环路的跟踪性能
- 格式:ppt
- 大小:1.72 MB
- 文档页数:65

GNSS接收机锁相环最佳环路带宽的选取张杰;马冠一【摘要】锁相环环路带宽值的选取对于锁相环的跟踪误差性能有重要影响。
基于全球卫星导航系统( GNSS)接收机中常用锁相环结构与数学模型,首先介绍了锁相环及其重要组成部分环路滤波器的结构和原理,然后分析了环路带宽的取值对锁相环两个最重要的误差源———环路热噪声误差和晶振阿伦偏差的影响,给出了低动态下使锁相环总的跟踪误差最小的最佳环路带宽的理论表达式。
对基于由现场可编程门阵列( FPGA)芯片、温补晶振和模/数接口电路构建的实际硬件接收机平台进行了验证,结果表明:当根据最佳环路带宽的理论表达式取环路带宽值时,锁相环的跟踪误差最小。
所推得的理论表达式不仅可以应用于GNSS接收机,也适用于一般的载波跟踪环设计。
%The bandwidth value of phase-locked loop ( PLL ) plays an important role in determining the tracking error performance of PLL. Firstly, the structure and principle of PLL and its important compo-nent—loop filter are introduced based on normal PLL structure and mathematical model of Global Naviga-tion Satellite System( GNSS) receiver. And then the effects of loop bandwidth value on two most important error sources of PLL( PLL loop thermal noise and Allen variance of the oscillator) are analyzed. The theo-retical expression of the optimal loop bandwidth value to minimize the total PLL tracking error in low dy-namic conditions is proposed. And it is verified on the practical hardware receiver platform composed of Field-Programmable Gate Array( FPGA) chip,Temperature Compensate Xtal Oscillator( TCXO) and A/D interface circuits. The results show that PLL tracking error is minimal at the valueaccording to the pro-posed theoretical expression of the optimal loop bandwidth. The theoretical expression can be applied to both GNSS receiver and normal carrier tracking loop design.【期刊名称】《电讯技术》【年(卷),期】2015(000)008【总页数】5页(P890-894)【关键词】GNSS接收机;锁相环;环路滤波器;最优环路带宽【作者】张杰;马冠一【作者单位】中国科学院国家天文台,北京100012; 中国科学院大学,北京100049;中国科学院国家天文台,北京100012【正文语种】中文【中图分类】TN967.11 引言在全球卫星导航系统(Global Navigation Satellite System,GNSS)接收机中,锁相环已经广泛应用于载波信号的跟踪。

