基于Matlab+Simulink平台的直升机飞行实时仿真研究
- 格式:pdf
- 大小:6.40 MB
- 文档页数:91
直升机飞行控制系统动态建模与仿真一、引言直升机是一种垂直起降的飞行器,在现代社会中扮演着重要的角色,广泛应用于军事、民用、医疗、物流等领域。
其飞行控制系统的设计和开发具有十分重要的意义。
直升机的飞行控制系统包括机械设计部分和电子控制部分。
机械设计部分主要包括主旋翼叶片、尾旋翼、机身结构等,而电子控制部分则主要包括传感器、执行器、控制器等。
其中,飞行控制系统的设计不仅需要考虑直升机的稳定性、可靠性和飞行性能等问题,还需要考虑到其复杂的结构和多变的工作环境。
本文旨在通过动态建模和仿真的方法,分析直升机飞行控制系统的工作原理和控制机理,进而提高其稳定性和可靠性,为直升机的应用提供技术支撑。
二、直升机的基本结构直升机是一种可以垂直起降的旋翼飞行器,它具有以下基本结构:(1)旋翼系统旋翼系统是直升机的主要部分,包括主旋翼和尾旋翼。
主旋翼通过旋转产生升力和推力,使直升机获得升力和前进动力。
尾旋翼主要用于平衡机身的姿态和控制机身的方向。
(2)机身结构机身结构是直升机的框架,承担着旋翼系统和发动机的重量。
机身结构的主要材料是铝合金、钛合金、复合材料等。
(3)发动机发动机是直升机的动力系统,一般采用燃气轮机或柴油机。
发动机的功率主要决定着直升机的飞行性能和载荷能力。
(4)电子控制装置电子控制装置是直升机的核心部件,主要负责控制旋翼系统的运动和控制机身的姿态。
电子控制装置包括传感器、执行器和控制器等。
三、直升机控制系统的组成直升机的控制系统由传感器、执行器和控制器三部分组成。
(1)传感器传感器是直升机控制系统的输入部分,可以测量飞机的姿态、速度、位置和加速度等参数。
传感器的主要类型包括角速度陀螺仪、加速度计、地磁传感器、气压计等。
(2)执行器执行器是直升机控制系统的输出部分,根据控制器的指令对飞机进行姿态控制和位置控制。
执行器的主要类型包括电动舵机、平衡阀、电动水平面和液压阀等。
(3)控制器控制器是直升机控制系统的核心部件,它接收传感器的信号,计算控制指令,并将其发送给执行器进行控制。
基于Matlab/Simulink的飞行器全数字仿真平台的设计摘要:针对飞行仿真的研究通常会忽略仿真模型或平台的通用性、可重性及互操作性等问题,采用对所设计仿真平台的功能进行详细划分和描述,构建总体仿真系统框架的措施来解决这些问题。
首先,在matlab环境下建立飞行器全数字仿真平台,利用该平台可以进行动力学分析、飞行控制系统设计及航迹规划等不同任务。
其次,利用matlab 提供的gui 接口实现人机交互界面的设计的设计。
所设计平台模块的划分相对独立,人机交互界面可修改飞行器的相关信息,具有较强的通用性。
关键词:matlab/simulink gui 飞行控制数字仿真仿真平台中图分类号:v274 文献标识码:a 文章编号:1674-098x(2013)02(c)-00-01飞行器可以被应用于运输、救生、对地观测、空中预警以及通讯中继,因此其在军事和民事领域中都有很大的应用前景。
因此对飞行器进行仿真分析很有必要,同时仿真也是对飞行器的动力学特性分析、控制律设计等工作的重要手段。
matlab作为一种面向科学计算、可视化以及交互式程序设计软件。
它将数值分析、矩阵计算、科学数据可视化以及非线性动态系统的建模和仿真集于一身,为科学研究、工程设计以及必须进行有效数值计算的众多科学领域提供了一种全面的解决方案。
simulink是matlab提供的仿真工具,可以方便地进行动态系统建模、仿真、分析等。
该文基于matlab gui建立飞行器的全数字仿真平台。
利用该平台可以快速地进行用飞行器的全数字仿真,根据参数设置的不同进行航迹规划、实时状态参数显示和仿真结果显示等仿真工作。
1 仿真系统框架设计仿真系统可分为导航和控制模块、执行模块、飞行器动力学模块和人机交互界面模块。
其中导航控制模块又分为航迹规划模块、接受指令模块、飞行管理系统、导航系统及控制系统五个子模块,导航子模块把飞行器的状态信息传给飞行管理系统,飞行管理系统根据航迹规划的要求处理后给出模态控制信号从而控制着飞行器的飞行,执行模块由舵机模型组成。

International Conference on Advances in Mechanical Engineering and Industrial Informatics (AMEII 2015)Design and Implementation of UAV Flight Simulation Based onMatlab/SimulinkZheng Xing1,a, Yang He2,b, Cheng Jian1,c1Wuhan Mechanical Technology College, Wuhan, 430075, China2Hubei University of Education, Wuhan, 430205, Chinaa email:********************,b email:*****************,c email:**************************omKey words: UAV, Simulation Training, Matlab/Simulink, Flight Simulation, Mode SwitchAbstract.This paper elaborates the composition and function of the flight simulation system according to characteristics of UAV flight simulation in simulation training device. Flight control model and navigation model are designed based on the Matlab/Simulink to solve mode switch and other key technical difficulties in software.IntroductionUA V has been one of important weapon equipment in modern wars and has been widely used in civil areas. As the UA V plays a more and more important role, while accelerating R&D and equipping of advanced UA V system, countries worldwide pay more attention to research of training system and methods based on practical requirements in order to enhance UA V application performance. Currently, extensive developments and applications have been conducted for UA V simulation training systems of different types. The first aim is to improve the ability of flight personnel through simulation training. In order to implement real flight control training, a flight simulation environment should be established[1]. When the effect of flight simulation is closer to real UA V flight status, UA V control personnel’s skills will be improved more.Composition of Flight Simulation SystemFlight simulation computer hardware is composed of an IPC which communicates with system equipment via network port or serial port[2].The software platform is based on general-purpose Windows operating system. In order to simulate the real-time control function of a stabilized turntable, Ardence RTX products will be used. This product offers a real-time subsystem on Windows