四履带车辆转向性能仿真研究
- 格式:pdf
- 大小:1.13 MB
- 文档页数:6
履带车辆转向动力学仿真知识履带车辆转向动力学仿真是指通过计算机模拟履带车辆转向过程中的动力学特性。
这项仿真技术可以帮助工程师更好地理解和研究履带车辆在不同转向条件下的行为,并优化车辆设计和控制系统。
在履带车辆转向动力学仿真中,需要考虑的关键因素包括车辆的质量、转向系统的特性、轮胎与地面的摩擦系数等。
通过对这些因素进行建模和仿真,可以模拟出车辆在不同道路状况下的转向性能,包括转弯半径、侧滑角度、抓地力等。
在履带车辆转向动力学仿真中,常用的模型包括单轨模型和双轨模型。
单轨模型认为车辆仅在一个垂直于轨道的平面上运动,忽略车辆的纵向运动。
双轨模型则包括车辆的纵向运动,并考虑左右两侧履带之间的转弯差速。
履带车辆转向动力学仿真中,常用的仿真软件包括CarSim、ADAMS等。
这些软件提供了丰富的车辆模型和分析工具,可以模拟车辆在各种道路条件下的转向动力学,如直线行驶、转弯、制动等。
通过履带车辆转向动力学仿真,工程师可以评估不同转向系统设计的性能,并进行优化。
例如,可以通过仿真研究不同转向系统的刚度、行程、空转角度等参数对车辆的转向性能的影响。
此外,还可以研究不同摩擦系数下车辆的侧滑情况,并通过调整控制策略提高车辆的稳定性和灵活性。
总之,履带车辆转向动力学仿真是一项重要的技术,可以帮助工程师更好地理解和研究履带车辆的转向特性。
通过仿真研究,可以优化车辆的设计和控制系统,提高车辆的性能和可靠性。
履带车辆转向动力学仿真是一项复杂而关键的技术,对于履带车辆的设计、性能分析和控制优化具有重要意义。
本文将继续介绍履带车辆转向动力学仿真的相关内容,包括仿真模型、评估参数以及仿真结果的分析等。
一、仿真模型在履带车辆转向动力学仿真中,最基本的模型分为单轨模型和双轨模型。
单轨模型是将履带车辆简化为一个刚性运动体,并在一个垂直于车辆运动平面内进行建模,该模型忽略了车辆的纵向运动。
而双轨模型则考虑了车辆的纵向运动,并通过差速控制来模拟履带车辆的转向情况。
宋凯凯▶◀……………………………………………………………………………四轮转向车辆操纵稳定性仿真分析前言随着科技的进步和汽车产业的发展,人们对于车辆操纵稳定性、舒适性和安全性的要求不断提高,四轮转向(Four-wheel steering ,4WS )作为一种有效改善车辆操纵性能的技术,吸引了国内外众多研究人员[1]。
使用4WS 技术的主要目的有:①减少车辆质心侧偏角β;②减少车辆横摆率与车辆横向加速度之间的相差;③增加轮胎横向力的裕度,使其远离饱和状态[2]。
运用4WS 技术可以有效地减小低速行驶时汽车的转弯半径,使汽车在低速时行驶更加灵活、便于泊车。
同时,4WS 技术还可以大大地改善汽等瞬态响应指标,提高高速行驶时的操纵稳定性和舒适性[7]。
Matlab 作为一种面向科学和工程计算的高级计算机语言,已成为国际科技界公认的最优秀应用软件[3]。
Simulink 是Matlab 提供的主要工具箱之一,用于可视化的动态系统建模、仿真和分析。
它采用系统模块直观地描述系统典型环节,因此十分方便地建立系统模型而不需要花较多时间编程。
并可以对系统作适当的实时修正或者按照仿真的最佳效果来调试及整定控制系统的参数,以提高系统的性能,减少设计系统过程中反复修改的时间,实现高效率地开发系统的目标[2]。
