微机电系统陀螺仪随机漂移误差建模与滤波研究
- 格式:pdf
- 大小:284.80 KB
- 文档页数:4
无人机微机电系统惯性传感器卡尔曼滤波技术作者:孙立志来源:《无人机》2018年第07期在消费级和工业级无人机中,微机电系统惯性传感器是其飞控系统十分重要的传感器。
微机电系统信号噪声的存在降低了传感器的精度,对此本文提出了利用Allan方差估计分析噪声特性的方法,研究了基于卡尔曼滤波的MEMS信号降噪方法,解决了在无人机飞控系统中某些去噪方法计算复杂的问题,通过实验验证了该方法抑制微机电系统噪声的有效性。
微机电系统(Micro-ElectroMechanical System,MEMS)是指尺寸在毫米级别甚至更小的传感器系统。
微机电系统传感器广泛配备于多种无人机系统,特别是消费级和工业级无人机,这得益于微机电系统传感器所具有的重量轻、功耗低、集成度高同时成本低等一系列优点。
微机电系统传感器包括运动传感器、压力传感器、光传感器等,本文涉及的微机电系统惯性传感器是运动传感器的一种,集成了三轴陀螺仪和三轴加速度计,是该级别无人机飞控系统最重要的传感器之一,应用十分广泛。
但微机电系统惯性传感器自身也有不可避免的缺点,即输出信号噪声成分多,若不进行滤波处理则无法使用,因此本文提出一种基于卡尔曼滤波的微机电系统惯性传感器信号降噪方法,使该类传感器应用于无人机时具有较高的精度。
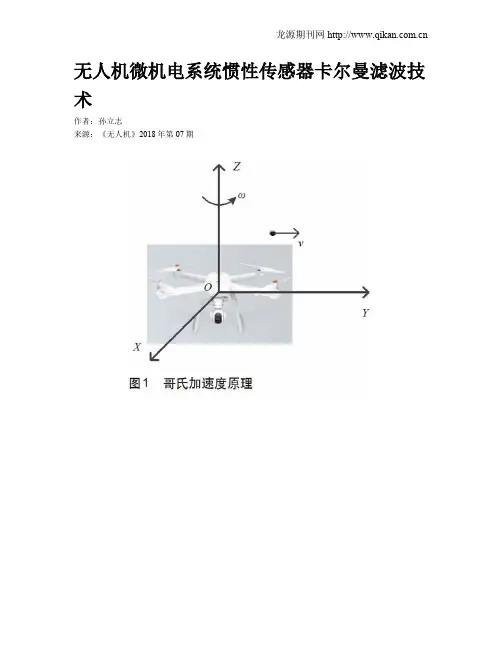
微机电系统惯性传感器原理微机电系统以哥氏效应为基本原理,是一种振动式的角速率传感器。
哥氏效应是指在一个作旋转运动的坐标系中,当某一点相对该动坐标系作直线运动时,该动点即具有哥氏加速度,对此可得哥氏加速度的表达式:a c= 2×ω×v (1)式中:ω——动坐标系的角速度;v——质点相对动坐标系的线速度。
微机电系统工作时,通过电驱动,使微机械的振动框架达到谐振状态,而产生一定的速度,此时当微机电系统随平台框架旋转时,即产生科氏力;科氏力与检测框架发生关联,即形成检测信号,经放大输出得到电信号。
据此微机电系统将无人机机体的旋转角速度信息转换为与之成比例的电压信号,通过模数转换得到角速度的数字信息,将角速度进行积分可得框架的角度信息。
基于卡尔曼滤波的陀螺仪阵列技术研究刘明雍;朱立;董海霞【摘要】多个相同型号的陀螺仪测量轴相互平行,测量同一个角速度信号所组成的阵列叫做陀螺阵列.通过研究陀螺阵列提高惯性测量精度的信息处理算法,建立单个微机电(MEMS)陀螺仪的两种不同漂移模型,利用Allan方差对漂移系数进行辨识,将辨识出的随机漂移系数应用于卡尔曼滤波.通过卡尔曼滤波将陀螺阵列的信息融合为一个较高精度的输出,证明了卡尔曼滤波的稳定性.通过实验对比了不同建模方法的优劣,并且验证了基于卡尔曼滤波的信息融合方法可以有效提高MEMS陀螺仪的精度.【期刊名称】《兵工学报》【年(卷),期】2016(037)002【总页数】7页(P272-278)【关键词】控制科学与技术;陀螺仪阵列;信息融合;卡尔曼滤波【作者】刘明雍;朱立;董海霞【作者单位】西北工业大学航海学院,陕西西安710072;西北工业大学航海学院,陕西西安710072;西北工业大学航海学院,陕西西安710072【正文语种】中文【中图分类】TP14微机电(MEMS)陀螺仪相比于机械陀螺、光纤陀螺及激光陀螺等传统陀螺具有体积小、质量轻、价格低、寿命长和易于批量生产等优点。
然而,目前MEMS陀螺的精度还无法与传统高精度陀螺相媲美,使得MEMS陀螺主要应用于汽车、玩具等低端领域,在航空、航天等高端领域尚未被大规模应用。
通过利用MEMS陀螺仪的优点组成陀螺阵列,在一块芯片上集成成百上千个MEMS陀螺仪测量同一个角速度信号,并将冗余量测信息融合为高精度的输出,为提高MEMS陀螺仪的精度提供了另外一种方向。
1992 年, Allan等提出灵巧时钟的概念[1],通过对3个一般精度的运动手表(月误差40 s)进行随机漂移建模并进行最优估计得到了月误差仅为1 s的较高精度时钟。
这种通过对传感器的漂移进行特征描述,集成多个冗余传感器的测量信息并进行数据融合的方法,对于MEMS陀螺仪的精度提高具有特别的借鉴意义。
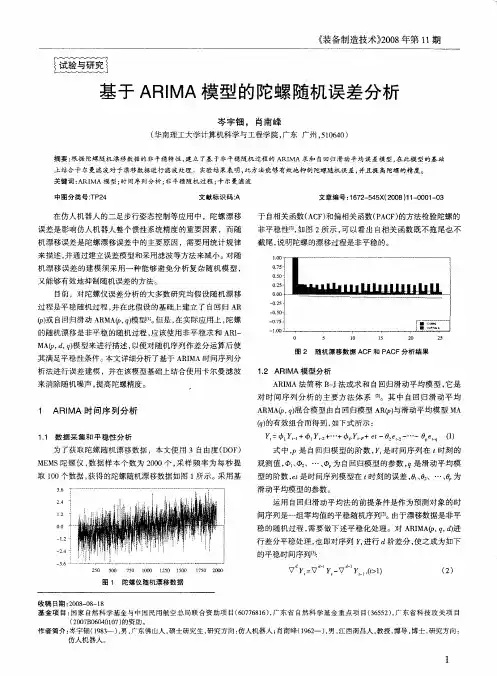
