稳、遍历的均值为零的高斯过程[5]。
随机信号可以通过离散傅里叶变换分解为一系列不同频率的正弦波,谱密度等于由带宽划分的这些正弦波幅值的平方。
在空间频率谱密度为()q G n ,利用平稳随机过程的平均功率的频谱展开性质,路面不平度的方差2z σ为:()212n z q n G n dnσ=∫ (2)将区间(1n ,2n )划为n 个区间,取每个小区间的中心频率()1,2,mid i n i n −=…,处的谱密度值()q mid i G n −代替()q G n 在整个小区间内的值,则离散化后近似为:()21nz q mid i i i G n n σ−=≈⋅∆∑ (3)小区间内要找到具有频率mid i n −且标准差为:()q mid i i G n n −⋅∆,则正弦波函数为:()()2sin 2q mid i i mid i i G n n n t πθ−−⋅∆⋅+将对应于各个小区间的正弦波函数叠加起来,可得路面随机输入:()()()12sin 2nq mid i i mid i i i q t G n n n t πθ−−==⋅∆⋅+∑(4)1.3 路面建模设空间频率范围为-1-10.011m 2.83m n <<[6],车速为20m/s,利用三角级数构建C 级路面。
沥青路面施工碳排放来源及计算模型赵瑜隆董舒静展玉华吴国华马文龙唐文豪发布时间:2023-08-04T05:40:57.247Z 来源:《工程建设标准化》2023年10期作者:赵瑜隆董舒静展玉华吴国华马文龙唐文豪[导读] 随着经济的发展,现在对公路工程的建设标准越来越高,面对资源消耗,如何把对环境的影响降到最低成为焦点。
在公路工程建设中碳排放问题不可或缺,其中沥青路面的碳排放问题占主要因素。
故本文对沥青路面的碳排放来源,并对碳排放量化模型进行了研究,找出碳排放量较大的环节,采取相应的措施减少碳排放,从而促进公路建设的可持续发展。
山东交通学院交通土建工程学院山东济南 250357摘要:随着经济的发展,现在对公路工程的建设标准越来越高,面对资源消耗,如何把对环境的影响降到最低成为焦点。
在公路工程建设中碳排放问题不可或缺,其中沥青路面的碳排放问题占主要因素。
故本文对沥青路面的碳排放来源,并对碳排放量化模型进行了研究,找出碳排放量较大的环节,采取相应的措施减少碳排放,从而促进公路建设的可持续发展。
关键字:沥青路面;碳排放;计算模型前言随着人们对环境保护意识的增强,碳排放问题越来越受到关注。
公路建设是一个碳排放量较大的行业,其中沥青路面施工过程中的碳排放量占比较大。
因此,对沥青路面施工的碳排放进行量化分析,对于制定低碳公路建设政策、降低公路建设对环境的影响具有重要意义。
通过对沥青路面施工过程中的碳排放进行量化分析,可以了解公路建设对环境的影响程度,为制定低碳公路建设政策提供科学依据。
通过对沥青路面施工过程中的碳排放进行量化分析,可以找出碳排放量较大的环节,采取相应的措施减少碳排放,从而促进公路建设的可持续发展。
通过对沥青路面施工过程中的碳排放进行量化分析,可以了解企业在公路建设过程中的碳排放情况,为企业制定碳减排计划提供参考。
通过对沥青路面施工过程中的碳排放进行量化分析,可以让公众了解公路建设对环境的影响,增强公众对公路建设的认识。
3d模型路面的建模标准
建模标准是根据具体的需求和要求而定的,但以下是一些常用的建模标准,适用于3D路面建模:
1. 尺寸准确性:确保模型的尺寸与实际路面相符。
可以通过参考现有的地理数据或测量实际路面来获得准确的尺寸。
2. 拓扑结构:路面模型应该具有合理的拓扑结构,以便在渲染和动画过程中获得更好的效果。
避免不必要的多边形和复杂的几何形状,同时确保模型具有足够的细节来呈现真实感。
3. 材质和纹理:为路面模型选择适当的材质和纹理,以使其看起来更加真实。
