激光陀螺仪误差分析与补偿技术
- 格式:pptx
- 大小:520.85 KB
- 文档页数:20
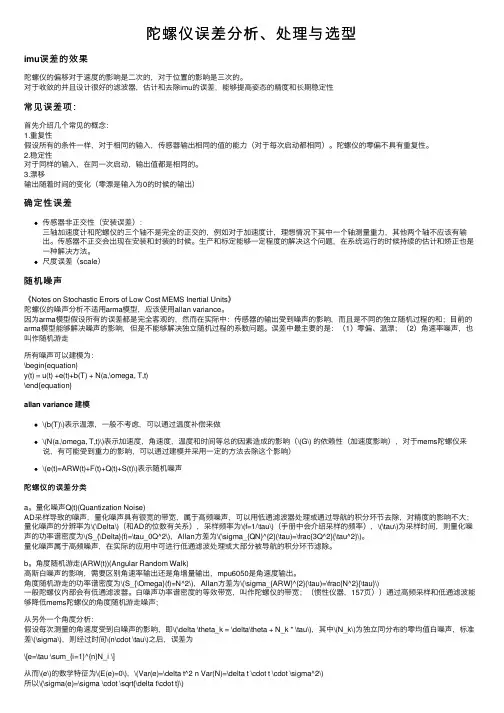
陀螺仪误差分析、处理与选型imu误差的效果陀螺仪的偏移对于速度的影响是⼆次的,对于位置的影响是三次的。
对于收敛的并且设计很好的滤波器,估计和去除imu的误差,能够提⾼姿态的精度和长期稳定性常见误差项:⾸先介绍⼏个常见的概念:1.重复性假设所有的条件⼀样,对于相同的输⼊,传感器输出相同的值的能⼒(对于每次启动都相同)。
陀螺仪的零偏不具有重复性。
2.稳定性对于同样的输⼊,在同⼀次启动,输出值都是相同的。
3.漂移输出随着时间的变化(零漂是输⼊为0的时候的输出)确定性误差传感器⾮正交性(安装误差):三轴加速度计和陀螺仪的三个轴不是完全的正交的,例如对于加速度计,理想情况下其中⼀个轴测量重⼒,其他两个轴不应该有输出。
传感器不正交会出现在安装和封装的时候。
⽣产和标定能够⼀定程度的解决这个问题,在系统运⾏的时候持续的估计和矫正也是⼀种解决⽅法。
尺度误差(scale)随机噪声《Notes on Stochastic Errors of Low Cost MEMS Inertial Units》陀螺仪的噪声分析不适⽤arma模型,应该使⽤allan variance。
因为arma模型假设所有的误差都是完全客观的,然⽽在实际中:传感器的输出受到噪声的影响,⽽且是不同的独⽴随机过程的和;⽬前的arma模型能够解决噪声的影响,但是不能够解决独⽴随机过程的系数问题。
误差中最主要的是:(1)零偏、温漂;(2)⾓速率噪声,也叫作随机游⾛所有噪声可以建模为:\begin{equation}y(t) = u(t) +e(t)+b(T) + N(a,\omega, T,t)\end{equation}allan variance 建模\(b(T)\)表⽰温漂,⼀般不考虑,可以通过温度补偿来做\(N(a,\omega, T,t)\)表⽰加速度,⾓速度,温度和时间等总的因素造成的影响(\(G\) 的依赖性(加速度影响),对于mems陀螺仪来说,有可能受到重⼒的影响,可以通过建模并采⽤⼀定的⽅法去除这个影响)\(e(t)=ARW(t)+F(t)+Q(t)+S(t)\)表⽰随机噪声陀螺仪的误差分类a。
舰用高精度激光陀螺惯导内杆臂误差分析及补偿方法研究周冉辉【摘要】For high-precision rotary laser gyro inertial navigation systems (RINS), inertial instruments errors are most able Inertial Measurement Unit (IMU) rotating modulation off, an error in the arm not only can't be modulated out, but because the error introduced into the IMU rotation system registration and navigation. Based on this, the internal lever arm error analysis and modeling, detailed pushed to the mathematical expression in the lever arm and the navigation error speed error between. Through analysis identified within the lever arm length and frequency of vibration are two factors that affect the inner lever arm error, and error compensation method is proposed based on internal lever arm length. Finally, within the experimental error of the lever arm model and compensation methods of this study were verified.%对于高精度激光陀螺旋转惯导系统,大部分惯性器件误差都能够通过惯性测量单元( IMU)旋转而调制掉,内杆臂误差不仅不能够被调制掉,反而因为 IMU旋转将误差引入到系统对准和导航过程中。