第3l卷第9期哈尔滨工程大学学报V01.3l№.92010年9月Journal of Har bin Engi neer ing Un iver sity Se p.2010d o i:10.3969/j.i s s n.1006-7043.2010.09.015基于Kalman滤波的MEMS陀螺仪滤波算法钱华明1,夏全喜2,阙兴涛1,张强1(1.哈尔滨工程大学自动化学院,黑龙ix.哈尔滨150001;2.解放军信息工程大学测绘学院,河南郑州450002)摘要:针对MEMS陀螺仪精度不高、随机噪声复杂的问题,研究了某MEMS陀螺仪的随机漂移模型.应用时问序列分析方法,采用AR(1)模型对经过预处理的MEMS陀螺仪测量数据噪声进行建模,进而基于该AR模型并采用状态扩增法设计Kalman滤波器.速率试验和摇摆试验仿真结果表明,在静态和恒定角速率条件下,采用该算法滤波后的MEMS 陀螺仪的误差均值和标准差都比滤波前有了明显的降低.针对摇摆基座下该算法随摆动幅度的增大效果变差的问题,从提高采样率和选择自适应Kalman滤波2个方面对算法进行改进.仿真结果表明,2种方法都能改善滤波效果,然而考虑到系统采样频率和CPU计算速度的限制,自适应滤波有更高的实用性.关键词:随机漂移;微机电系统;Kalman滤波;自适应Ka lman滤波;陀螺仪中图分类号:V241.5文献标志码:A文章编号:1006-7043(2010)09-1217-05Algorithm for a ME M S g y r o sc o p e b as e d on Kalman filterQIAN Hua.min91,XIA Quan.xi2,QUE Xing—ta01,ZHANG Qian91(1.College of A u t om a ti o n,Ha r bi n E n gi n ee r i ng U n iv e r si t y,Ha r bi n150001,Ch i na;2.I n st i t ut e of S ur v e yi n g and Ma pp ing,I nf or ma-tion Engineering University of PLA,Zh en gzh ou450002,Ch in a)A b s tr a c t:I n order t o imp rov e the performance of gyroscop es,the rando m drift of a mi cr o—e le ct ro—me cha ni ca l sy stem (MEM S)g yro w a s analyzed and modele d.Based the basic p ri nc ip le s of time series analysis,AR(1)was a-dop te d t o mod el the p r ep r o c e s s ed data mea sur ed b y M E MS gyroscope.An augmenti ng st at e v e c t o r w a s used to de—sign the Kal ma n filter.By si mu l at i ng r a t e t e s t a n d a n oscillating test,it w a s demonstrated that in the c a s e s of stat-ic s t a t e c o n s t a n t ang u l a r r a t e,t h e m ea u value a n d s t a n d a r d d e v i at i o n of the e r r o r s w e r e much s ma l l er after fihe—ring than before f i lt e r i n g.H o w ev e r,t h e effect decre ased w hen i t W as in a n oscillating state.With amplitude in—cr e a se,t h e m e a n values and s ta n da r d de v ia t io ns of elT o rs also increased.The problem Was analysed and tw o meth—ods wer e adop te d t o re du ce the e f fe c t.T h es e i