本文基于Matlab/simulink 对四轮转向车辆的控制系统进行了设计,并对4WS 车辆的操纵稳定性进行了仿真研究。
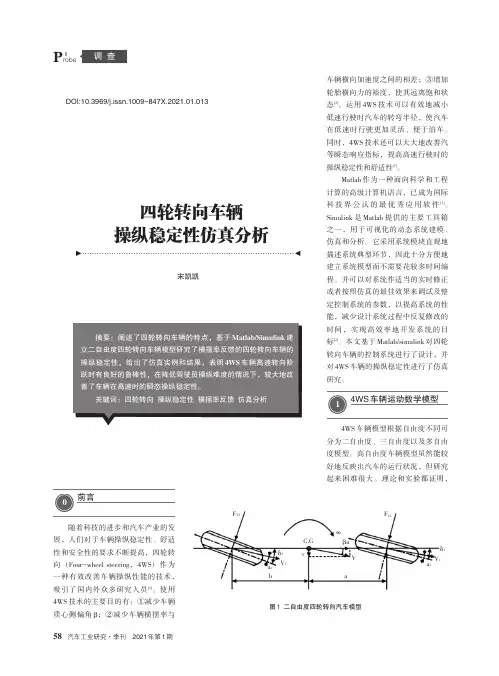
4WS 车辆运动数学模型4WS 车辆模型根据自由度不同可分为二自由度、三自由度以及多自由度模型。
高自由度车辆模型虽然能较好地反映出汽车的运行状况,但研究起来困难很大。
理论和实验都证明,F Y2F Y1δ2V 2a 1bavV C.Gβu ωV 1δ1a 1图1二自由度四轮转向汽车模型在正常车速的非紧急状态和小转向角情况下,包含横摆角速度和质心侧偏角的线性二自由度自行车模型能以较好的精度表征车辆转向的实际物理过程,基于它们设计的控制器能够正常工作[4][8][10]。
《履带式特种车辆精细化动力学建模与仿真》篇一一、引言随着科技的进步和军事需求的不断增长,履带式特种车辆在各种复杂环境下的应用越来越广泛。
为了更好地理解其运动性能、优化设计以及提高仿真精度,精细化动力学建模与仿真成为了研究的热点。
本文旨在探讨履带式特种车辆精细化动力学建模与仿真的相关内容,为相关研究提供参考。
二、履带式特种车辆动力学建模1. 模型假设与简化在建立履带式特种车辆动力学模型时,为了简化问题,我们做出以下假设:车辆在平坦地面上行驶,不考虑空气阻力影响;履带与地面接触的力学关系为线性关系等。
2. 模型构建基于上述假设,我们采用多刚体动力学理论,结合履带式车辆的特性,建立其动力学模型。
该模型包括车辆底盘、履带、驱动系统等部分的运动学和动力学方程。
其中,履带与地面的相互作用力是模型的关键部分,我们采用弹簧-阻尼器模型来描述这种相互作用。
三、精细化建模的考虑因素在建立精细化动力学模型时,我们需要考虑以下因素:1. 履带与地面的摩擦力:不同地面的摩擦系数对车辆的运动性能有很大影响。
因此,我们需要根据实际地面条件,选择合适的摩擦系数。
2. 履带的弹性:履带在行驶过程中会产生一定的弹性变形,这会影响车辆的行驶稳定性和动力性能。
因此,在建模过程中需要考虑履带的弹性。
3. 驱动系统的动态特性:驱动系统的动态特性对车辆的加速、减速等性能有很大影响。
因此,我们需要建立准确的驱动系统模型,以反映其动态特性。
四、仿真分析在建立好动力学模型后,我们进行仿真分析。
通过改变地面条件、履带张力、驱动系统参数等,观察车辆的运动性能变化。
通过对比仿真结果与实际测试结果,验证模型的准确性。
同时,我们还可以通过仿真分析,优化车辆的设计,提高其运动性能。
五、结论本文针对履带式特种车辆精细化动力学建模与仿真进行了探讨。
通过建立多刚体动力学模型,并考虑履带与地面的相互作用力、履带弹性、驱动系统动态特性等因素,我们得到了较为准确的车辆动力学模型。
《履带式特种车辆精细化动力学建模与仿真》篇一摘要:本文着重于对履带式特种车辆进行精细化动力学建模与仿真。
文章首先介绍研究背景及意义,随后对现有研究进行了概述。
在理论模型建立过程中,我们通过合理的假设和科学的推导,提出了符合履带式特种车辆实际运动特性的动力学模型。
并通过先进的仿真技术,验证了模型的准确性。
本文的研究为提升特种车辆的行驶性能和安全性能提供了有力的理论依据和支撑。
一、引言随着科技的不断进步,特种车辆在军事、救援、工程等领域的应用越来越广泛。
履带式特种车辆因其良好的越野性能和适应复杂环境的能力,在各种极端环境中都能表现出良好的机动性。
