第5章多自由度系统的数值计算方法
- 格式:ppt
- 大小:458.00 KB
- 文档页数:14

第5章两自由度系统的振动应用单自由度系统的振动理论 ,可以解决机械振动中的一些问题。
但是,工程中有很多实际问题必须简化成两个或两个以上自由度,即多自由度的系统,才能描述其机械振动的主要特征。
多自由度系统的振动特性与单自由度系统的振动特性有较大的差别 ,例如,有多个固有频率、主振型、主振动和多个共振频率等。
本章主要介绍研究两 自由度系统机械振动的基本方法 。
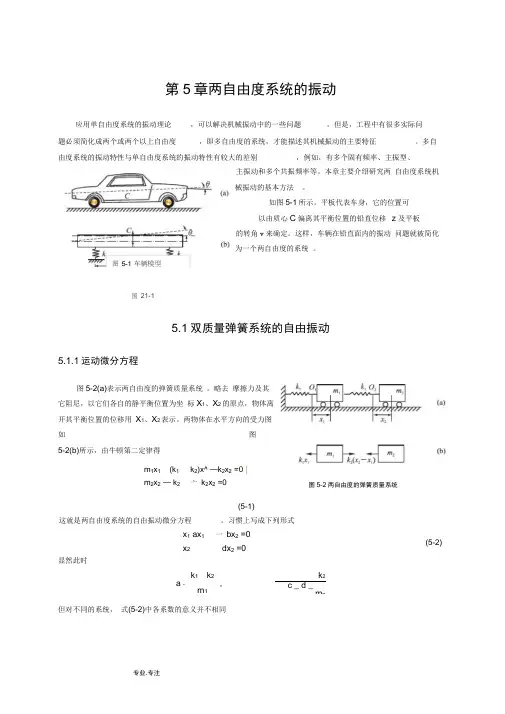
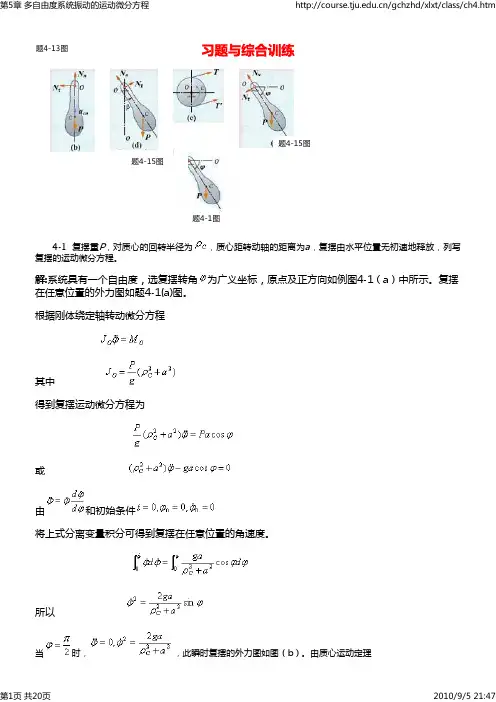
如图5-1所示。
平板代表车身,它的位置可 以由质心C 偏离其平衡位置的铅直位移 z 及平板的转角v 来确定。
这样,车辆在铅直面内的振动 问题就被简化为一个两自由度的系统 。
国 21-15.1双质量弹簧系统的自由振动5.1.1运动微分方程图5-2(a)表示两自由度的弹簧质量系统 。
略去 摩擦力及其它阻尼,以它们各自的静平衡位置为坐 标X 1、X 2的原点,物体离开其平衡位置的位移用 X 1、X 2表示。
两物体在水平方向的受力图如图5-2(b)所示,由牛顿第二定律得m 1x 1 (k 1k 2)x^ —k 2x 2 =0 |m 2x 2 — k 2 亠 k 2x 2 =0(5-1)显然此时k 1 k 2 a -,m 1k 2c _d _m 2但对不同的系统, 式(5-2)中各系数的意义并不相同这就是两自由度系统的自由振动微分方程。
习惯上写成下列形式 x 1 ax 1x 2 一 bx 2 =0dx 2 =0(5-2)图5-2两自由度的弹簧质量系统(5-7)由于式(5-7)确定的p 2的两个正实根仅取决于系统本身的物理性质,与运动的初始条件无关,因此p 称为系统的固有频率。
较小的一个称为第一阶固有频率,较大的一个称为第二阶固有频率5.2.2 主振型将固有频率P 1和P 2分别代入式(5-5)的任一式,可得到对应于它们的振幅比5.1.2固有频率和主振型根据微分方程的理论,设方程(5-2)的解,即两自由度无阻尼自由振动系统的解为 x^ A 1 sin( pt亠二)x 2 = A 2 sin( pt 亠::£)(5-3)或写成以下的矩阵形式X 1A 1T网 n(pt+ot)(5-4)X 2将式(5-4)代入式(5-2),可得代数齐次方程组-b-p _| !.A 2(5-5)保证式(5-5)具有非零解的充分必要条件是式(5-5)的系数行列式等于零,即展开后为纠 p 2)=-b d - p 2p 4 -(a d)p 2 ad -be =0(5-6)式(5-6)唯一确定了频率p 满足的条件,通常称为频率分程或特征方程。
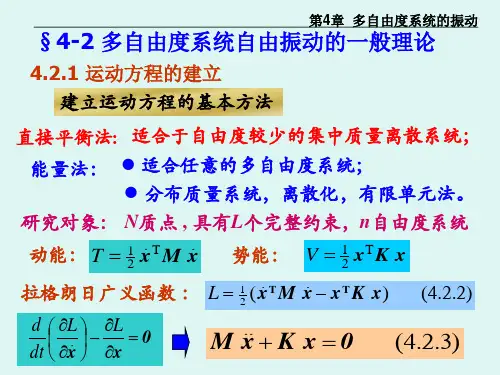