n vo l ve d i nc r ea si n g the sample r at e and adopting a ll adaptive Ka l m a nfi lt er.Th e si m ul a t io n d em o n st r a t ed that both me tho ds could improve the performance of the f i lt e r.H ow e v er,c o n—sidering of practical limits to sampling r a t e s a s well the ca l c ul a ti o n s p e ed of the CPU,an adaptive Kalman fil te r is more practical.Ke yw or ds:ra nd o m dr if t;M E MS;Ka lm an f il ter;a da pti ve K a lm a n filt er;gyro scop e微机电系统(micro—electro—mechanical system,陀螺仪精度的主要因素.对其进行模型辨识并滤波ME M S)惯性器件在低成本惯性系统中获得越来越是提高陀螺仪性能的主要途径L11.采用神经网络、广泛的应用,但目前M EMS陀螺仪的精度仍然较小波分析等方法对陀螺仪的随机误差进行建模可以低,限制了其进一步应用.通过有效的降噪方法改善达到这个目的,但这些方法得到的模型通常具有较陀螺仪性能,以满足较高精度的应用需求,是目前研高的阶数,并不十分适合于低成本系统的实时在线究的重要问题.研究表明,随机噪声是影响MEMS估计旧引.通过时序分析方法,采用AR模型同样可以对陀螺随机误差进行建模,其使用条件要简单得收稿日期:2009-04-10.多.在正确地建立了陀螺的随机误差模型之后需要作者简介:钱华明(1964一)。
第13卷第6期中国惯性技术学报 2005年12月文章编号:1005-6734(2005)06-0013-05微机械IMU数据建模与滤波方法研究赵伟臣,付梦印,张启鸿,邓志红(北京理工大学信息科学技术学院,北京100081)摘要:针对轮式移动机器人内部的微机械(MEMS)IMU进行研究,采用时间序列分析方法建立其随机噪声的ARMA模型,进而通过Kalman滤波有效地降低MEMS IMU随机噪声对其精度的影响,频域分析结果表明文中建模和滤波方法对提高MEMS IMU精度的有效性。
关键词:MEMS IMU;时间序列分析;ARMA数学模型;Kalman滤波中图分类号:U666.1 文献标识码:AInvestigation on Modeling and Filter Methodsfor MEMS IMU Drift DataZHAO Wei-chen, FU Meng-yin, ZHANG Qi-hong, DENG Zhi-hong (College of Information Science and Technology, Beijing Institute of Technology, Beijing 100081, China)Abstract: This paper is about the MEMS IMU in robot car. By using the data modeling methods of time series analysis, the ARMA model of random noise of MEMS IMU is built. Then the Kalman filter can be used to greatly reduce the effects of random noise of MEMS IMU on the inertial navigation systems. Frequency analyses show that the method of modeling and filter is validity to improve the precision of MEMS IMU.Key words: MEMS IMU; time series analysis; ARMA modeling; Kalman filter0 引 言惯性测量单元(IMU)是一种用来测量运动体运动姿态的惯性传感器,它广泛应用于航空、航海以及陆地导航领域。