然而,为了进一步提高其行驶性能和安全性能,深入研究其动力学特性及建立精细化动力学模型变得尤为重要。
本文将通过精细化动力学建模与仿真,探究履带式特种车辆的动态特性及行为规律。
二、研究背景与现状目前,国内外学者对履带式特种车辆的动力学研究主要集中在模型建立、仿真分析和实验验证等方面。
然而,由于履带式特种车辆的结构复杂,其动力学模型往往难以准确描述其实际运动特性。
因此,建立精细化动力学模型,对于提高特种车辆的行驶性能和安全性能具有十分重要的意义。
三、精细化动力学模型的建立3.1 模型假设与参数设定为了简化建模过程并准确反映履带式特种车辆的动态特性,我们进行了以下假设和参数设定:假设车辆行驶在平坦路面上,不考虑侧倾和俯仰等非线性因素;设定了包括履带张紧力、地面摩擦系数等在内的关键参数。
3.2 模型推导与建立基于动力学理论,我们推导出了符合履带式特种车辆实际运动特性的动力学模型。
该模型包括了车辆的驱动系统、转向系统、制动系统等关键部分的动力学方程。
通过这些方程,我们可以精确描述车辆在各种行驶条件下的动态特性。
四、仿真验证4.1 仿真环境搭建我们采用了先进的仿真软件,搭建了履带式特种车辆的仿真环境。
通过设定不同的路面条件、气象条件以及车辆载荷等参数,我们可以模拟出各种实际行驶场景。
四轮转向汽车操纵动力学虚拟仿真分析姓名 XX江苏大学京江学院车辆工程2班学号 XX[摘要]从机械动力学仿真的角度,研究4WS汽车的瞬态和稳态操纵动力学特性。
运用虚拟样机技术,给出4ws车辆在适当前轮转角及不同的大小、比值、方向以及转向时间差等后轮转角的条件下,车辆的瞬态和稳态动力学性能的表现。
关键词:4轮转向,操纵稳定性,机构动力学,虚拟仿真1 前言汽车四轮转向(4WS)技术是改善汽车操纵稳定性的主要手段之一,也是汽车主动底盘技术的重要组成部分。
运用4WS技术,可以有效地减小低速行驶时汽车的转弯半径,使汽车在低速行驶时更加灵活。
同时,该技术还可以大大地改善汽车在高速行驶时横摆角速度和侧向加速度等瞬态响应指标,提高高速行驶时的操纵稳定性。
在4WS汽车的研究方面,大量的是关于后轮参与转向而带来的车辆响应变化以及采用各种转向控制策略而产生的车辆响应的差异。
早期的后轮转向控制方法主要有以下几种:后轮与前轮逆向的转角比例控制方式;后轮与前轮同向的转角比例控制方式;后轮延时控制和前轮相位提前控制方式;后轮位相反转控制方式;前轮转角比例(后轮位相反转控制)P横摆角速度比例控制方式[1]。
近期的研究主要集中于利用现代控制理论进行4WS控制,如模型参考控制,或QR/Q!多目标优化控制等[2—4]。
在上述研究中,人们主要是从控制器设计的角度研究4WS车辆的.所利用是刚体多自由度系统模型,基本不考虑车辆转向系统的机构动力学特征。
建立车辆多自由度简化数学模型是从理论上研究4WS车辆动力学特性的最基本也是极为有效的方法。
从控制算法改进出发的4WS的研究大部分使用包含横摆角速度和侧向加速度的经典的2自由度所谓“自行车”模型;进一步的考虑有包括车辆侧倾的3自由度模型;更仔细地有7自由度、16自由度甚至更多自由度的线性或非线性车辆动力学模。
理论和试验都已经说明[4,5],在低加速度和小的转向角的情况下,这些模型能以较好的精度表征车辆转向的实际物理过程,基于它们设计的控制器能够正常工作。
