悬架扭杆和稳定杆刚度对车辆转向灵敏度的影响分析
- 格式:pdf
- 大小:369.47 KB
- 文档页数:5
悬架系统力学特性悬架对车辆性能的影响:转向时,由于悬架系统的存在,使得车身在离心力的作用下会出现侧倾,从而造成左、右车轮的垂直载荷分配不均,引起左、右两侧车轮的地面附着力的变化,而其将对车辆操纵稳定性带来影响,因此,悬架分析又是操纵稳定性分析中的重要内容。
悬架的特性主要体现在刚度上。
以下主要分析典型扭杆悬架的刚度特性。
扭杆悬架扭杆悬架的特点:结构简单、工作可靠、使用寿命长、单位质量变形能大。
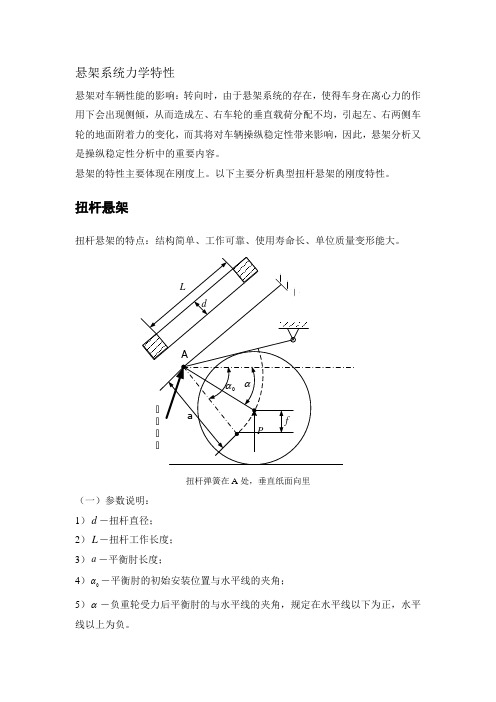
扭杆弹簧在A处,垂直纸面向里(一)参数说明:1)d-扭杆直径;2)L-扭杆工作长度;3)a-平衡肘长度;4)α-平衡肘的初始安装位置与水平线的夹角;5)α-负重轮受力后平衡肘的与水平线的夹角,规定在水平线以下为正,水平线以上为负。
(二)受力分析平衡肘在受到垂直方向的力P 作用时,扭杆一端从0α位置变到了α位置,则在扭杆上作用的扭矩为M :cos M Pa α=设在扭矩M 作用下,扭杆的扭角为:0M L G Jθαα=-=式中,J 为扭杆断面的极惯性矩,对实心圆杆有:440.132d J d π=≈;G 为扭杆材料的切变弹性模量(对钢,74530.5~79433.8G M P a =)。
由上两式可得:()0cos G J P La ααα-=由于刚度是力对位移的微分,所以要求刚度,还得需要确定位移。
负重轮行程为:()0sin sin f a αα=-则可得扭杆悬架的线刚度为:()0221cos x dPtg dPG J d m df df La daααααα--=== 把J 的表达式代入上式得:()4022132cos x tg G d m Laαααπα--=当0α=时,即平衡肘处于水平位置,此时可得 40232x G d m Laπ=(三)扭杆悬架刚度特性的影响因素 1)扭杆直径d 的影响,d 越大,刚度越大; 2)扭杆工作长度L 的影响,L 越长,刚度越小; 3)平衡肘长度a 的影响,平衡肘越长,刚度越小;4)工作位置α的影响。
2009年(第31卷)第1期汽 车 工 程Aut omotive Engineering2009(Vol .31)No .12009010关于通过悬架改进设计优化汽车转向特性的研究33国家高技术研究发展计划(863)(2007AA04Z122)资助。
原稿收到日期为2008年3月26日,修改稿收到日期为2008年6月16日。
海贵春1,2,谷正气1,骆 军2,吴彤峰3,向 宇3(11湖南大学,汽车车身先进设计制造国家重点实验室,长沙 410082; 21上海世科嘉技术研发有限公司,上海 201209;31广西工学院汽车工程系,柳州 545006)[摘要] 对某S UV 车建立了刚柔耦合整车系统虚拟样机模型,进行了稳态转向特性仿真分析,发现该车具有先不足转向后过多转向的问题,并且中性转向点的侧向加速度值a n 偏小。
通过对悬架刚度、稳定杆刚度的优化设计,解决了该车的过多转向问题,使之具有了适度的不足转向特性,并且使a n 达到了设计要求。
最后对改进前后的方案进行了对比分析及试验验证,说明优化的效果是非常明显的。
关键词:转向特性;不足转向;过多转向;优化A Study on the Op ti m izati on of Vehicle Steering Characteristicsby Sus pensi on Modificati onHa i Gu i chun1,2,Gu Zhengq i 1,L uo Jun 2,W u Tongfeng 3&X i a ng Y u311Hunan U niversity,Key S tate Laboratory of Advanced Technology and M anufacturing for V ehicle B ody,Changsha 