考虑路面的材质类型(如沥青、水泥等),并使用合适的纹理图像来增强细节和质感。
4. 真实度:努力使模型尽可能地与实际路面相似。
注意路面的特征,如边界线、标记、坑洼、裂缝等,并在模型中予以准确再现,以增加真实感。
5. 可编辑性和优化:确保模型易于编辑和修改,并尽可能减少模型的多边形数量,以提高渲染和动画性能。
6. 兼容性:最好使用广泛支持的3D文件格式(如.obj、.fbx等),以便在不同的软件中导入和使用路面模型。
当然,以上只是一些常见的建模标准,具体的要求可能因项目而异。
为了获得最佳效果,还应该参考相关行业标准和最佳实践。
由度半主动悬架的系统动力学模型。
该模型虽未对车身的侧倾与图1 二自由度1/4半主动悬架式中:m s为簧载质量的数值,单位kg;m t为非簧载质量的数值,单位kg;c0为悬架基础阻尼的数值,单位N/(m/s);c f为可调阻尼系数的数值,单位N/(m/s);k s、k t为悬架刚度系数的数值,N/m;x s为簧载质量位移的数值,单位m;x t为非簧载质量路面的接触性,路面激励的幅值随时间增大而递减,式中:x r(t)为路面垂向位移的数值,单位为频率数值,单位rad/s;v为车速数值,单位量纲;A0为初始路面振幅的数值,单位1.3 随机路面模型随机路面是最接近车辆实际运行工况的路面条件,考虑到路式中:n c为空间截止频率的数值,单位频率的数值,单位m-1;G0为路面不平度系数,无量纲高斯白噪声,无量纲;d为轮距的数值,单位的数值,单位m;x1、x2为状态变量,无量纲。
2 自适应控制策略研究2.1 路面频率识别因路面激励的频率输入与悬架振动的频率有较强的相关性,可通过采集减振器垂向振动的频率来替换路面激励输入的频率。
本文通过采用一阶过零点穿越法对频率进行估算,该算图2 路面频率识别模型式中:F ground为地棚阻尼力的数值,单位阻尼系数的数值,单位N/(m/s)。
2.2.3 SH-GH控制算法原理考虑到天棚控制与地棚控制分别只能改善车辆的平顺性与式如下:式中:F f为天地棚混合控制阻尼力的数值,单位权系数,无量纲。
图3 对扫频路面的识别结果与λground。
其表达式如下式中:λsky、λground分别为天棚控制与地棚控制的自适应增益系数,无量纲。
式中:F sky为天棚阻尼力的数值,单位数的数值,单位N/(m/s)。
2.2.2 地棚控制算法原理地棚控制算法与天棚控制算法的思路类似,假设一个虚拟的4和图5所示。
图4 随机路面下各评价指标对比曲线表1 有无自适应SH-GH 控制的悬架性能对比图5 扫频路面下各评价指标对比曲线性能指标参数被动悬架自适应SH-GH随机路面扫频路面随机路面扫频路面车身垂向加速度/(m/s 2)0.85181.05340.72810.8812轮胎动变形/m0.00190.00760.00180.0069仿真结果表明,配有自适应SH-GH 控制器的半主动悬架的车身垂向加速度(Sprung Mass Acceleration,SMA)与轮胎动变形(Dynamic Tyre Deformation,DTD)的均方根值均有不同程度的下降,具体数值如表1所示。
重载交通水泥混凝土路面结构设计摘要: 重载交通现象是世界范围内普遍存在的问题,已成为影响路面使用性能和缩短路面使用寿命的重要因素之一。
在重载交通下路面如何实现长寿命是路面结构研究的一种发展方向。
基于此,本文提出了一种适用于重载交通下混凝土道路结构,介绍重载路面结构的构造以及对其进行有限元分析,并通过实际应用表明,其效果良好。
关键词:重载路面;有限元;计算;设计引言随着社会经济的发展及汽车工业技术的提高,交通量快速增长,车辆轴载也在不断增加。
超、重载交通对道路路面的正常使用具有很大影响,是道路路面使用初期产生严重破坏的主要原因,也影响着交通安全和道路使用者交通出行环境。