《履带式特种车辆精细化动力学建模与仿真》篇一一、引言随着科技的进步和军事需求的不断增长,履带式特种车辆因其卓越的越野能力和稳定性,在军事、救援和工程领域中扮演着重要角色。
对履带式特种车辆进行精细化动力学建模与仿真,不仅能够提升其设计效率和性能,还有助于对实际使用过程中的问题进行有效预测和解决。
本文旨在深入探讨履带式特种车辆的精细化动力学建模与仿真技术,以期为相关领域的研究提供一定的参考。
二、动力学建模(一)模型构建动力学建模是履带式特种车辆设计与仿真的基础。
针对履带式特种车辆的特性,采用多刚体动力学模型进行建模。
该模型考虑了车辆底盘、履带、负重轮等多个部分,并考虑了各部分之间的相互作用。
此外,还需考虑各种外界因素,如地面摩擦、地形坡度等。
(二)模型参数动力学模型中涉及的参数较多,主要包括各部分的质量、转动惯量、阻尼等。
这些参数需要通过实验或理论计算获得。
此外,还需考虑模型中的约束条件,如履带与地面的接触力、摩擦力等。
这些参数的准确获取对于保证模型的精度至关重要。
三、仿真分析(一)仿真环境仿真环境是仿真分析的基础。
本文采用专业的动力学仿真软件进行仿真分析,该软件可模拟各种地形和气候条件下的履带式特种车辆运动。
在仿真过程中,需根据实际需求设置仿真参数,如仿真时间、步长等。
(二)仿真结果通过仿真分析,可得到履带式特种车辆在不同地形和工况下的运动学参数和动力学参数。
这些参数包括速度、加速度、受力情况等。
通过对这些参数的分析,可了解车辆在不同条件下的性能表现,为车辆的优化设计提供依据。
四、精细化建模与仿真技术(一)精细化建模技术精细化建模技术是提高履带式特种车辆动力学模型精度的关键。
在建模过程中,需充分考虑车辆的几何形状、材料特性、外部干扰等因素对模型的影响。
此外,还需对模型进行验证和优化,以保证模型的精度和可靠性。
(二)仿真技术仿真技术是履带式特种车辆动力学仿真的核心。
在仿真过程中,需采用先进的算法和计算方法,以提高仿真的精度和效率。
汽车四轮转向建模与仿真研究的开题报告
一、研究背景
在现代汽车的设计中,四轮转向技术被广泛应用。
四轮转向技术能够改变汽车的转弯半径、提高行驶的稳定性和安全性,缩短刹车距离等。
因此,研究四轮转向技术
的建模与仿真,对于设计高性能的汽车具有重要意义。
二、研究目的
本研究旨在建立汽车四轮转向技术的模型,并基于该模型进行仿真研究,以探究四轮转向对于汽车操控性能的影响。
三、研究内容
1. 四轮转向的原理及分类
本部分主要对汽车四轮转向的原理和分类进行介绍和分析,包括四轮转向的种类、工作原理以及优缺点等。
2. 四轮转向模型的建立
本部分主要对四轮转向的建模进行研究,包括车辆动力学模型和转向系统模型,针对四个轮子做出相应的控制策略,通过建立数学模型描述转向系统的运动方程。
3. 四轮转向系统仿真研究
本部分主要以Matlab/Simulink为主要仿真工具,针对建立的四轮转向系统模型,进行运动控制系统及传动系统方面的仿真研究,对四轮转向系统进行测试和性能评估。
四、预期成果
本研究预期完成以下工作:
1. 分析和总结四轮转向技术的优缺点和应用场景;
2. 建立汽车四轮转向技术的模型并进行仿真研究;
3. 完成四轮转向系统的性能测试,并针对测试结果进行分析和总结。
五、研究意义
通过本研究,可以更好地理解和认识汽车四轮转向技术,为汽车制造业的发展提供新的技术支持。
此外,本研究的成果也为未来的汽车设计和控制系统开发提供了参考和借鉴,为提高汽车的性能和安全性做出了贡献。