基于自适应Kalman滤波的MEMS陀螺随机误差分析王辛望;沈小林;刘新生【摘要】In order to improve performance of a certain type MEMS gyroscope,based on the principles of time series analysis,ARMA model is established and ARMA(2,1)is used to establish MEMS gyroscope random error model. The Kalman filter is designed and the result of static test and the constant rate test show that under the classic Kal-man filter,the mean and mean square deviation of the MEMS gyroscope random error is reduced by 32.62% and 66.31% in the static test;the mean is much smaller and the mean square deviation is decreased by an order of mag-nitude in the constant rate test. Based on the fact that the classic Kalman filter can not adapt to the vibration test of large amplitude,a new adaptive Kalman filter is proposed in this paper by looking for the adaptive calibration factors to deal with the problem of the divergence in the classic Kalman filter. The results of vibration test show that the mean and the mean square deviation after filtering is reduced by 8.25% and 8.36% when the amplitude is 100°.%针对某型MEMS陀螺随机误差较大、精度不高的问题,通过时间序列分析法,建立自回归滑动平均 ARMA(Auto-Regressive and Moving Average)模型,采用ARMA(2,1)模型将预处理后的MEMS陀螺随机误差进行建模.设计基于ARMA模型的经典Kalman滤波器.静态试验和恒定速率试验结果表明在经典Kalman滤波器作用下,静态试验下其均值与均方差下降32.62%和66.31%;恒定速率试验下,其均值有明显的降低,其均方差减小了一个数量级.针对经典Kalman 滤波器不能解决振动试验中大振幅时滤波发散问题,提出一种新的自适应Kalman滤波法,通过寻找合适的标定因子s解决滤波发散问题.振动试验结果表明,当振幅为100°时,滤波后的均值和均方差分别下降8.25%和8.36%.【期刊名称】《传感技术学报》【年(卷),期】2017(030)011【总页数】5页(P1666-1670)【关键词】MEMS陀螺;随机误差;自适应Kalman滤波;时间序列分析;自回归滑动平均;Allan方差【作者】王辛望;沈小林;刘新生【作者单位】中北大学计算机与控制工程学院,太原030051;中北大学计算机与控制工程学院,太原030051;江苏曙光光电有限公司,江苏扬州225009【正文语种】中文【中图分类】V241.5微机电系统(Micro-Electro-Mechanical System)惯性器件在无人机、精确制导武器、低成本惯导系统等领域得到大量应用。
一种MEMS陀螺仪误差标定方法研究吕冰1,2 邓超凡1,2发布时间:2023-07-18T04:06:34.497Z 来源:《中国科技信息》2023年9期作者:吕冰1,2 邓超凡1,2[导读] 介绍了一种MEMS陀螺仪的误差标定方法,根据MEMS陀螺仪误差特性,建立三轴MEMS陀螺仪输出误差模型。