因此,在重载交通下,一方面要持续加强交通管理、严控超载运输,同时有必要深入研究合适的路面结构设计,以适应重载交通运输要求。
1 重载路面结构的构造本文提出的道路重载交通路面结构,主要构造为:自上而下包括面层(30cm)、基层(45cm)、垫层(25cm)和路床。
(1)面层。
由多块混凝土现浇的行车道板组成,每块行车道板在道路纵向上的长度为4~6m,在道路横向的上宽度为4~5m。
分别在道路纵向、横向上的行车道板间设纵缝、横缝。
图1 道路立面及平面(单位:cm)行车道板划分为行驶区域(承受行驶车辆车轮压力的区域)和禁行区域(不允许行驶车辆车轮驶入的区域)。
在行驶区域下方增设抗弯钢筋和架立钢筋及箍筋;禁行区域按照常规进行配筋(见图2之N16、N17钢筋布置示意)。
图2 面层设计(单位:cm)行驶区域主要的配筋方案为:①抗弯钢筋(N10)。
抗弯钢筋布置于行驶区域轮载作用下的受拉区。
其横向间距12.5cm,钢筋直径根据受力计算选取,一般取值范围为16~25mm。
②架立钢筋(N11)。
架立钢筋起架立作用,同时辅助抗压。
一般钢筋取值范围为8~12mm。
③箍筋(N13)。
设置箍筋可有效增强行驶区域的整体性,同时增强其抗剪能力。
箍筋在道路方向上间距取20cm。
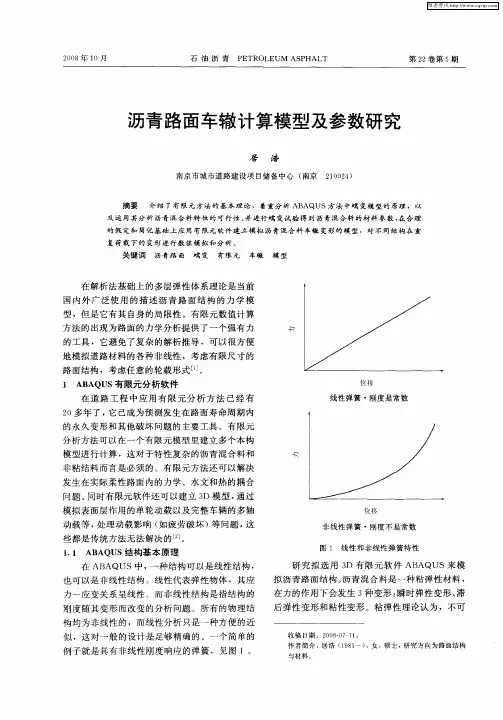
bt PCI ae -=0b0a NPCI e -=沥青路面模型参数拟合与性能预测沥青路面的使用性能评价是路面养护、经济分析及路面管理系统重要组成部分。
直接影响路面的养护对策和养护资金的投入,为了在时间和空间上优化分配给定的养护预算,确定最佳的路面养护方案,[1]必须结合实际的路面技术状况进行模型参数拟合和路面使用性能的预测。
按照工作大纲讨论时领导和专家们提出的:研究路面性能衰变模型难度很大,暂时数据积累不足,模型过分繁琐应用效果不一定好,模型应该尽量简单、容易建立和修改的原则进行的要求。
项目组选择了负指数曲线的模型作为重点研究。
目前国内外常用的路面性能预测模型主要有: (1)现有CPMS 管理系统模型:——折线型模型:折线型曲线就是三条首尾相连的直线,表示路面的性能指标的衰变可分为三个阶段,每个阶段都是一个直线的衰变,这是一个简化的模型,确定了这三段折线的首末端点的坐标就确定了整条曲线。
——负指数曲线的模型: ——修正S 型曲线模型: (2)上海模型同济大学孙立军教授及其课题组提出的模型:01exp ()PCI PCI tβα⎧⎫⎡⎤=--⎨⎬⎢⎥⎣⎦⎩⎭(3)天津模型天津采用的路面性能预测标准模型: (4)广东模型广东采用的路面性能预测标准模型: 5.0dy PCI e -= (5)北京模型北京采用的路面性能预测标准模型:100ayb PCI e -=综合以上各种模型,项目组初步选用负指数曲线模型、修正S 型曲线模型以及孙立军教授提出的模型来表征沥青路面的性能衰变趋势。
为了验证选用模型的合理性,选取锦阜、锦朝、沈四、沈阳环城四条高速公路典型路段进行了分析评价。
确定路面结构强度(PSSI )、路面平整度(RQI )、路面破损(PCI )三个综1max minmin 01a tPCI PCI PCI PCI a e -=++合指标。
通过综合分析与性能模型拟合,采用负指数曲线模型对三个综合指标和裂缝率(CR )、车辙深度(RD )、功能性破损(LR )、横向力系数(SFC )四个单值触发指标进行了拟合,得到模型参数,并对未来路面技术状况进行了预测。
沥青路面高温温度场预估的LSTM神经网络模型为了有效地预估沥青路面的高温温度场,本研究提出了一种基于LSTM(Long Short-Term Memory)神经网络模型的预测方法。
该方法利用历史数据和气象因素作为输入,通过训练预测模型来估计未来的高温温度场。