《履带式特种车辆精细化动力学建模与仿真》篇一一、引言随着科技的进步和军事需求的不断升级,履带式特种车辆在各种复杂环境下的机动性能和作业效率显得尤为重要。
为了更好地研究其动力学特性,精细化动力学建模与仿真成为了当前研究的热点。
本文旨在探讨履带式特种车辆精细化动力学建模与仿真的方法,为车辆的设计、优化和性能评估提供理论支持。
二、履带式特种车辆动力学建模1. 模型假设与简化在建立履带式特种车辆动力学模型时,首先需要作出一些假设和简化,如忽略车辆外部因素如风阻等,仅关注车辆的移动、转向和动力传递等基本特性。
同时,需要分析车辆的各部分结构及相互关系,包括发动机、传动系统、履带系统等。
2. 动力学方程建立基于上述假设和简化,建立履带式特种车辆的动力学方程。
包括车辆的移动方程、转向方程以及各部分之间的力传递方程等。
这些方程将描述车辆在不同环境下的运动状态和受力情况。
3. 模型参数确定为了使模型更加准确,需要确定模型中的各项参数。
这些参数包括车辆的物理参数(如质量、惯性等)、环境参数(如地形、坡度等)以及动力系统参数(如发动机功率、传动比等)。
这些参数的准确获取对于模型的精度至关重要。
三、仿真方法与实现1. 仿真软件选择为了实现履带式特种车辆的精细化动力学仿真,需要选择合适的仿真软件。
目前,常用的仿真软件包括MATLAB/Simulink、ADAMS等。
这些软件具有强大的数学建模和仿真能力,能够满足履带式特种车辆的动力学仿真需求。
2. 仿真流程设计在仿真软件中,需要设计合理的仿真流程。
首先,根据实际需求设置仿真参数,如仿真时间、步长等。
然后,建立履带式特种车辆的动力学模型,并设置模型中的各项参数。
接着,进行仿真实验,观察车辆在不同环境下的运动状态和受力情况。
最后,对仿真结果进行分析和评估。
3. 仿真结果分析通过对仿真结果的分析,可以得出车辆在不同环境下的运动规律和受力特性。
同时,可以评估车辆的动力性能、机动性能和作业效率等。
2007年1月农业机械学报第38卷第1期履带车辆转向性能计算机仿真研究概况*曹付义 周志立 贾鸿社 【摘要】 履带车辆的转向性能是整车性能的重要评价指标,计算机仿真是研究转向性能的有效手段之一。
首先分析了履带车辆转向性能的影响因素,然后从履带与地面的相互运动关系、转向阻力、仿真性能等方面对履带车辆转向性能仿真研究的现状进行综述。
在此基础上,提出了履带车辆液压机械差速转向系统参数匹配、转向期间换挡规律、平稳转向性能、性能仿真模型、转向控制理论以及驾驶的遥控化与行驶自主化等履带车辆转向的研究思路。
关键词:履带车辆 转向性能 仿真 综述中图分类号:S219.203.23文献标识码:AResearch Summarization on Simulation of TurningPerformance of Tracked VehicleCao Fuyi 1 Zhou Zhili 2 Jia Hongshe3(1.X i 'an University of Technology 2.H e 'nan Univer sity of Science and T echnology 3.Yituo Group Coop eration )AbstractThe turning perform ance of tracked vehicle is its critical evaluating