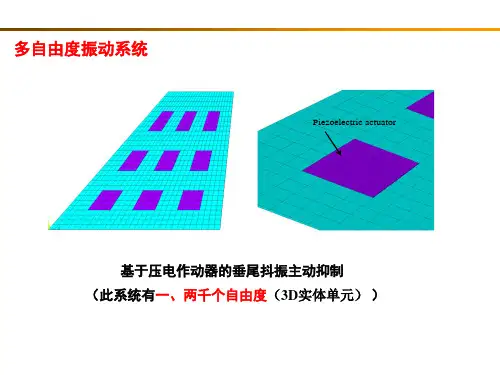
多自由度系统的运动方程
- 格式:pdf
- 大小:5.36 MB
- 文档页数:39
船体振动基础1第章多自由度系统的振第2章多自由度系统的振动一、引言二、两自由度系统的振动三、多自由度系统的振动四、振动方程建立的其他方法2有阻尼的多自由度系统振动1、拉格朗日方程式1、拉格朗日方程式P38拉格朗日法是建立微分方程一种简单的方法:先求出系统的动能、势能,进而得出质量矩阵和刚度矩阵.优点:系统的动能和势能都是标量,无需考虑力的方向。
141、拉格朗日方程式P38拉格朗日第二类方程式适用于完整约束的系统。
完整约束完整约束:当约束方程本身或约束方程通过积分后可以下式所示的形式表示时,称为完整约束。
不完整约束:当约束方程本含有不能积分的速度项时,系统的约束称为不完整约束。
具有不完整约束的系统,系统的自由度不等于广义坐标数自由度数小于广义坐标数于广义坐标数,自由度数小于广义坐标数。
151、拉格朗日方程式P3811•位移方程和柔度矩阵P40对于静定结构,有时通过柔度矩阵建立位移方程比通过对于静定结构有时通过m1x1x2以准静态方式作用在梁上。
梁只产生位移(即挠度),不产生加速度。
的静平衡位置为坐标P1=1 f11 f21 f12P2=1 f22(1)P1 = 1、P2 = 0 时 m1 位移:x1 = f11 m2 位移:x2 = f 21 (3)P1、P2 同时作用 m1 位移: 位移 x1 = f11 P 1 + f12 P 2 m2 位移:x2 = f 21 P 1 + f 22 P 2(2)P1 = 0、P2 = 1 时 m1 位移:x1 = f12 m2 位移:x2 = f 22P1 m1 x1 x2 P2 m2P1=1 f11 f21 f12 P1 m1 x1P2=1 f22 P2 m2 x2P 同时作用时 1、P 2 同时作用时:x1 = f11P 1 + f12 P 2 x2 = f 21P 1 + f 22 P 2矩阵形式 X = FP 矩阵形式:⎡ x1 ⎤ X =⎢ ⎥ ⎣ x2 ⎦f ij 柔度影响系数f12 ⎤ f 22 ⎥ ⎦⎡ f11 F=⎢ ⎣ f 21⎡P 1⎤ P=⎢ ⎥ ⎣ P2 ⎦物理意义: 系统仅在第 j 个坐标受到 单位力作用时相应于第 i 个坐标上产生的位移柔度矩阵P1 m1 x1P2 m2 x2P1(t) m1 m2P2(t)&1 m1 & x&2 m2 & xX = FP⎡ x1 ⎤ ⎡ f11 ⎢x ⎥ = ⎢ f ⎣ 2 ⎦ ⎣ 21 f12 ⎤ ⎡ P 1⎤ ⎢P ⎥ f 22 ⎥ ⎦⎣ 2 ⎦当P 1、P 2 是动载荷时 集中质量上有惯性力存在⎡ x1 ⎤ ⎡ f11 ⎢x ⎥ = ⎢ f ⎣ 2 ⎦ ⎣ 21 f12 ⎤ ⎡ P && 1 (t ) − m1 x1 ⎤ ⎢ P (t ) − m & ⎥ f 22 ⎥ & x 2 2⎦ ⎦⎣ 2⎡ x1 ⎤ ⎡ f 11 ⎢x ⎥ = ⎢ f ⎣ 2 ⎦ ⎣ 21位移方程:f 12 ⎤⎛ ⎡ P1 (t ) ⎤ ⎡m1 ⎜⎢ −⎢ ⎥ ⎥ ⎜ f 22 ⎦⎝ ⎣ P2 (t ) ⎦ ⎣ 0&1 ⎤ ⎞ 0 ⎤⎡ & x ⎟ ⎥ ⎢ ⎥ &2 ⎦ ⎟ m2 ⎦ ⎣ & x ⎠&& ) X = F ( P − MXP1(t) m1 m2P2(t)⎡ x1 ⎤ X =⎢ ⎥ ⎣ x2 ⎦⎡P 1 (t ) ⎤ P=⎢ ⎥ P ( t ) ⎣ 2 ⎦&1 m1 & x&2 m2 & x位移方程 位移方程:&& ) X = F ( P − MX也可按作用力方程建立方程:&& + KX = P MX刚度矩阵&& + X = FP FMX柔度矩阵与刚度矩阵的关系 柔度矩阵与刚度矩阵的关系:&& KX = P − MX若K非奇异F=K−1FK = I&& ) X = K −1 ( P − MX应当注意:对于允许刚体运动产生的系统(即具有刚体自由度的系统) , 柔度矩阵不存在。
多自由度体系在地面运动作用下的振动方程我们要找出多自由度体系在地面运动作用下的振动方程。
首先,我们需要了解多自由度体系的振动方程的基本形式。
多自由度体系的振动方程通常由以下形式给出:
M{ddot x} + C{dot x} + Kx = F(t)
其中:
M 是质量矩阵,
C 是阻尼矩阵,
K 是刚度矩阵,
x 是位移向量,
{dot x} 是速度向量,
{ddot x} 是加速度向量,
F(t) 是外部作用力向量。
对于地面运动作用下的振动,我们需要考虑地面的运动对体系的影响。
假设地面以速度 v 和加速度 a 运动,那么地面的运动可以表示为:
x_ground = vt + at^2
其中 x_ground 是地面的位移。
由于地面和体系是相互作用的,我们需要将地面的位移和加速度引入到振动方程中。
具体来说,我们需要将地面的位移和加速度作为外部作用力加入到方程的右边。
因此,多自由度体系在地面运动作用下的振动方程为:
M{ddot x} + C{dot x} + Kx = -Kx_ground
其中 x_ground 是地面的位移,由地面的速度和加速度决定。
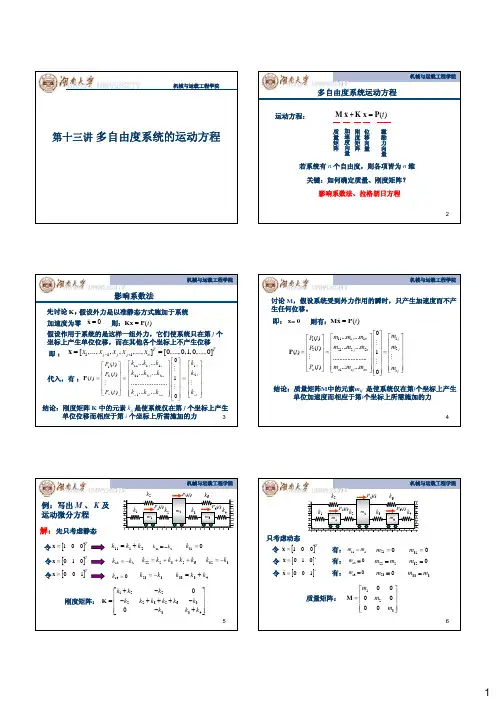
4.1 多自由度系统的数学描述一、用柔度系数法和刚度系数法表示的运动方程下面以图4-1的系统为例说明多自由度系统的柔度系数及柔度矩阵。
柔度矩阵所谓柔度是指单位外“力”所引起的系统的“位移”。
具体地说,系统第个坐标上作用的单位力在第个坐标上所引起的位移就定义为柔度系数r。
如在图4-1系统中,设在质量上沿方向作用一单位力,系统相应于它产生的位移为按柔度系数的定义,就有同理,一个自由度的系统一共有个独立坐标,对应于每个单位力就有个柔度系数;总共有个单位力,故系统总共有个柔度系数(。
它们组成一个柔度矩阵(4-1)假设在系统的各个坐标上分别作用有力,则由叠加原理,系统的各个位移可表示为写成矩阵表式,有(4-2)其中与分别代表位移列阵和力列阵:也就是说,系统的位移列阵就等于系统的柔度矩阵与力列阵的乘积。
方程(4-2)称为位移方程。
应注意,本书中的“力”与“位移”都是指广义的,“力”可以是力,也可以是力偶;而“位移”可以是线位移,也可以是角位移,等等。
