卫星接收机跟踪环路介绍
- 格式:ppt
- 大小:7.79 MB
- 文档页数:81


工学硕士学位论文导航接收机跟踪环路及时间同步的设计与实现李劲松哈尔滨工业大学2008年12月国内图书分类号:TN96国际图书分类号:621.39工学硕士学位论文导航接收机跟踪环路及时间同步的设计与实现硕士研究生:李劲松导师:张乃通教授申请学位:工学硕士学科、专业:通信与信息系统所在单位:深圳研究生院答辩日期:2008年12月授予学位单位:哈尔滨工业大学Classified Index: TN96U.D.C: 621.39Dissertation for the Master Degree of EngineeringDESIGNING AND IMPLEMENTATION OF TRACKING LOOP AND TIMESYNCHRONIZATION OFNAVIGATION RECEIVERCandidate: Li JinsongSupervisor:Prof. Zhang Naitong Academic Degree Applied for:Master of Engineering Specialty: Communication andInformation System Affiliation: Shenzhen Graduate School Date of Defence:December, 2008Degree-Conferring-Institution:Harbin Institute of Technology哈尔滨工业大学工学硕士学位论文摘要卫星导航定位系统是近几十年来发展起来的无线电导航系统,为全球用户提供准确的定位和授时服务,其应用范围越来越广泛。
因此,卫星导航接收机具有广阔的市场应用前景。
本文研究的卫星导航接收机系统,它能兼容接收GPS信号和我国的卫星导航信号。
作为接收机中的一个重要组成部分,码跟踪环路和载波跟踪环路的研究和开发显得尤为重要。
此外,本地接收机与源信号之间的时间同步也为接收机的应用打下良好的基础。

跟踪接收机原理
跟踪接收机是一种用于精确测量信号源的设备,其原理基于频域和时域分析技术。
它由接收天线、低噪声放大器、解调器和信号处理单元等结构组成。
以下是跟踪接收机的工作原理:
1. 初始搜索阶段:接收机扫描一定频率范围内的信号,找到目标信号的大致位置。
2. 跟踪阶段:接收机不断调整自身频率和相位,以保持与目标信号的同步。
3. 锁定阶段:接收机成功跟踪目标信号,可以进行信号的解调、处理和显示。
此外,跟踪接收机还利用多普勒频移原理,捕捉信号源发出的信号,并将其解调出基频信号。
当信号源与接收机之间存在相对运动时,会产生多普勒频移,通过测量频偏可计算出信号源的位置和速度信息。
跟踪接收机具有高灵敏度、低噪声、抗干扰能力强等优势,应用场景广泛,包括卫星通信、雷达监测、导弹制导等军事领域,以及无人机控制、交通管制等民用领域。
以上内容仅供参考,如需更多信息,建议查阅相关文献或咨询专业人士。
山西科技SHANXI SCIENCE AND TECHNOLOGY 2015年第30卷第6期全球卫星导航系统(GNSS,GlobalNavigationSatelliteSystem)泛指所有全球卫星导航系统以及区域和增强系统,为全球或区域用户提供精密定位导航和授时服务,在各国的国防、军事和经济发展中发挥越来越大的作用。
近年来,全球卫星定位导航技术飞速的发展,引来各大领域广泛使用GNSS,在航空、通信、测绘、授时、车辆监控管理等应用场景中都发挥着极其重要的作用,因此人们对GNSS展开了广泛深入的研究,其中最为热门的是抗干扰技术的相关研究[1]。
本文在研究典型GPS接收机的基础上,深入研究了多径环境中接收机接收到的卫星信号模型,对比分析了常见多径抑制算法的复杂性和抑制效果,通过深入研究信号跟踪捕获的基本原理,明确了跟踪环受到多径干扰对其的影响,在分析多径效应的基础上,设计了一种可以减少多径干扰的信号跟踪环路,该跟踪环路通过提高抗多径干扰性能从而保障接收机在复杂的自然环境中能正常工作,增强了接收机的鲁棒性,具有非常广泛的实用价值,并且能够推动人们对全球卫星定位导航技术的研究,意义重大。
1GPS中频信号模型1.1卫星信号模型的建立当GPS卫星发射出的信号在穿过大气层在空间传输时,通过大气层被处于地球表面的GPS接收机上的天线接收下来,因此接收到的信号中已受到了多种误差的影响。