puter simulation study o f turning performance is o ne of the effective m eans.Firstly the factor s influencing the turning perfo rmance of tr acked vehicle are analy zed ,then the r esearch actuality of its turning performance are sum marized fro m the mo vement inter -r elation of track and soil ,turning r esistance,sim ulation perfo rmance.T he development in tur ning resear ch o f tracked vehicle is put forw ard from the par am eter m atching of hydr o-mechanical differential steering sy stem ,shift schedule under tur ning ,statio nary turning performance ,simulatio n mode ,tur ning co ntrol theor y,rem ote co ntro l and independent steer ing etc.Key words Tracked vehicle,Turning perform ance,Simulation,Research summarization收稿日期:2005-11-09*河南省杰出人才创新基金资助项目(项目编号:0121001400)曹付义 西安理工大学机械与精密仪器工程学院 博士生,710048 西安市周志立 河南科技大学车辆与动力工程学院 教授 博士生导师,471003 洛阳市贾鸿社 中国一拖集团技术中心 教授级高级工程师,471003 洛阳市 引言履带车辆的转向性能作为整车性能评价的重要方面,不仅直接反映了履带车辆的行驶机动性、准确性,而且也影响着履带车辆的动力性、稳定性和作业效率。
基于履带车辆稳态转向性能分析与试验本文从网络收集而来,上传到平台为了帮到更多的人,如果您需要使用本文档,请点击下载按钮下载本文档(有偿下载),另外祝您生活愉快,工作顺利,万事如意!1 转向模型基本假设及坐标系基本假设条件1)地面为硬路或铺装路,不计履带的沉陷以及履带板在侧向方向的推土效应。
2)水平路面均匀稳态转向,两侧履带接地压力为均匀分布。
3)不计履带宽度及张力变化对履带接地压力的影响,并假设履带为不可拉伸的均匀柔性带。
4)履带车辆转向时的行驶阻力系数与直线行驶时相同。
5)转向时履带上任意一点的剪切应力与该点的剪切位移量相关,其表达式为τ=τmax(1-e-j/K),其中τmax为履带与地面之间的最大剪切应力;j 为地面土壤的剪切位移量;K 为土壤抗剪模量,且剪切应力方向与该点的滑动速度方向相反。
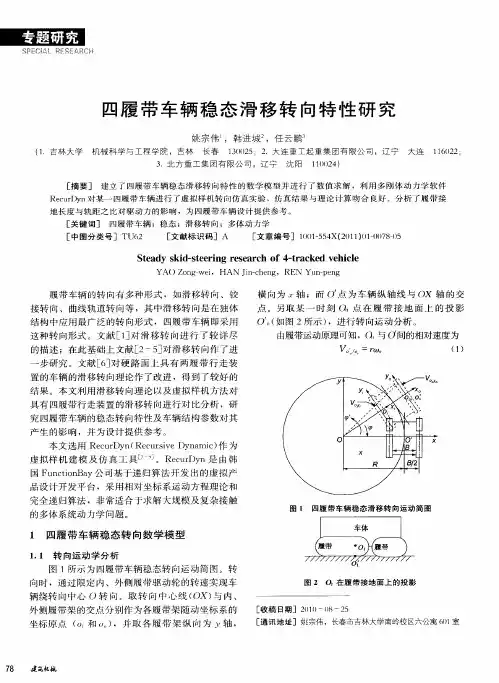
坐标系描述为研究履带车辆的转向特性,假定履带车辆在转向过程中作 3 自由度平面运动,如图 1 所示为履带车辆转向运动学简图。