由于MEMS陀螺仪参数会随温度变化发生偏移,因此,研究了MEMS陀螺仪误差参数随温度变化特性,对MEMS陀螺仪灵敏度参数及零偏参数采用二次拟合的方法进行温度补偿,通过试验验证了补偿后的陀螺仪各轴角速率误差比没补偿前降低了2~3个数量级,经过温度补偿后的三轴MEMS陀螺仪的输出误差均小于0.1°/s,验证了校准模型及校准方法的有效性。
1.中国船舶集团有限公司第七一〇研究所;2.国防弱磁一级计量站湖北宜昌 443003摘要:介绍了一种MEMS陀螺仪的误差标定方法,根据MEMS陀螺仪误差特性,建立三轴MEMS陀螺仪输出误差模型。
由于MEMS陀螺仪参数会随温度变化发生偏移,因此,研究了MEMS陀螺仪误差参数随温度变化特性,对MEMS陀螺仪灵敏度参数及零偏参数采用二次拟合的方法进行温度补偿,通过试验验证了补偿后的陀螺仪各轴角速率误差比没补偿前降低了2~3个数量级,经过温度补偿后的三轴MEMS 陀螺仪的输出误差均小于0.1°/s,验证了校准模型及校准方法的有效性。
关键词:误差标定;温度补偿;微机电系统(MEMS)0 引言随着微机电系统(MEMS)技术和计算机技术的不断发展,低成本的航姿参考单元(AHRS)被广泛应用在各种微小型无人机、机器人、车辆船舶,水下无人系统等领域[1]~[3],低成本的航姿参考单元一般由MEMS三轴陀螺仪、三轴加速度计以及其他MEMS器件构成。
而MEMS陀螺仪作为微机电系统的核心器件之一,其测量精度直接影响系统测量结果[4]。
影响MEMS陀螺仪测量精度的主要因数由以下几方面:刻度因子、失准角、零偏、随机漂移等。
一种光纤陀螺随机漂移的高精度建模方法光纤陀螺是一种高精度的角速度传感器,常用于惯性导航、航天、航空等领域。
然而,由于各种原因,光纤陀螺存在着随机漂移的问题,这给测量结果的精度带来了一定的影响。
因此,建立一种高精度的光纤陀螺随机漂移建模方法对于提高其精确度至关重要。
光纤陀螺随机漂移通常是由于陀螺器件内部噪声和外部环境干扰等因素引起的,因此对这些因素进行建模是解决随机漂移问题的关键。
以下是一种光纤陀螺随机漂移的高精度建模方法:首先,对光纤陀螺内部噪声进行建模。
内部噪声可以分为陀螺器件的固有噪声和光纤中的光纤噪声两部分。
固有噪声通常由器件内部元件的非线性特性以及电磁辐射等引起,可以通过实验测量方法得到。
光纤噪声可以根据光纤材料的特性以及信号传输的机制进行建模。
其次,考虑外部环境干扰对光纤陀螺的影响。
外部干扰包括温度变化、机械振动、磁场干扰等因素。
对于温度变化引起的随机漂移,可以通过温度传感器对温度进行实时测量,并进行环境温度变化模型的建立。
对于机械振动和磁场干扰等影响因素,可以通过传感器获取相关信号并建立模型进行补偿。
最后,通过数据融合技术对模型进行优化。
数据融合技术常用于将多个传感器的测量结果进行整合,提高测量的准确性和鲁棒性。
通过将光纤陀螺的测量结果与其他传感器(如加速度计、磁力计等)测量结果进行融合,可以减小随机漂移的影响,提高光纤陀螺的精度。
综上所述,光纤陀螺随机漂移的高精度建模方法包括对内部噪声和外部环境干扰进行建模,并通过数据融合技术对模型进行优化。
这种建模方法可以提高光纤陀螺的精度,为其在惯性导航、航天、航空等领域的应用提供更可靠的支持。
微机电陀螺系统的仿真建模与优化近年来,微机电(Micro-Electro-Mechanical Systems,MEMS)技术在各个领域得到广泛应用,其中之一便是微机电陀螺(MEMS gyroscope)系统。
微机电陀螺系统具有体积小、功耗低、响应速度快等优点,在导航、无人驾驶、航天等领域有着巨大的应用前景。
然而,要使微机电陀螺系统具备更高的精度和稳定性,首先需要进行仿真建模与优化。
一、微机电陀螺系统的工作原理微机电陀螺系统是基于陀螺效应的旋转速率测量装置。
其主要由感应结构和测量电路两部分组成。
感应结构内包含一个惯性转动部件,当系统进行旋转时,惯性转动部件会受到转动力矩的作用,从而发生旋转;测量电路则测量感应结构旋转产生的信号,从而得到待测目标的角速度。
二、仿真建模的意义与方法仿真建模是对系统工作原理进行模拟与演算,通过计算机软件对待测系统的性能进行预测和分析。
微机电陀螺系统的仿真建模可以帮助优化设计,提前发现潜在问题,避免实际制造过程中的不必要成本和时间浪费。
常见的仿真建模方法包括有限元分析法和计算流体力学法。
三、优化设计的主要方向微机电陀螺系统的优化设计主要包括以下几个方向:1. 提高灵敏度:通过优化双层结构、增大面积、改进布局等手段,提高微机电陀螺系统的灵敏度和精度。