一、锁相环环路计算的基本原理锁相环(PLL)是一种控制系统,它可以跟踪并锁定一个输入信号的相位和频率。
它通常包括一个相位比较器、一个数字控制环路滤波器、一个控制电压示数器和一个振荡器。
锁相环环路计算就是指计算和分析锁相环系统的环路参数,以实现系统设计和优化。
锁相环环路计算在数字信号处理、通信系统、雷达和仪器仪表等领域都有着广泛的应用。
在锁相环设计过程中,环路计算可以帮助工程师确定合适的环路带宽、相位裕度以及滤波器设计等参数,从而实现系统对输入信号的准确跟踪和稳定锁定。
二、锁相环环路计算的基本步骤1. 确定锁相环的工作频率范围和精度要求。
根据系统的应用需求和输入信号的特性,确定锁相环所需的频率范围和频率精度,这将指导锁相环环路的设计和计算。
2. 分析环路的稳定性和性能指标。
通过传递函数、脉冲响应和频率特性等分析方法,对锁相环环路的稳定性、相位裕度、噪声抑制和跟踪性能等指标进行评估和分析,为后续的计算和优化提供基础。
3. 计算环路滤波器的参数。
根据系统的稳定性要求和性能指标,计算锁相环环路滤波器的参数,包括带宽、阶数、极点位置和增益等,以实现对输入信号的精确跟踪和稳定锁定。
4. 优化振荡器的设计参数。
选择合适的振荡器类型、频率范围和相位噪声等参数,结合锁相环环路的设计要求进行优化,确保锁相环系统的性能达到最佳状态。
5. 模拟仿真和实际测试。
利用matlab等工具进行锁相环环路计算的模拟仿真,验证设计参数的有效性和系统性能的稳定性,然后进行实际测试和调试,对系统进行进一步优化和改进。
三、matlab在锁相环环路计算中的应用matlab是一种强大的数学建模和仿真工具,它在锁相环环路计算中有着广泛的应用。
通过matlab工具箱中的控制系统工具箱和信号处理工具箱,可以方便地进行锁相环环路的建模、分析和计算,为系统设计和优化提供有效的支持。
matlab提供了丰富的控制系统函数和工具,可以实现锁相环环路的传递函数建模、频率响应分析、环路稳定性评估和性能指标计算等功能。
1. 对所有锁相环,闭环频率响应为低通;误差传递函数为高通。
2. 所有锁相环对相位阶跃锁定;频率斜升二阶2型环可以锁定,但精度不高;频率阶跃所有锁相环都可以锁定。
3. 相位噪声的时域表示为方差,频域用功率谱密度表示。
4. 跳周所引起的失锁和环路门限噪声低所引起的失锁性质不同。
跳周是因为环路信噪比小,噪声较大导致失锁,但经过若干个 周期后还可能在一个新的平稳状态上稳定下来;而门限低引起失锁则是因为环路噪声门限低,失锁以后若不提高s/n 到一定值就不能再重新锁定。
5. 环路带宽使锁相环获得最佳噪声抑制能力Wn 越小越好,错误,Fn 的选着在俩噪声源谱密度线的交叉点频率附近处时处于最佳状态。
Wn 越小对滤出输入噪声好,但对滤出压控振荡器噪声不好。
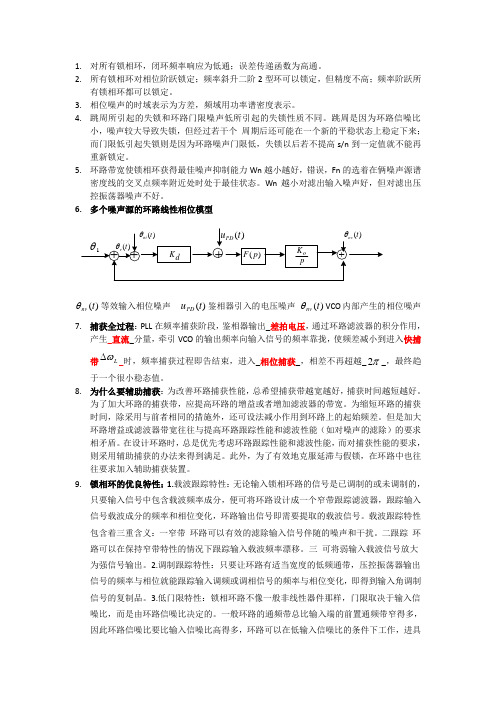
6. 多个噪声源的环路线性相位模型 d K )(p F ++p K o1θ)(t nv θ+++)(t e θ)(t ni θ)(t u PD)(t nv θ等效输入相位噪声 )(t u PD 鉴相器引入的电压噪声 )(t nv θVCO 内部产生的相位噪声7. 捕获全过程:PLL 在频率捕获阶段,鉴相器输出_差拍电压,通过环路滤波器的积分作用,产生_直流_分量,牵引VCO 的输出频率向输入信号的频率靠拢,使频差减小到进入快捕带L ω∆_时,频率捕获过程即告结束,进入_相位捕获_,相差不再超越_π2_,最终趋于一个很小稳态值。
8. 为什么要辅助捕获:为改善环路捕获性能,总希望捕获带越宽越好,捕获时间越短越好。
为了加大环路的捕获带,应提高环路的增益或者增加滤波器的带宽。
为缩短环路的捕获时间,除采用与前者相同的措施外,还可设法减小作用到环路上的起始频差。
但是加大环路增益或滤波器带宽往往与提高环路跟踪性能和滤波性能(如对噪声的滤除)的要求相矛盾。
在设计环路时,总是优先考虑环路跟踪性能和滤波性能,而对捕获性能的要求,则采用辅助捕获的办法来得到满足。
此外,为了有效地克服延滞与假锁,在环路中也往往要求加入辅助捕获装置。