本文研究的是民用的GPS信号,因此选用的是载波频率为1575.42MHz的L1频点,所以GPS接收机接收到的第i颗卫星的GPS卫星信号模型如式(1)所示:RL1i=2Pr姨Di(t-Tp-驻tiono-驻ttropo +驻tSV)×Ci(t-Tp-驻tiono-驻ttropo+驻tSV)×cos[棕L(t-TP -驻tiono-驻ttropo +驻tSV)+渍0](1)式中:RL1i是第i颗卫星L1频段信号;Pr是信号功率;t是成功接收所用的时间;TP 是信号从卫星传输到接收机上所需的时间;驻tiono,驻ttropo 分别为电离层和对流层误差;驻tSV是系统的时钟偏差[2]。
GNSS接收机跟踪环路关键技术研究随着新一代全球卫星导航系统(GlobalNavigationSatelliteSystem,GNSS)的快速建设,针对卫星导航相关技术的研究与发展备受关注。
卫星信号接收机是卫星导航系统实现导航、定位和授时功能的必备终端,也是卫星导航系统重要的组成环节之一。
信号跟踪环路是卫星信号接收机内部关键的功能模块,关系到接收机的全部功能及性能指标的实现。
由于跟踪环路技术的广普性,又经过多年发展,因此一般都认为跟踪环路的设计方法都相对比较成熟。
然而在复杂电磁环境或者接收信号信噪比实时起伏的情况下,普通的环路设计并不能使得跟踪环路持续工作在最佳状态,这时就需要对环路进行更细致的分析和设计。
另外,二进制偏置载波调制(BinaryOffsetCarrier,BOC)具有多峰特性,关于BOC的研究热点大多集中在如何抑制其副相关峰上。
但是在高信噪比条件下,如果能够针对BOC信号的多个相关峰同时进行跟踪锁定,则可以获得更高的相关增益,从而进一步提高BOC环路的跟踪效果。
针对上述复杂电磁环境或者接收信号信噪比实时起伏情况下如何设计最佳跟踪环路,以及如何在高信噪比条件下利用BOC信号的多个相关峰实现更高测距精度的问题,本论文分别从载波跟踪环路和码跟踪环路对其进行深入的分析和研究。
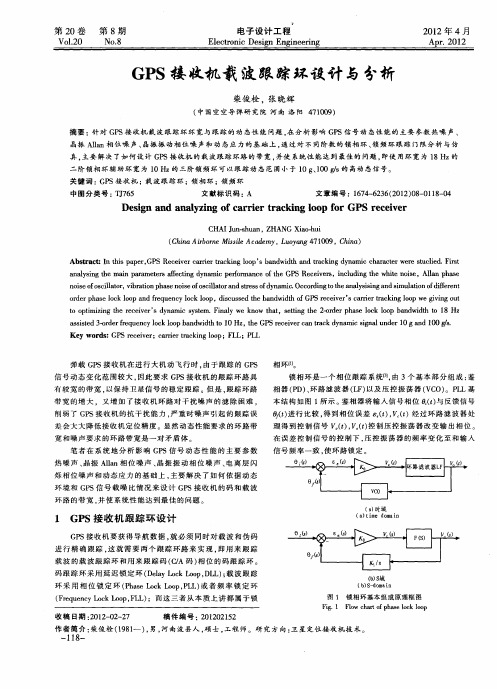
接收机跟踪环路由载波跟踪环路和码跟踪环路相互嵌套而成,其中载波跟踪环路设计又包括锁频环(FrequencyLockLoop,FLL)和锁相环(FhaseLockLoop,PLL)设计。
因此,本论文的跟踪环路研究工作基于码跟踪环路、FLL和PLL这三个方面展开。
在码跟踪环路方面,本论文提出针对BOC信号的多峰联合跟踪环路设计方法。
首先,本论文对BOC信号自相关和BOC与未调制子载波的扩频码(Pseudo-RandomNoise,PRN)之间互相关性进行研究,提出能够同时锁定多个相关峰的多峰联合跟踪方法,并给出新的多峰联合鉴相器。
卫星导航信号接收处理跟踪基本原理目录O N T E N T SC0102030405接收信号的变化信号跟踪的主要目的码跟踪基本原理-信号解扩码跟踪与载波跟踪的融合载波跟踪基本原理-信号解调06跟踪环路闭合的前提条件➢接收机结构信号接收通道...通道2通道1低噪声放大器下变频滤波放大A/D 变换器AGC导航解算用户接口射频前端模拟中频数字中频天线参考晶振频率合成器跟踪捕获电文同步校验基带处理应用处理➢接收信号的变化—多普勒移卫星信号接收频率随信号发射源与接收机之间的相对运动而发生变化的现象称为多普勒效应,频率的变化称为多普勒频移。
θθυθυυsin 2cos cos 22s e see s e s d r r r r r ASr −+==v d :速度分量引起多普勒效应地球O r e =6731kmβ21528kmBθαAv s =3874m/s卫星圆形轨道r s =27899kmS➢接收信号的变化—多普勒移投影速度最大值:m38746731935m/s 27899s ed s r r υυ⨯==≈最大载波多普勒频移:81561.098935 4.9kHz 310r dm dr f f c υ⨯==≈⨯最大码多普勒频移:682.04610935 6.4Hz 310r h dc f f c υ⨯⨯==≈⨯假设接收机在地球表面处于静止状态➢接收信号的变化—测距码相位未知一个周期的测距码初始码相位是零一个周期的测距码初始码相位是零传播方向⚫接收机从任意时刻开始处理接收机处理1 ms➢接收信号的变化—测距码相位未知接收到的码接收机产生的码τ=?()()()B1I B1I B1IB1IB1I()cos 2πj j j r s t A Ct D t f t ϕ=+➢接收信号的变化c dr f f f +=天线接收到的信号频率:1561.098MHz c f 假设信号发射频率:=()()()()cos 2πr s t AC t D t f t ϕ=+省略下标B1I 和上标j射频前端IF df f +()()()IF ()cos 2π()d s t AC t D t f f t ϕ=++经过射频前端忽略噪声及其他因素的影响严格来说,应采用数字信号的写法,即用nT 代替左式中的t➢信号跟踪的主要目的①获取导航电文;②测量距离;③获取多普勒频移;④测量载波相位。