多自由度系统的运动微分方程牛顿第二定律矢量建模方法 影响系数法•刚度影响系数法•柔度影响系数法Lagrange方程方法•约束、自由度与广义坐标•Lagrange方程建模方法多自由度系统的运动微分方程牛顿第二定律建模多自由度系统的运动微分方程--牛顿第二定律建模以1m 为研究对象,有()())(1122111221111t F x x c x c x x k x k xm +−+−−+−=&&&&& (1) 以2m 为研究对象,有()())(2232321221212t F x c x k x x c x x k xm +−−−+−=&&&&& (2)将方程(1)、(2)整理可得多自由度系统的运动微分方程--牛顿第二定律建模()[]()[])(1221212212111t F x k x k k x c x c c xm =−++−++&&&& (3) ()[]()[])(2232122321212t F x k k x k x c c x c xm =++−+++−+&&&& (4) 将方程(3)、(4)写成矩阵形式⎭⎬⎫⎩⎨⎧=⎭⎬⎫⎩⎨⎧⎥⎦⎤⎢⎣⎡+−−++⎭⎬⎫⎩⎨⎧⎥⎦⎤⎢⎣⎡+−−++⎭⎬⎫⎩⎨⎧⎥⎦⎤⎢⎣⎡)()(002121322221213222212121t F t F x x k k k k k k x xc c c c c c x x m m &&&&&&即)(t F kx x C xM =++&&& 多自由度系统的运动微分方程--牛顿第二定律建模这种用矩阵写出的运动微分方程与单自由度系统的运动微分方程非常相似。
象例题中在各个离散质量上建立的坐标系为描述系统的物理坐标系,在此坐标下的系统质量矩阵、阻尼矩阵和刚度矩阵为系统的物理参数。
第五章两自由度系统振动§5-1 概述单自由度系统的振动理论是振动理论的基础。
在实际工程问题中,还经常会遇到一些不能简化为单自由度系统的振动问题,因此有必要进一步研究多自由度系统的振动理论。
两自由度系统是最简单的多自由度系统。
从单自由度系统到两自由度系统,振动的性质和研究的方法有质的不同。
研究两自由度系统是分析和掌握多自由度系统振动特性的基础。
所谓两自由度系统是指要用两个独立坐标才能确定系统在振动过程中任何瞬时的几何位置的振动系统。
很多生产实际中的问题都可以简化为两自由度的振动系统。
①汽车动力学模型:图3.1两自由度汽车动力学模型§5-2 两自由度系统的自由振动一、系统的运动微分方程②以图3.2的双弹簧质量系统为例。
设弹簧的刚度分别为k 1和k 2,质量为m 1、m 2。
质量的位移分别用x 1和x 2来表示,并以静平衡位置为坐标原点,以向下为正方向。
(分析)在振动过程中的任一瞬间t ,m 1和m 2的位移分别为x 1及x 2。
此时,在质量m 1上作用有弹性恢复力()12211x x k x k -及,在质量m 2上作用有弹性恢复力()122x x k -。