下面举例说明怎样求系统的柔度矩阵。
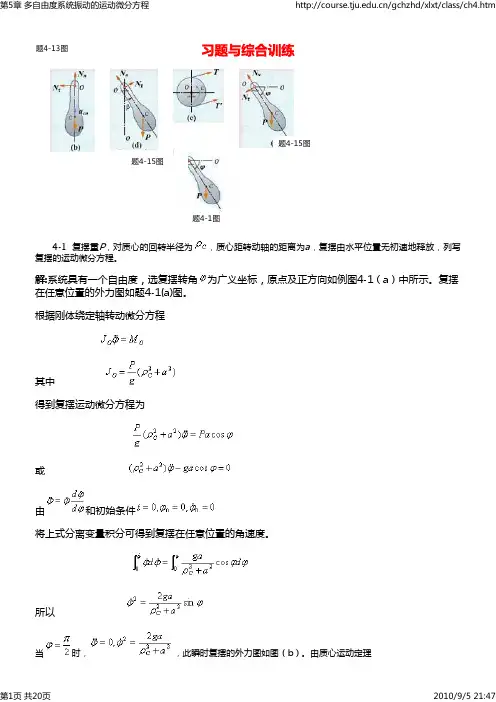
例4-1 设有集中质量与以及长为与的无重刚杆构成的复合摆,如图4-2所示,假定摆在其铅垂稳定平衡位置附近作微振动。
取质量与的水平位置与作为坐标,求系统的柔度矩阵。
解:先仅在上作用一单位水平力。
由静力平衡条件可得:因而有再仅在上作用一单位水平力。
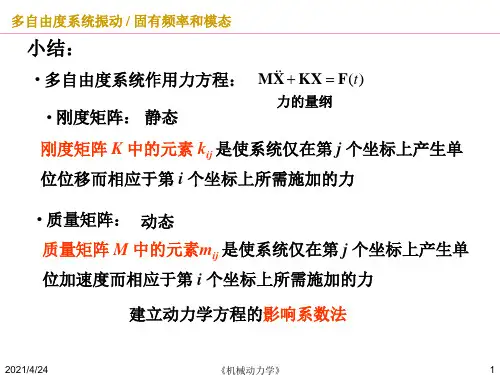
由静力平衡条件有:考虑到可得故系统的柔度矩阵为刚度矩阵所谓刚度是指产生单位“位移”所需的各个外加“力”。
具体地说使系统仅仅在第个坐标上产生单位位移,就需要在各个坐标方向分别加上适当的力,而在第个坐标上所需加的外力,就定义为刚度系数。
一个自由度系统有个独立的坐标,对应着个单位位移,而每个单位位移又对应着个刚度系数;所以系统总共有个刚度系数,它们组成一个刚度矩阵(4-3)例如在图4-1系统中,设有这时,弹簧与没有变形,而弹簧伸长了单位长度,作用于质量上的弹簧力为(向右为正),而作用于质量上的弹簧力为-(向左为负)。
多自由度的广义拉格朗日方程广义拉格朗日方程是描述物理系统运动规律的重要数学工具,它可以同时考虑系统中的多自由度,从而更全面地解释和预测系统的运动。
在广义拉格朗日力学中,自由度是指描述系统状态所需的独立变量个数。
对于 N 自由度的系统,我们需要 N 个广义坐标来完全描述其状态。
这些广义坐标可以是位置坐标、角度、形状参数等,但通常是与系统的运动有关的变量。
在广义拉格朗日力学中,拉格朗日函数 L 是一个与广义坐标和广义速度有关的函数,用来描述系统的动能和势能。
一般形式的拉格朗日函数可以写成 L = T - V,其中 T 表示系统的动能,V 表示系统的势能。
多自由度的广义拉格朗日方程可以从 Hamilton 原理出发推导得到。
根据 Hamilton 原理,系统在保持广义坐标和广义速度固定的条件下,其真实轨迹使得作用量 S 取驻值。
作用量 S 定义为S = ∫L dt,其中积分是在起始时间点到终止时间点之间进行的。
对于多自由度的情况,为了将广义坐标和广义速度引入到广义拉格朗日方程中,我们需要引入约束条件。
约束条件可以是完整约束(等式约束)或非完整约束(不等式约束),用来限制系统的自由度。
通过拉格朗日乘子法,我们可以将约束条件融入拉格朗日函数中,进而得到考虑约束情况下的广义拉格朗日方程。
对于 N 自由度的系统,广义拉格朗日方程可以表示为:d/dt (∂L/∂qᵢ) - (∂L/∂qᵢ) = Qᵢ (其中 i = 1, 2, ..., N)其中(∂L/∂qᵢ) 表示拉格朗日函数 L 对广义坐标 qᵢ的偏导数,Qᵢ表示系统所受到的广义力。
通过求解这个方程组,我们可以得到系统的运动方程,从而完整地描述多自由度系统的运动规律。
这些运动方程可以通过数值模拟或解析的手段进行求解,从而预测系统在不同条件下的运动行为。
总结起来,多自由度的广义拉格朗日方程是可以用来描述多自由度系统运动的方程组,在考虑广义坐标、广义速度和约束条件的基础上,可以精确地描述系统的运动规律。