一种改进的高动态GPS载波组合跟踪环路算法作者:冯晓明廉保旺何伟来源:《现代电子技术》2012年第05期摘要:在高动态的接收环境下,GPS接收机接收信号载频上会产生很大的多普勒频移及其变化率,传统的GPS载波跟踪环无法保证可靠的跟踪。
在综合分析了常规跟踪方案的利弊后,提出一种新的基于四相鉴频(FQFD)牵引的二阶叉积自动频率控制环(CPAFC)辅助三阶锁相环(PLL)高动态跟踪环路算法。
通过美国喷气推进实验室(JPL)高动态载体模型测试表明,该算法在高动态环境下不仅能快速牵入和锁定载波信号,而且在高达100 g/s的加加速度作用过程中能持续、精确跟踪,实现导航电文的正常解调。
关键词:四相鉴频; 叉积自动频率控制环; 高动态; GPS; 载波跟踪中图分类号:文献标识码:A文章编号:An improved combination loop algorithm for high dynamic GPS carrier tracking,,(School of Electronics and Information, Northwestern Polytechnical University, Xi’an 710072, China)Abstract:For high dynamic environment, the received signal carrier frequency can produce a large Doppler shift and rate of change, so traditional GPS carrier tracking loop can not guarantee reliable tracking. A new tracking loop algorithm is introducevector model tests show that the algorithm not only can quickly locked but also accurate tracking the carrier signal to achieve the navigation data demodulation in high dynamic environment whose jerk is up to 100 g/s.Keywords: FQFD; CPAFC; high dyna收稿日期:基金项目:国家自然科学基金(61174194);航空科学基金(20090196004);西北工业大学研究生创业种子基金(Z2011110)0 引言近年来,国内外在高动态GPS载波跟踪环路\[1\方面进行大量的研究。
所谓锁相环路,实际是指自动相位控制电路(APC),它是利用两个电信号的相位误差,通过环路自身调整作用,实现频率准确跟踪的系统,称该系统为锁相环路,简称环路,通常用PLL表示。
锁相环路是由鉴相器(简称 PD)、环路滤波器(简称 LPF或LF)和压控振荡器(简称 VCO)三个部件组成闭合系统。
这是一个基本环路,其各种形式均由它变化而来PLL概念设环路输入信号v i= V im sin(ωi t+φi)环路输出信号v o= V om sin(ωo t+φo)——其中ωo=ωr+△ωo通过相位反馈控制,最终使相位保持同步,实现了受控频率准确跟踪基准信号频率的自动控制系统称为锁相环路。
PLL构成由鉴相器(PD)环路滤波器(LPF)压控振荡器(VCO)组成的环路。
PLL原理从捕捉过程→锁定A.捕捉过程(是失锁的)a.φi┈φi均是随时间变化的,经相位比较产生误差相位φe=φi-φo,也是变化的。
b.φe(t)由鉴相器产生误差电压v d(t)=f(φe)完成相位误差—电压的变换作用。
v d(t)为交流电压。
c. vd(t)经环路滤波,滤除高频分量和干扰噪声得到纯净控制电压,由VCO产生控制角频差△ω0,使ω0随ωi变化。