这些力的作用方向如图所示。
应用牛顿运动定律,可建立该系统的振动微分方程式:()()⎭⎬⎫=-+=--+00122221221111x x k x m x x k x k xm (3.1)令2212121,,m k c m k b m k k a ==+=则(3.1)式可改写成如下形式:()()⎭⎬⎫=-+=--+00122221221111x x k x m x x k x k xm⎭⎬⎫=+-=-+00212211cx cx xbx ax x(3.2) 这是一个二阶常系数线性齐次联立微分方程组。
(分析)在第一个方程中包含2bx -项,第二个方程中则包含1cx -项,称为“耦合项”(coupling term )。
这表明,质量m 1除受到弹簧k 1的恢复力的作用外,还受到弹簧 k 2的恢复力的作用。
第一章 单自由度系统1.1 总结求单自由度系统固有频率的方法和步骤。
单自由度系统固有频率求法有:牛顿第二定律法、动量距定理法、拉格朗日方程法和能量守恒定理法。
1、 牛顿第二定律法适用范围:所有的单自由度系统的振动。
解题步骤:(1) 对系统进行受力分析,得到系统所受的合力;(2) 利用牛顿第二定律∑=F x m,得到系统的运动微分方程;(3) 求解该方程所对应的特征方程的特征根,得到该系统的固有频率。
2、 动量距定理法适用范围:绕定轴转动的单自由度系统的振动。
解题步骤:(1) 对系统进行受力分析和动量距分析;(2) 利用动量距定理J ∑=M θ,得到系统的运动微分方程;(3) 求解该方程所对应的特征方程的特征根,得到该系统的固有频率。
3、 拉格朗日方程法:适用范围:所有的单自由度系统的振动。
解题步骤:(1)设系统的广义坐标为θ,写出系统对于坐标θ的动能T 和势能U 的表达式;进一步写求出拉格朗日函数的表达式:L=T-U ; (2)由格朗日方程θθ∂∂-∂∂∂LL dt )( =0,得到系统的运动微分方程; (3) 求解该方程所对应的特征方程的特征根,得到该系统的固有频率。
4、 能量守恒定理法适用范围:所有无阻尼的单自由度保守系统的振动。
解题步骤:(1)对系统进行运动分析、选广义坐标、写出在该坐标下系统的动能T 和势能U 的表达式;进一步写出机械能守恒定理的表达式 T+U=Const (2)将能量守恒定理T+U=Const 对时间求导得零,即0)(=+dtU T d ,进一步得到系统的运动微分方程;(3) 求解该方程所对应的特征方程的特征根,得到该系统的固有频率。
1.2 叙述用衰减法求单自由度系统阻尼比的方法和步骤。
用衰减法求单自由度系统阻尼比的方法有两个:衰减曲线法和共振法。
方法一:衰减曲线法。
求解步骤:(1)利用试验测得单自由度系统的衰减振动曲线,并测得周期和相邻波峰和波谷的幅值i A 、1+i A 。