410082;21S I CAR V ehicle Technology D evelop m ent Co .,L td .,Shanghai 201209;31D epart m ent of Auto m obile Engineering,Guangxi U niversity of Technology,L iuzhou 545067[Abstract] A rigid 2flexible coup led model as the virtual p r ot otype of a S UV is built,and a si m ulati on is con 2ducted on its steady 2state steering characteristics,which indicates that the vehicle shows understeer first and then o 2versteer,with a t oo s mall lateral accelerati on on neutral point The p r oble m of oversteer is res olved by changing the s p ring rate of sus pensi on and the stiffness of t orsi on bar,leading t o a reas onable understeer and a lateral accelera 2ti on,meeting design require ments .Finally,comparative analysis and test verificati on are perfor med,which show that the modificati on in sus pensi on design has apparent effects on i m p r oving steering characteristics .Keywords:steer i n g character isti c;understeer;oversteer;opti m i za ti on前言虚拟样机技术的研究范围主要是机械系统运动学和动力学分析,其核心是建立机械系统的多体系统动力学模型[1-3],利用计算机辅助分析技术进行运动学和动力学分析。
Jr=0.09;Jm=0.006;G1=25;G2=24;Br=0.27;Bm=0.04;a=1.564;b=1.684;d=0.11;L=3.248;k1=-63629;k2=-120184;m=2143.5;Iz=3978;V=10;Bh=0.27;Bm=0.04;R=0.1;Ka=0.02;Ks=10;K=10;Ka=0.02;s=0:0.001:6; %车辆参数Xs=-a*m*V*k1.*s+(a+b)*k1*k2;Ys=-k1*Iz.*s+b*(a+b)*k1*k2/V+a*m*V*k1;Zs=m*V*Iz.*s.^2-(m*(a^2*k1+b^2*k2)+Iz*(k1+k2)).*s+(a+b)^2*k1*k2/V+m*V*(a*k1-b*k2); Ms=Ks+G1*K*Ka*Ks;Qs=k1*d.*((V.*Ys+a.*Xs-V.*Zs))./(G2^2.*V.*Zs);Ns=(Jr+Jm*G1^2).*s.^2+(Br+Bm*G1^2).*s+G1*K*Ks*Ka+Ks+Qs;dd=Xs.*Ms./(G2.*Zs.