下文将介绍该方法的原理、实现以及实验结果。
1. 方法原理LSTM神经网络是一种递归型神经网络,专门用于处理和预测时间序列数据。
由于沥青路面的温度场具有一定的时间关联性,利用LSTM模型可以更好地捕捉温度场的演化规律。
2. 数据准备为了训练和测试LSTM模型,我们需要收集足够的历史数据和相关的气象因素。
历史数据包括沥青路面的温度场测量值,而气象因素则包括气温、湿度、风速等。
这些数据需要进行预处理和标准化,以便与LSTM模型的输入要求相匹配。
3. LSTM模型的构建LSTM模型包含输入层、隐藏层和输出层。
输入层接收历史数据和气象因素,隐藏层采用LSTM单元来处理时序数据,输出层则生成对应的高温温度场的预测结果。
通过优化算法(如反向传播算法)对模型进行训练,以使预测结果尽可能地接近真实值。
4. 实验设计为了评估提出的LSTM模型的预测性能,我们从实际的路面温度场中随机选取一部分数据作为训练集,剩余数据作为测试集。
然后,利用训练集对LSTM模型进行训练,并利用测试集进行模型的验证和评估。
5. 实验结果将训练过的LSTM模型应用于测试集中的数据,并与实际观测值进行对比,我们可以得到模型的预测误差。
通过计算平均绝对误差(MAE)、均方根误差(RMSE)等指标,可以评估模型的准确性和稳定性。
实验结果表明,提出的LSTM模型在预测沥青路面高温温度场方面具有较好的性能表现。
结论:通过本研究中提出的基于LSTM神经网络模型的方法,可以准确预估沥青路面的高温温度场。
该方法充分利用历史数据和气象因素,能够捕捉温度场的时序关联性,从而提供更精确的预测结果。
未来的研究可以进一步优化模型的参数设置和训练策略,以提高预测性能,并将该方法应用于实际的工程项目中,为路面温度的调控和管理提供参考依据。
《车辆系统动力学》(此复习题覆盖大部分试题。
考试范围以课堂讲授内容为准。
) 一、概念题1. 约束和约束方程(19)力学系统在运动时会受到某些几何和运动学特性的限制,这些构成限制条件的物体称为约束。
用数学方程表示的约束关系称为约束方程。
2. 完整约束和非完整约束(19)如果系统约束方程仅是系统位形和时间的解析方程,则这种约束称为完整约束;如果约束方程不仅包括系统的位形,还包括广义坐标对时间的倒数或者广义坐标的微分,而且不能通过积分使之转化为包括位形和时间的完整约束方程,则这种约束就称为非完整约束。
3. 轮胎侧偏角(31)车轮回转平面与车轮中心运动方向的夹角。
4. 轮胎径向变形(31)定义为无负载时的轮胎半径rt 与负载时的轮胎半径rtf 之差。
5. 轮胎的滚动阻力系数(40)相应载荷下的滚动阻力与轮胎垂直载荷的比值。
6. 轮胎驱动力系数(50)轮胎驱动力系数定义为驱动力与法向力的比值 7. 边界层(70)当流体绕物体流动时,在物体壁面附近受流体粘性影响显著的薄层称为边界层。
8. 压力系数(74)假设车身某点压力p 、速度v ,来流压力p ∞、速度v ∞,定义压力系数21⎪⎪⎭⎫ ⎝⎛-==∞∞∞v v q p-p C p9. 风洞的堵塞比(77)车辆迎风面积和风洞送风横断面面积的关系(堵塞比) 10. 雷诺数(79)雷诺数定义为气流速度v 、流体特性长度L 的乘积与流体运动粘度ν的比值。
Re=vL/ν 11. 空气阻力系数(82-83)q /A F Aq F C D D D ==Fd 为空气阻力,A 为参考面积,通常采用汽车迎风面积,q 为动压力12. 旋转质量换算系数(88)12dv ii +=r m Θδ 其中 )(Ti c e 2g 20dr 20w i ΘΘΘi i Θi ΘΘ++++=为等效转动惯量。
mv 是整车整备质量,rd 为驱动轮的滚动半径。
13. 后备驱动力(92)车辆行驶时实际需要的驱动力FDem 与车辆所能提供的最大驱动力Fx 的差值。