陀螺经纬仪定向的误差分析及导线平差摘 要:井下经纬仪导线通常是由井底车场开始的向井田边界推进的,根据误差累计原理,导线点位的误差离井底车场越远误差越大。
利用陀螺经纬仪定向时,对其进行误差分析及平差,能有效地控制误差,并提供最优定向法!关键词:陀螺经纬仪;定向误差;导线平差1 陀螺经纬仪定向的精度平定陀螺经纬仪的定向精度主要以陀螺方位角一次测定中误差m T 和一次定向中误差m α表示。
1.1 陀螺方位角一次测定中误差在待定边进行陀螺定向前,陀螺仪需在地面已知坐标方位角边上 测定仪器常数△。
按《煤矿测量规程》规定,前后共需测4~6次,这样就可按白赛尔公式求算陀螺方位角一次测定中误差,即仪器常数一次测定中误差(简称一次测定中误差)为:[]1vv n ±∆- 式中 v i —仪器常数的平均值与各次仪器常数的差值;n △—测定仪器常数的次数。
则测定仪器常数平均值的中误差为:m △平= m T 平=mT n ±∆1.2 一次定向中误差一次定向中误差可按下式计算:式中 —仪器常数平均中误差; —待定边陀螺方位角平均值中误差;m α= 222·m m T m λ∆±平+平+—确定子午线收敛角的中误差。
因确定子午线收敛角的误差m γ较小,可以忽略不计,故上式可写为:m α= 22·m T m ∆±平+平 2 陀螺经纬仪一次测定方位角的中误差分析如前所述,陀螺经纬仪的测量精度,以陀螺方位角一次测定中误差表示。
不同的定向方法,其误差来源也有差异。
目前国内最常用的是跟踪逆转点法和中天法,其中所用的一些数据是根据具体的仪器试验分析所得,有一定得局限性,但对掌握误差分析方法而言,却是无关紧要的。
2.1 跟踪逆转点法定向时的误差分析以JT 15型陀螺经纬仪为例进行探讨。
按跟踪逆转点法进行陀螺定向时,主要误差来源有:①经纬仪测定方向的误差;②上架式陀螺仪与经纬仪的连接误差;③悬挂带零位变动误差;④灵敏部摆动平衡位置的变动误差;⑤外界条件,如风流、气温及震动等因素的影响。

速率偏频激光陀螺惯导系统航向敏感误差分析与补偿江一夫;李四海;徐兵华;严恭敏【摘要】为了有针对性的消除激光陀螺速率偏频惯导系统的可补偿寻北误差,进一步提高航向精度,从速率偏频斜装惯性仪表的数学模型出发,对陀螺和加速度计的各项误差进行了寻北误差分析,基于捷联惯导对准误差公式给出了惯性仪表各误差源的影响量级.明确了引起倾斜状态航向敏感误差的主要因素,提出了以调整激光陀螺旋转轴方向陀螺零偏抵消激光陀螺标度因数不对称性误差或者速率偏频状态陀螺零位偏移的航向敏感误差补偿措施.经转台试验验证,该措施简单可靠,有效消除了倾斜状态航向敏感误差,速率偏频系统的全方位寻北精度能够从86″(3σ)提高到优于40″(3σ).【期刊名称】《中国惯性技术学报》【年(卷),期】2018(026)005【总页数】6页(P561-566)【关键词】寻北;航向敏感误差;激光陀螺;速率偏频【作者】江一夫;李四海;徐兵华;严恭敏【作者单位】西北工业大学自动化学院,西安 710029;西安航天精密机电研究所,西安 710100;西北工业大学自动化学院,西安 710029;西北工业大学自动化学院,西安710029;西安航天精密机电研究所,西安 710100;西北工业大学自动化学院,西安710029【正文语种】中文【中图分类】U666.1与机抖偏频一样,速率偏频技术是解决激光陀螺锁区问题的另外一种方式。
速率偏频要求激光陀螺敏感到持续的旋转角速度,因此可以与旋转调制技术复合利用同一转位机构,既可以避免机抖偏频频繁过死区产生的额外随机游走误差又实现了随机常值零偏的自补偿[1-3],既可以发掘出激光陀螺的极限性能又没有额外增加硬件成本,是实现高精度自对准的绝佳途径。
惯性导航领域中将方位相关的寻北误差,归结为航向敏感误差(Heading-Sensitive Error, HSE)。
航向敏感误差主要与多位置系统参数不一致,磁场、温度场不均匀等因素有关,在平台惯导系统中一般采用最小二乘模型参数拟合和分段插值补偿的方法[4]。