*Ns); %定义灵敏度函数num1=[1];den1=[G2];sys1=tf(num1,den1);num2=[Ms];den2=[m*V*Iz,-(m*(a^2*k1+b^2*k2)+Iz*(k1+k2)),(a+b)^2*k1*k2/V+m*V*(a*k1-b *k2)];sys2=tf(num1,den2);num3=[-a*m*V*k1,(a+b)*k1*k2];den3=[Jr+Jm*G1^2,Br+Bm*G1^2,G1*K*Ks*Ka+Ks];sys3=tf(num3,den3);sys=sys1*sys2*sys3; %传递函数即灵敏度bode(sys)gridhold onJr=0.09;Jm=0.006;G1=25;G2=24;Br=0.27;Bm=0.04;a=1.564;b=1.684;d=0.11;L=3.248;k1=-63629;k2=-120184;m=2143.5;Iz=3978;V=10;Bh=0.27;Bm=0.04;R=0.1;Ka=0.02;Ks=50;K=10;Ka=0.02;s=0:0.001:6; %车辆参数Xs=-a*m*V*k1.*s+(a+b)*k1*k2;Ys=-k1*Iz.*s+b*(a+b)*k1*k2/V+a*m*V*k1;Zs=m*V*Iz.*s.^2-(m*(a^2*k1+b^2*k2)+Iz*(k1+k2)).*s+(a+b)^2*k1*k2/V+m*V*(a*k1-b*k2); Ms=Ks+G1*K*Ka*Ks;Qs=k1*d.*((V.*Ys+a.*Xs-V.*Zs))./(G2^2.*V.*Zs);Ns=(Jr+Jm*G1^2).*s.^2+(Br+Bm*G1^2).*s+G1*K*Ks*Ka+Ks+Qs;dd=Xs.*Ms./(G2.*Zs.*Ns); %定义灵敏度函数num1=[1];den1=[G2];sys1=tf(num1,den1);num2=[Ms];den2=[m*V*Iz,-(m*(a^2*k1+b^2*k2)+Iz*(k1+k2)),(a+b)^2*k1*k2/V+m*V*(a*k1-b *k2)];sys2=tf(num1,den2);num3=[-a*m*V*k1,(a+b)*k1*k2];den3=[Jr+Jm*G1^2,Br+Bm*G1^2,G1*K*Ks*Ka+Ks];sys3=tf(num3,den3);sys=sys1*sys2*sys3; %传递函数即灵敏度bode(sys,':')hold onJr=0.09;Jm=0.006;G1=25;G2=24;Br=0.27;Bm=0.04;a=1.564;b=1.684;d=0.11;L=3.248;k1=-63629;k2=-120184;m=2143.5;Iz=3978;V=10;Bh=0.27;Bm=0.04;R=0.1;Ka=0.02;Ks=100;K=10;Ka=0.02;s=0:0.001:6; %车辆参数Xs=-a*m*V*k1.*s+(a+b)*k1*k2;Ys=-k1*Iz.*s+b*(a+b)*k1*k2/V+a*m*V*k1;Zs=m*V*Iz.*s.^2-(m*(a^2*k1+b^2*k2)+Iz*(k1+k2)).*s+(a+b)^2*k1*k2/V+m*V*(a*k1-b*k2); Ms=Ks+G1*K*Ka*Ks;Qs=k1*d.*((V.*Ys+a.*Xs-V.*Zs))./(G2^2.*V.*Zs);Ns=(Jr+Jm*G1^2).*s.^2+(Br+Bm*G1^2).*s+G1*K*Ks*Ka+Ks+Qs;dd=Xs.*Ms./(G2.*Zs.*Ns); %定义灵敏度函数num1=[1];den1=[G2];sys1=tf(num1,den1);num2=[Ms];den2=[m*V*Iz,-(m*(a^2*k1+b^2*k2)+Iz*(k1+k2)),(a+b)^2*k1*k2/V+m*V*(a*k1-b *k2)];sys2=tf(num1,den2);num3=[-a*m*V*k1,(a+b)*k1*k2];den3=[Jr+Jm*G1^2,Br+Bm*G1^2,G1*K*Ks*Ka+Ks];sys3=tf(num3,den3);sys=sys1*sys2*sys3; %传递函数即灵敏度bode(sys,'-.')hold onJr=0.09;Jm=0.006;G1=25;G2=24;Br=0.27;Bm=0.04;a=1.564;b=1.684;d=0.11;L=3.248;k1=-63629;k2=-120184;m=2143.5;Iz=3978;V=10;Bh=0.27;Bm=0.04;R=0.1;Ka=0.02;Ks=200;K=10;Ka=0.02;s=0:0.001:6; %车辆参数Xs=-a*m*V*k1.