在水平地面上建立惯性坐标系XOY,并以履带车辆转向中心线与车体纵向中心线的交点o 为坐标原点建立固结于车体上的连体坐标系xoy。
2 履带车辆转向模型的试验验证以某型履带式装甲车辆为对象,基于建立的履带车辆转向动力学模型,仿真分析履带车辆的稳态转向性能,并根据试验结果对转向动力学模型进行验证。
高速侧履带滑转率σ2及低速侧履带滑移率σ1的模型计算结果与试验结果分别随车辆实际转向半径R 的变化关系曲线。
从图中结果对比可见,两侧履带滑转率和滑移率的计算结果与试验结果从总体变化趋势上具有良好的一致性。
无论是从测试结果还是从两个转向模型的计算结果都可以看出,滑转率和滑移率均具有随履带车辆转向半径的增大逐渐减小的变化趋势。
为了进一步验证转向模型的准确性,给出了履带车辆在砂土路面上转向时,在两个不同的转向半径下,车辆的转向性能参数的仿真计算与试验测试对比结果。
3 结论对比研究了基于剪切应力-剪位移关系转向模型计算结果与基于库仑摩擦力转向模型计算结果的差异。
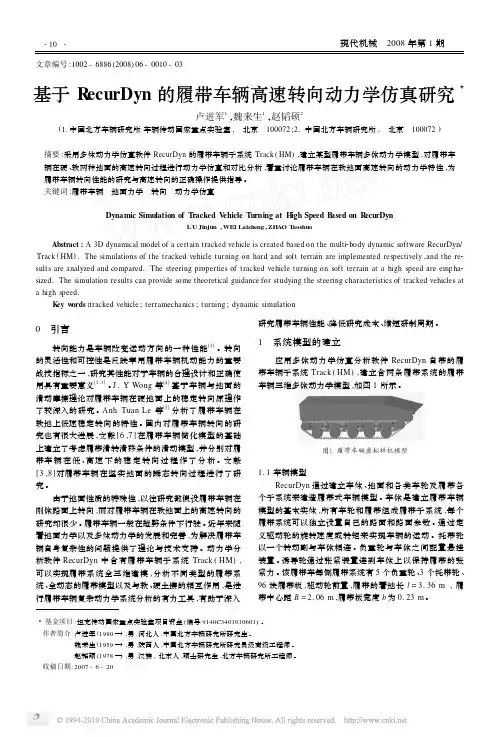
基于AMESim和RecurDyn的履带车转向系统联合仿真分析履带车转向系统是指通过对车辆履带进行差速运动以实现转向的一种方式。
其中,AMESim和RecurDyn可以被用于联合仿真分析。
AMESim是一款基于系统动力学理论的多学科仿真软件。
它可以用于建立高度集成的系统模型,包括机械、液压、热、电等方面。
AMESim的仿真代码能够在非常短的时间内执行快速的仿真,并精确地预测系统的动态响应。
RecurDyn则是一款以多体动力学为基础的仿真软件。
RecurDyn建模按照模型的自由度来进行,从而使得模拟结果准确度更高。
同时,RecurDyn也支持封装好的子系统模块,将不同的子系统部分组合在一起,就可以形成一个完整的系统模型。
通过对此两款软件的基本介绍,我们可以得到集成使用AMESim和RecurDyn的履带车转向系统的基本框架。
具体分析如下:首先,根据履带车转向系统的基本工作原理,可以得到系统模型的建模方案。
在这个建模过程中,首先需要考虑的是履带车的运动学模型。
此模型应能够描述履带车行驶过程中的速度、方向变化以及需要控制的转向系统参数。
这一部分的具体建模涉及方程的推导,可以采用MATLAB或Simulink等工具来实现。
接下来,需要建立由AMESim编制的动力学模型。
此模型描述了系统的物理动态行为,如机械运动、传感器输出、力和驱动器输入。
在AMEsim中,需要将此系统分解为各个子系统或组件,例如电动机、输出轴、减速器和传感器等。
此外,还要考虑与系统相连的其他元素,例如电池、控制器和采样器等。
然后,在RecueDyn中,需要创建由AMESim导出的子系统模型。
这个模型包括运动学、动力学和控制元素。
当模型被创建后,可以将其导出为一个单独的模块,并集成到RecurDyn模型中。
ReucrDyn还提供了一个工具箱,用于模拟诸如差速器、转向节和驱动轴等履带车系统的运动。
通过这些工具箱,可以实现对整个系统的仿真分析,以得到实时的物理行为和响应。
履带车辆转向机构的研究现状及发展趋势下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!履带车辆转向机构的研究现状及发展趋势引言履带车辆作为重要的军事和工程机械,在军事作战、工程施工、野外探索等领域发挥着关键作用。