激光陀螺捷联惯导中陀螺比例因子误差补偿技术冯鸿奎;钟德安;战德军;邹春华;刘扬【摘要】为了提高激光陀螺捷联惯性导航系统的导航精度,对激光陀螺的原理进行了分析和说明,重点对影响陀螺比例因子误差因素进行分析,在此基础上建立了误差补偿的精确数学模型,并针对某型激光陀螺进行了误差分析。
分析结果表明,惯导系统激光陀螺的比例因子与材料介质、温度、腔长等相关,除了采用稳频技术,还需要采用旋转调制技术提高测量数据精度。
转台仿真和实际测试结果证明,该比例因子修正的方法方便、可靠,姿态精度可提高约8.7",对提高惯导测量精度具有重要意义。
%To improve the navigation precision of laser gyro strapdown inertial navigation system ( SINS ) , this paper emphasizes the factor analysis of laser gyro scale factor,and builds the exact mathematical mod-els. Scale factor of a laser gyro is correlated with its material,temperature and field length. Analysis shows that the performance of frequency stabilization and reciprocator rotation is optimal. Table simulations and sailing experiments show that this technology is convenient,and the attitude precison can be improved by a-bout 8. 7". It is meaningful for improving the measurement precison of SINS.【期刊名称】《电讯技术》【年(卷),期】2013(000)012【总页数】4页(P1559-1562)【关键词】捷联惯性导航系统;激光陀螺;比例因子;误差补偿;单轴旋转【作者】冯鸿奎;钟德安;战德军;邹春华;刘扬【作者单位】中国卫星海上测控部,江苏江阴214431;中国卫星海上测控部,江苏江阴214431;中国卫星海上测控部,江苏江阴214431; 国防科技大学光电科学与工程学院,长沙410073;中国卫星海上测控部,江苏江阴214431;中国卫星海上测控部,江苏江阴214431【正文语种】中文【中图分类】TN965;V249.32近年来,随着惯性器件的发展,激光陀螺的优势越来越明显。
光纤陀螺仪的误差分析目前光纤陀螺的研究和应用中还存在着一些关键技术需要作进一步的深入研究。
最突出的问题就是存在许多难以解决的误差源。
一、光纤陀螺仪的分类光纤陀螺按其光学工作原理可分为三类:1、干涉式光纤陀螺(IFOG)2、谐振式光纤头陀螺(RFOG)3、受激布里渊散射式光纤陀螺(BFOG)其中干涉式光纤陀螺技术已完全成熟并产业化,而谐振式光纤陀螺和受激式布里渊散射式光纤陀螺还处于基础研究阶段,尚有许多问题需要进一步探索。
所以这里主要探讨干涉式光纤陀螺的误差分析。
二、干涉式光纤陀螺原理干涉式光纤陀螺的主体是一个萨格奈克(Sagnac)干涉仪,由宽带光源(如超发光二极管或光纤光源)、光纤耦合器、光探测器、Y分支多功能集成光学芯片和光纤线圈组成,其原理基于萨格奈克效应:当陀螺旋转时,光纤线圈内沿顺时针和逆时针方向传播的两束广波之间产生一个与旋转角速率成正比的相位差:式中:R为光纤线圈的半径;L为光纤长度;为光源平均波长;c为真空中的光速。
图1 干涉式光纤陀螺的机构组成三、光纤陀螺的噪声来源由于环境及光纤陀螺本身的各种噪声源的影响,光纤陀螺输出信号中存在着各种随机误差项。
为了减少光纤陀螺的误差并提高其精度,需要对其进行性能评价,辨识出影响其精度的主要误差源,以便进一步采取措施消除相关的随机误差。
在实际系统中,萨格纳克效应非常微弱,构成光纤陀螺的每个元件都可能是噪声源,而且存在各种各样的寄生效应,它们都将引起陀螺输出漂移和标度因数的不稳定性,从而影响光纤陀螺的性能。
主要误差源1.光源噪声光源是干涉仪的关键组件,光源的波长变化、频谱分布变化、输出光功率的波动、返回光的干扰,都将直接影响干涉的效果。