*s+(a+b)*k1*k2;Ys=-k1*Iz.*s+b*(a+b)*k1*k2/V+a*m*V*k1;Zs=m*V*Iz.*s.^2-(m*(a^2*k1+b^2*k2)+Iz*(k1+k2)).*s+(a+b)^2*k1*k2/V+m*V*(a*k1-b*k2); Ms=Ks+G1*K*Ka*Ks;Qs=k1*d.*((V.*Ys+a.*Xs-V.*Zs))./(G2^2.*V.*Zs);Ns=(Jr+Jm*G1^2).*s.^2+(Br+Bm*G1^2).*s+G1*K*Ks*Ka+Ks+Qs;dd=Xs.*Ms./(G2.*Zs.*Ns); %定义灵敏度函数num1=[1];den1=[G2];sys1=tf(num1,den1);num2=[Ms];den2=[m*V*Iz,-(m*(a^2*k1+b^2*k2)+Iz*(k1+k2)),(a+b)^2*k1*k2/V+m*V*(a*k1-b *k2)];sys2=tf(num1,den2);num3=[-a*m*V*k1,(a+b)*k1*k2];den3=[Jr+Jm*G1^2,Br+Bm*G1^2,G1*K*Ks*Ka+Ks];sys3=tf(num3,den3);sys=sys1*sys2*sys3; %传递函数即灵敏度bode(sys,'--')legend('Ks=10','Ks=50','Ks=100','Ks=200')。
2003年8月重庆大学学报Aug.2003 第26卷第8期Journal of Chongqing UniversityVol.26 No.8 文章编号:1000-582X (2003)08-0010-04麦弗逊悬架刚度对汽车稳态转向特性的影响①褚志刚1,邓兆祥1,胡玉梅1,朱 明1,李 伟2(1.重庆大学机械传动国家重点实验室,重庆 400044;2.重庆长安有限责任公司汽车技术中心,重庆 400023)摘 要:以多体系统动力学理论为基础,以某微型汽车为工程实例,建立了包含车架、转向系、前后悬架和差速器5大总成的某麦弗逊前悬架汽车稳态转向特性整车动力学分析模型,研究了螺旋弹簧刚度和横向稳定杆直径等悬架刚度参数对汽车稳态转向特性的影响规律。
分析结果表明,增加前螺旋弹簧刚度和横向稳定杆直径能明显提高该车的稳态转向特性,但稳态转向特性得分值增量却逐渐下降。
因此,合理选择前悬架刚度参数是提高麦弗逊前悬架汽车稳态转向特性的有效途径。
关键词:多体动力学;稳态转向特性;汽车系统动力学;麦弗逊悬架中图分类号:U461.6文献标识码:A 稳态转向特性是汽车系统动力学中最重要的性能之一。
而稳态转向特性的影响因素较多,如整车质量分布、前后轴距、前后轴的侧偏刚度匹配等。
在整车质量分布和前后轴距一定的情况下,改变轮胎气压、轮胎结构形式、汽车驱动形式、车轮的载荷分配、转向轮的车轮外倾角等对前后轴侧偏刚度匹配都有明显影响[1-2]。
国内外大量文献在分析上述参数对汽车稳态转向特性的影响时都借助于理论分析给出定性结论,而定量的分析结论和方法很少报道。
麦弗逊独立悬架在实际变形过程中,车轮外倾角等定位角度会相应的发生明显变化,影响前轴的侧偏刚度。
而前螺旋弹簧刚度和横向稳定杆直径是影响曲线行驶汽车左右车轮外倾角的重要参数。
本文利用多体系统动力学方法[3-4],以某微型汽车为工程实例,建立满足稳态转向特性分析的整车多体系统动力学分析模型,研究了前悬架螺旋弹簧刚度和横向稳定杆直径对汽车稳态转向特性的影响。

基于转向和强度特性的扭力梁悬架优化研究随着汽车工业的不断发展,车辆悬架优化已成为了汽车工程师必须面对的一个重要课题,因为悬架系统对于汽车的驾驶感受和安全性起到了至关重要的影响。