B.锁定(即相位稳定)a.一旦锁定φe(t)=φe∞(很小常数)v d(t)= V d(直流电压)b.ω0≡ωi输出频率恒等于输入频率(无角频差,同时控制角频差为最大△ω0max, 即ω0=ωr+△ω0max。
ωr为VCO固有振荡角频率。
)锁相基本方程和相位模型(时域)★★各部件相位模型★鉴相器(PD)相位模型⊙数学模式v d(t)=A D sinφe(t)⊙相位模式★环路滤波器(LPF)相位模式⊙数学模式v c(t)=A F(P)v d(t)⊙相位模式★压控振荡器(VCO)相位模式⊙数学模式⊙相位模式★★环路相位模型★相位模式:指锁相环(PLL)输入相位和输出相位的反馈调节关系。
★相位模型:把鉴相器,环路滤波器和压控振荡器三个部件的相位模型依次级联起来就构成锁相相位模型。
基于矢量延迟锁定环路的GPS信号跟踪算法
朱珍珍;汤广富;程翥;皇甫堪
【期刊名称】《自然科学进展》
【年(卷),期】2009(019)009
【摘要】型的可靠性,并通过仿真结果的比较,表明了矢量码环优于传统跟踪环.【总页数】8页(P1021-1028)
【作者】朱珍珍;汤广富;程翥;皇甫堪
【作者单位】国防科学技术大学电子科学与工程学院信号处理买验室;国防科学技术大学电子科学与工程学院ATR实验室,长沙,410073;国防科学技术大学电子科学与工程学院信号处理买验室;国防科学技术大学电子科学与工程学院信号处理买验室
【正文语种】中文
【中图分类】TN96
【相关文献】
1.单音干扰下相干扩频系统早迟门延迟锁定环路性能分析 [J], 沈雷;李式巨;陈芳妮;王彦波
2.窄带环路下基带延迟锁定环跟踪性能分析 [J], 余金峰;杨文革;路伟涛;李猛
3.微弱GPS信号矢量频率锁定环设计 [J], 罗士栋;张洪伦;巴晓辉;陈杰
4.基于自适应卡尔曼滤波的GNSS矢量锁定环路 [J], 赵思浩;陆明泉;冯振明
5.基于延迟锁定环超宽带通信信号的跟踪算法 [J], 李瑛;陶正;牛忠霞
因版权原因,仅展示原文概要,查看原文内容请购买。
GPS软件接收机跟踪环路设计李豹;曹可劲;马建国【摘要】GPS软件接收机跟踪环路的设计在环路参数与鉴相器选择上有很大空间.在分析GPS跟踪原理的基础上,对比码环与载波环不同鉴相器的性能,然后在不同环路参数下对跟踪效果进行了仿真比较,最后选择一组鉴相器并设计合适的环路参数,对实际采集的GPS中频信号进行跟踪,跟踪结果验证了设计环路的有效性.【期刊名称】《电子设计工程》【年(卷),期】2010(018)002【总页数】3页(P4-6)【关键词】GPS;软件接收机;跟踪;二阶锁相环【作者】李豹;曹可劲;马建国【作者单位】海军工程大学导航工程系,湖北,武汉,430033;海军工程大学导航工程系,湖北,武汉,430033;海军工程大学导航工程系,湖北,武汉,430033【正文语种】中文【中图分类】TN966.4接收机是全球导航定位系统(GPS)用户端的主要设备,随着软件无线电技术的发展,软件接收机由于其灵活、可扩展、经济等优点成为当前的研究热点[1]。
而GPS信号的捕获与跟踪是软件接收机的核心部分。
捕获算法中,并行码频域搜索算法由于其无可比拟的速度优势已成为经典算法,而跟踪算法在环路鉴相器以及环路参数的选择上却很灵活。
目前国内GPS软件接收机跟踪环路参数设计多根据已有经验值[2],文献[3]给出部分参数的设计准则,但尚无不同环路参数的对比研究。
本文在分析GPS软件接收机跟踪原理的基础上,首先比较码环与载波环不同鉴相器的性能,然后对二阶锁相环中不同环路参数设置下的跟踪效果进行仿真分析,最后设计了合适的码环与载波环路,并用实际采集的GPS数据论证了所设计环路的有效性,为GPS软件接收机跟踪环路的设计提供了参考。
1 GPS跟踪基本原理1.1 数学原理GPS信号跟踪是利用捕获到的粗略码相位和载波多普勒频移实现本地信号与输入信号的准确同步,从而提取出导航电文。
其数学原理[4]97如下:单颗GPS卫星信号经滤波、下变频、A/D转换后得到数字中频信号,其数学模型为:式中,sk(n)为中频信号,Ck(n)为 C/A 码,Dk(n)为导航电文,ωIF为中频信号角频率,e(n)为噪声信号,k为某颗卫星编号。