另外,返回到光源的光直接干扰了它的发射状态,引起二次激发,与信号光产生二次干涉,并引起发光强度和波长的波动。
(1)光源的波长变化的影响可通过信号处理的方法加以解决。
若波长变化是由温度变化引起,则可直接测量温度而校正波长,否则,必须测量波长进行校正。
光纤陀螺温度效应误差及其补偿技术研究温度效应误差是目前制约光纤陀螺高精度应用的瓶颈之一。
文中分析了光纤陀螺温度效应的成因及影响机理,介绍了温度效应误差补偿技术的研究现状,重点阐述了一种基于误差建模的软件补偿方法。
该方法建立了以温度、温度变化率和温度梯度为变量的误差模型,使用温循实验数据进行模型参数拟合,通过DSP 技术在系统中实现了对温度效应误差的补偿。
仿真试验结果表明,使用该方法可以将某型光纤陀螺的温度效应误差降低约一个数量级。
标签:光纤陀螺;温度效应误差;误差建模经过几十年发展,光纤陀螺加工工艺逐渐成熟,潜在优势日益显现,已经成为新一代惯性导航系统中的理想器件[1]。
目前,光纤陀螺面临着高精度的发展要求。
而温度效应在很大程度上增大了光纤陀螺的输出漂移,是制约其高精度工程应用的瓶颈。
文章通过对光纤陀螺温度效应误差成因与机理的分析,结合国内外温度误差补偿技术的研究现状,提出了一种基于误差建模的软件补偿方法。
仿真试验表明,该方法能有效抑制温度效应对光纤陀螺精度的影响。
1 光纤陀螺温度效应误差分析温度效应是光纤陀螺的重要误差源之一,主要是指温度条件变化导致光纤陀螺输出漂移的现象。
引发温度效应的热量来源主要有两个:一是工作时陀螺各个元器件的自身产热;二是外界温度环境的影响[2]。
光纤陀螺内部(核心器件是光纤环)的温度是这两个热源综合作用的结果。
开机后的一段时间内,光纤陀螺自身产热导致的升温效应较为显著,器件内部的温度持续上升,直至产生的热量与散失的热量基本相当,形成动态平衡。
之后,外部温度环境的影响占主导作用。
在实际的工作环境中,陀螺外部的温度环境始终在变化,陀螺内部很难形成稳定不变的温度场,温度效应误差始终存在。
光纤陀螺内部受温度影响的元器件较多,温度效应可以看成多种相关因素共同作用的结果[3]。
光纤陀螺系统由光路与电路两部分组成:光路部分包括光纤环、光源、Y波导、耦合器和光电探测器;电路部分包括光源驱动电路和信号处理电路[4]。
光纤陀螺仪的误差分析目前光纤陀螺的研究和应用中还存在着一些关键技术需要作进一步的深入研究。
最突出的问题就是存在许多难以解决的误差源。
一、光纤陀螺仪的分类光纤陀螺按其光学工作原理可分为三类:1、干涉式光纤陀螺(IFOG)2、谐振式光纤头陀螺(RFOG)3、受激布里渊散射式光纤陀螺(BFOG)其中干涉式光纤陀螺技术已完全成熟并产业化,而谐振式光纤陀螺和受激式布里渊散射式光纤陀螺还处于基础研究阶段,尚有许多问题需要进一步探索。
所以这里主要探讨干涉式光纤陀螺的误差分析。
二、干涉式光纤陀螺原理干涉式光纤陀螺的主体是一个萨格奈克(Sagnac)干涉仪,由宽带光源(如超发光二极管或光纤光源)、光纤耦合器、光探测器、Y分支多功能集成光学芯片和光纤线圈组成,其原理基于萨格奈克效应:当陀螺旋转时,光纤线圈内沿顺时针和逆时针方向传播的两束广波之间产生一个与旋转角速率成正比的相位差:式中:R为光纤线圈的半径;L为光纤长度;为光源平均波长;c为真空中的光速。
图1 干涉式光纤陀螺的机构组成三、光纤陀螺的噪声来源由于环境及光纤陀螺本身的各种噪声源的影响,光纤陀螺输出信号中存在着各种随机误差项。
为了减少光纤陀螺的误差并提高其精度,需要对其进行性能评价,辨识出影响其精度的主要误差源,以便进一步采取措施消除相关的随机误差。
在实际系统中,萨格纳克效应非常微弱,构成光纤陀螺的每个元件都可能是噪声源,而且存在各种各样的寄生效应,它们都将引起陀螺输出漂移和标度因数的不稳定性,从而影响光纤陀螺的性能。
主要误差源1.光源噪声光源是干涉仪的关键组件,光源的波长变化、频谱分布变化、输出光功率的波动、返回光的干扰,都将直接影响干涉的效果。
另外,返回到光源的光直接干扰了它的发射状态,引起二次激发,与信号光产生二次干涉,并引起发光强度和波长的波动。
(1)光源的波长变化的影响可通过信号处理的方法加以解决。
若波长变化是由温度变化引起,则可直接测量温度而校正波长,否则,必须测量波长进行校正。