扭力梁悬架是一种常见的汽车悬架形式,其主要通过扭转梁的柔度和刚度综合控制车身的悬架行程。
本文将通过转向和强度特性的扭力梁悬架优化研究,来探究如何优化该悬架的性能。
首先,对于扭力梁悬架的转向特性进行优化。
在汽车悬架系统中,转向特性是非常重要的一个方面,因为它关系到汽车的转向性能和稳定性。
在扭力梁悬架中,悬架刚度和柔度对于转向特性的影响较大。
如果悬架刚度过大或过小,将导致转向时抖动或者不足的稳定性。
因此,针对扭力梁的悬架系统,可以通过优化悬架组件的弹性模量和极限载荷来达到更好的转向特性。
其次,在扭力梁悬架中,强度对于悬架的稳定性和可靠性也非常重要。
悬架在汽车行驶过程中将承受来自路面不平和汽车自身振动的高强度载荷,因此强度不足往往会导致悬架的疲劳寿命过短或者失效,最终影响到整个汽车的安全性。
因此,通过优化悬架组件的材料强度和截面形状来提高悬架的强度是很重要的。
最后,扭力梁悬架的优化需要综合考虑转向和强度特性。
在实际的悬架设计中,需要找到一个最佳的悬架刚度和柔度,以保证转向性能和稳定性,同时也需要优化悬架的材料和截面形状以提高强度和疲劳寿命。
这些因素之间存在着相互影响和耦合,因此需要综合考虑和权衡,方能达到最佳的悬架优化效果。
总之,转向和强度特性是扭力梁悬架优化研究中较为重要的方面。
在悬架设计中需要针对这些特性进行综合考虑,以保证汽车的驾驶感受和安全性。
随着汽车工业的不断发展,悬架优化将成为汽车工程师必须研究的重要课题,并且其在汽车性能和市场竞争中的重要性也将不断提高。
在扭力梁悬架的优化中,还有一些其他的因素也需要考虑。
例如,车辆驾驶的稳定性和舒适性也是汽车工程师关注的重要点。
在扭力梁悬架的优化中,可以通过调整悬架的刚度和柔度,以及调整减震器和弹簧的参数来优化车辆驾驶的稳定性和舒适性。
悬挂系统刚度对车辆操控性能的影响研究悬挂系统是汽车重要的组成部分之一,它直接影响着车辆的操控性能。
悬挂系统刚度作为悬挂系统的一个重要指标,对车辆的操控性能有着直接的影响。
本文将探讨悬挂系统刚度对车辆操控性能的影响,并带来一些相关研究成果供读者参考。
首先,我们需要了解什么是悬挂系统刚度。
悬挂系统刚度是指悬挂系统在受到载荷作用下的变形量与载荷之间的比例关系。
简单来说,它反映了悬挂系统对路面起伏的适应能力。
悬挂系统刚度越大,车辆在行驶过程中受到的振动就会减小。
相反,悬挂系统刚度越小,车辆的悬挂系统就会更加柔软,使得车辆更容易产生侧倾。
悬挂系统刚度对车辆的操控性能有着重要的影响。
首先,悬挂系统刚度影响着车辆的悬挂系统反馈能力。
当车辆行驶在不平坦的路面上,悬挂系统刚度越高,车辆的悬挂系统就越能够快速响应路面的变化,并将这些变化传递给车辆驾驶员。
这种反馈能力可以让驾驶员更加直观地感受到车辆在路面上的变化,从而更好地控制车辆。
其次,悬挂系统刚度也对车辆的稳定性产生影响。
当车辆行驶在高速公路上或进行急刹车时,悬挂系统的刚度越高,车辆就越能够保持稳定,减少侧倾和悬挂系统的跳动。
这对于驾驶员来说是至关重要的,因为它能够大大提高驾驶的安全性。
最后,悬挂系统刚度还影响着车辆的悬挂系统减震效果。
悬挂系统的主要作用是减震,即通过吸收和消散来自路面的振动,使驾驶员和车辆在行驶过程中感受不到过多的颠簸和震动。
悬挂系统刚度越高,减震效果越好,驾驶员和乘客的舒适性就会得到提高。
近年来,许多学者和工程师对悬挂系统刚度对车辆操控性能的影响进行了研究。
他们通过建立数学模型和进行实验测试,深入研究了悬挂系统刚度与车辆操控性能之间的关系。
一些研究成果表明,适当提高悬挂系统刚度可以显著提高车辆的操控性能,但过于刚硬的悬挂系统也会影响到车辆的操控性能。
在实际应用中,汽车制造商通常会根据车型和用途来设计相应悬挂系统的刚度。
经济型轿车注重舒适性,因此悬挂系统刚度相对较低,以提供更好的乘坐舒适性;而高性能跑车则追求更强的操控性能,因此悬挂系统刚度相对较高,以提供更好的操控体验。