同时,合理设计感应结构的刚度和质量分布,降低内部噪声和非线性现象。
2. 降低功耗:优化功耗可以延长系统续航时间,降低维护成本。
通过降低电路中的损耗、减小惯性转动部件的惯性力矩等手段,达到降低功耗的目的。
3. 提高稳定性:通过优化材料选择、改善传感器加工工艺、降低温度偏差等手段,提高微机电陀螺系统的稳定性和可靠性。
此外,减小外界干扰、优化信号处理算法等也有助于提高稳定性。
四、仿真建模与优化案例以一款微机电陀螺系统的设计与优化过程为例,该系统主要应用于无人驾驶汽车。
首先,利用有限元软件对微机电陀螺感应结构进行建模,并进行转矩分析,得到初始转矩曲线。
基于Kalman滤波算法的陀螺仪动态漂移补偿研究马正华;卢成俊;戎海龙;贺小捧【摘要】应用MEMS陀螺仪测量人体手臂运动姿态时,针对陀螺仪受线加速度干扰导致测量姿态发散的问题,提出基于Kalman滤波算法的姿态误差补偿方法;该方法首先将陀螺仪采集到的角速度通过方向余弦算法解算得到姿态角,并将陀螺仪动态漂移造成的姿态角误差视为时变信号,通过建立姿态角漂移误差的状态方程及观测方程,应用卡尔曼滤波算法,实现对姿态角漂移误差的估计,最终达到对陀螺仪动态漂移误差的补偿;实验与仿真结果表明,应用该算法能够有效的抑制线加速度干扰导致的陀螺仪测量的姿态发散,适用于陀螺仪对人体手臂运动姿态的测量.【期刊名称】《计算机测量与控制》【年(卷),期】2016(024)009【总页数】4页(P191-194)【关键词】姿态测量;方向余弦算法;卡尔曼滤波算法;姿态补偿【作者】马正华;卢成俊;戎海龙;贺小捧【作者单位】常州大学信息科学与工程学院,江苏常州 213000;常州大学信息科学与工程学院,江苏常州 213000;常州大学信息科学与工程学院,江苏常州 213000;常州大学信息科学与工程学院,江苏常州 213000【正文语种】中文【中图分类】TP3获取真实准确的人体运动姿态信息是对人体开展生物力学方面的研究和对人体的各种运动信息进行检测、跟踪以及统计分析的基础。
MEMS惯导器件由于体积小、成本低、易于数字化和动态测量特性良好等优点成为人体姿态测量的理想选择[1-3]。
对陀螺仪输出进行积分便能得到姿态信息[4],而由于本身特性的限制,MEMS陀螺仪的输出噪声以及随机漂移导致解算得到的姿态产生漂移误差[5-6],并随时间推移而累积增大,因此陀螺仪通常与其他姿态传感器组合使用获得稳定可靠的姿态信息。
目前传统的方法是采用融合算法,以加速度传感器、地磁传感器输出姿态角来修正陀螺仪的输出。
Sabatini AM提出了一种VSD-EKF(variable-state imension extend kalman filter)算法,该算法假设目标物体在缓慢移动,即假设载体没有线加速度干扰,用MARG 传感器估计人体三维姿态信息,但该算法解算精度只排除了环境磁场影响和陀螺仪随机误差影响,没有考虑到人体姿态变化带来的加速度变化导致加速度计干扰的情况[7]。
基于卡尔曼滤波的MEMS陀螺仪漂移补偿陈晨;赵文宏;徐慧鑫;周芬芬;安平【摘要】Aiming at solving the problem that it is easy to produce the error of MEMS gyroscope in the test, the Caiman algorithm was investigated. After the analysis of the cause of the error of the gyroscope,the error model of gyroscope was established. The Caiman filter algorithm was presented and the effect of Caiman filter was evaluated on the Allan variance method, the gyroscopes were tested on the rotating speed device. The experimental results indicate that the combination of model and Caiman filter can reduce the error of gyroscope in the test.%为解决MEMS 陀螺仪在测量过程中容易产生漂移的问题,将卡尔曼算法应用于陀螺仪的漂移补偿中.分析了陀螺仪误差源,建立了陀螺仪误差模型,提出了用卡尔曼滤波算法处理陀螺仪零点随机误差的方法,通过运用Allan方差分析法评价了卡尔曼滤波效果;最后,在转速测试平台上进行了陀螺仪测量试验.研究结果表明,通过建立误差模型和采用卡尔曼滤波算法能有效减小陀螺仪测量过程中的漂移.【期刊名称】《机电工程》【年(卷),期】2013(030)003【总页数】4页(P311-313,321)【关键词】MEMS陀螺仪;卡尔曼滤波;Allan方差分析法【作者】陈晨;赵文宏;徐慧鑫;周芬芬;安平【作者单位】浙江工业大学超精密加工实验室,浙江杭州310014【正文语种】中文【中图分类】TH161+.7;TH890 引言在球体研磨过程中,施加压力、磨粒颗粒大小、抛光液浓度以及设备本身的误差都会影响到球体运动轨迹,使球体偏离预期轨迹。
MEMS陀螺正交误差分析与仿真MEMS陀螺是一种基于微机电系统(MEMS)技术制造的陀螺仪,广泛应用于导航、飞行控制、惯导系统等领域。
然而,由于制造过程和外部环境的影响,MEMS陀螺存在一定的正交误差,对其性能和精度造成了一定的影响。
因此,对MEMS陀螺的正交误差进行分析与仿真,有助于进一步优化设计和提高性能。
首先,我们来介绍下MEMS陀螺的正交误差。
MEMS陀螺的正交误差主要包括三个方面:比例误差、零偏误差和比例零偏耦合误差。
比例误差是指完成一个旋转周期,陀螺输出的角度与实际旋转角度之间的偏差。
零偏误差是指在无旋转情况下,陀螺输出的角度不为零。
比例零偏耦合误差是指比例误差和零偏误差之间的相互影响。
为了准确分析和仿真MEMS陀螺的正交误差,首先需要建立相应的数学模型。
MEMS陀螺的运动方程可以由角速度和角位移之间的关系来描述。
常用的数学模型有马宏陀螺运动方程和欧拉利用方程。
马宏陀螺运动方程是通过陀螺输出信号和陀螺器件的几何参数来建立陀螺的数学模型。
它将陀螺的转动运动分解为三个轴向的旋转运动,即偏航、俯仰和横滚。
通过求解这些方程可以得到陀螺的输出角速度和角位移。
欧拉利用方程则是通过陀螺的角速度和初始条件来描述陀螺的转动运动。
根据欧拉利用方程,可以得到陀螺的转动角速度与初始条件之间的关系。
通过比较模型输出值与实际测量值,可以进一步分析陀螺的正交误差。
在实际的分析和仿真过程中,可以使用软件工具例如MATLAB或者Simulink来建立数学模型,并进行正交误差的仿真分析。
通过调整模型参数和输入条件,可以模拟不同工作状态下的MEMS陀螺性能和误差变化情况。
此外,为了更准确地分析MEMS陀螺的正交误差,还可以进行实验验证。
通过与实际测量数据进行比较,可以验证仿真模型的准确性,并优化模型参数,提高其精度和可靠性。
总结起来,MEMS陀螺的正交误差分析与仿真是对其性能和精度进行优化的重要步骤。
通过建立数学模型,利用仿真工具进行仿真分析,并结合实际实验验证,可以全面了解MEMS陀螺的正交误差特性,并为进一步的设计和优化提供参考依据。
基于卡尔曼滤波的MEMS陀螺仪漂移补偿
陈晨;赵文宏;徐慧鑫;周芬芬;安平
【期刊名称】《机电工程》
【年(卷),期】2013(030)003
【摘 要】为解决MEMS陀螺仪在测量过程中容易产生漂移的问题,将卡尔曼算法
应用于陀螺仪的漂移补偿中.分析了陀螺仪误差源,建立了陀螺仪误差模型,提出了用
卡尔曼滤波算法处理陀螺仪零点随机误差的方法,通过运用Allan方差分析法评价
了卡尔曼滤波效果;最后,在转速测试平台上进行了陀螺仪测量试验.研究结果表明,
通过建立误差模型和采用卡尔曼滤波算法能有效减小陀螺仪测量过程中的漂移.
【总页数】4页(P311-313,321)
【作 者】陈晨;赵文宏;徐慧鑫;周芬芬;安平
【作者单位】浙江工业大学超精密加工实验室,浙江杭州310014
【正文语种】中 文
【中图分类】TH161+.7;TH89
【相关文献】
1.基于卡尔曼滤波算法的MEMS陀螺仪误差补偿研究 [J], 徐韩;曾超;黄清华
2.基于相关向量机的MEMS陀螺仪随机漂移补偿 [J], 沈强;刘洁瑜;王琪;王杰飞
3.基于支持向量机的MEMS陀螺仪随机漂移补偿 [J], 李泽民;段凤阳;马佳智
4.基于时间序列分析的Kalman滤波方法在MEMS陀螺仪随机漂移误差补偿中的
应用研究 [J], 李杰;张文栋;刘俊
5.基于时间序列分析的Kalman滤波方法在MEMS陀螺仪随机漂移误差补偿中的
应用研究 [J], 李杰;张文栋;刘俊
因版权原因,仅展示原文概要,查看原文内容请购买