platform to ensure real-time control, tracking and response on Windows platform. Software consists of two parts: flight control model and navigation model.The former performs digital simulation of real devices of aircraft including aerodynamic device, flight-control computer, actuator, vertical gyro, rate gyro and magnetic heading sensor; the latter controls the UA V to fly at the designated flight path.Design and Implementation of Flight SimulationFor flight control model and navigation model, the mathematical simulation method is used to simulate real devices including flight-control computer, navigation computer, aircraft power and aerodynamic systems and actuator.Development tool.Graphical simulation modeling tool and simulation programming language are mainly used for modeling, and it is Matlab/Simulink that represents a combination of them. The modeling and debugging for the whole flight simulation including aircraft model, control law, sensor model and actuator model are implemented by Matlab/Simulink[3]. Aircraft model and sensormodel can be selected from Simulink model library [4]. For the control law module, S function interfaces written in C/C++ language provided by Simulink can be used to implement mixed programming of Simulink and C/C++ language; then the model can be easily modified and debugged by calling S function written in C/C++ language and making good use of Simulink visual modeling capability.Composition and function. The whole simulation model consists of flight control model (which is used to simulate dynamic characteristics of the aircraft) and navigation model. A six-DoF nonlinear model of aircraft is established based on aerodynamic data. The key to sensor model in the flight control model is how to simulate sensor noise accurately. According to physical properties of the sensor, noise signals are superposed at the output end of the sensor to simulate measured signal noise and error. Dead area, saturation and other nonlinear factors often exist in the actuator. So in the model, dead area and saturation parameters are properly set to simulate the actuator.Flight control model. In a real UA V system, the flight control system is an integrated controller responsible for coordinating and managing all subsystems of the UA V , and is also the core of UA V flight management and control. Therefore, the implementation of the flight control module is a basic and key part in UA V flight simulation.Mathematical modeling. To research into UA V flight control, we first have to establish a model for the research object. In modeling, the following assumptions are always made: the Earth is the inertial reference system; the aircraft is a rigid body; the weight is a constant; and acceleration of gravity does not change with flight altitude. By reference to airframe coordinates, six dynamic differential equations are established to describe the movement of aircraft.[5] The said equations are complex in structure, so they are only suitable for numeric calculation. For the convenience of controller design, a small-disturbance linearized method can be used to obtain the small-disturbance linear state equation of UA V at the equilibrium point.[6] Furthermore, the aircraft is symmetrical, so linear results are divided into two groups, which describe longitudinal movement and lateral movement, respectively. Therefore, five control modes are established for flight control model, including elevation holding and control, altitude holding and control, roll angle holding and control, course angle holding and control, lateral deviation control.The longitudinal small-disturbance linear equation of UA V with wind disturbance is: [7] X AX BU Fd =++where, 100001000010T F = ; 000x y zW V W U d q W x α−∆==∆∆∂∂ ; U 0 is airspeed component along the vertical axis;W x , W y and W z are three components for wind speed; X = [ΔV Δα q Δθ]T ; U = δe .The lateral small-disturbance linear equation of UA V with wind disturbance is: X AX BU Fd =++ where, 100001000010T F= ; 00z y x W U W z d p r W z β∆∂∂==∆∆∂∂ ; U 0 is airspeed component along the vertical axis; W x , W y and W z are three components for wind speed; []T X p βψγ= ; []T a r U δδ=.Design of control law. PID controller is used for the module. The system is under error-based negative feedback control. The controller takes the difference between system output feedback quantity and an expected value or a set value as the input quantity, and with an algorithm, obtains a control quantity to make the output quantity change with the input quantity.[8]Take the design of longitudinal pitch channel of aircraft as an example. The pitch angle and pitch rate feedback are used for pitch attitude holding and control of the aircraft. Pitch rate feedback is realized by the angular rate compensator and the pitch angle is measured by the sensor. The throttle opening is temporarily deemed to be constant, and is not taken into account. Then, the pitch channelcontrol model is designed with Simulink tool kit in Matlab.Navigation model. The navigation system is an integral part of the UA V system. It is capable of providing support for tactical operations of the UA V through satellite navigation, AWACS guiding, ground guiding and UA V capability of detecting and tracking targets. It is mainly used to implement real-time location and automatic control of flight path of the UA V.UA V’s navigation function is based on the coordinated turn function.[9]First, the system determines the current course of an aircraft according to voyage points, measures and calculates the lateral deviation distance between aircraft and flight path, track deviation angle and current ground velocity of aircraft in real time, and then solves a lateral driving signal in accordance with the navigation control law, and gives a bank angle to control the aircraft to enter coordinated turn, and when both lateral deviation distance and track deviation angle are zero, the aircraft performs a straight and level flight along the current flight course until it enters the next point.The simulation of navigation control law is based on flight control law simulation. The navigation control law is designed by integrating each separate channel into full dimension simulation and taking cross track distance and yaw angle as input values.Implementation of Simulation Technology DifficultiesThe flight simulation system is very close to a real system, but different from the real system. In simulation training, UA V is required to perform some extreme actions and random switch among modes, and humanity principle shall be followed during the training. This leads to considerable difficulty and many logical problems in programming. The whole module is of purely digital analog, so mode switch in real-time module may involve problems about zero clearing of many integral terms. In case of failure in timely zero clearing, accumulated values will affect the whole flight simulation result, and even cause systematic divergence, so that the control law could not be successfully implemented. Mutual independence of longitudinal channel and lateral channel is used. When receiving a command about changing longitudinal movement, the system only clears integral terms under longitudinal control, and integral terms under lateral control will keep accumulating until a command about changing lateral movement is received. Zero clearing of lateral integral terms is performed in a similar way.Abovementioned processes will both satisfy requirements of practical simulation training and show simulative extreme action simulation, thereby training operator’s emergency response capability.ConclusionThe flight simulation design of the simulation training device is implemented in the abovementioned method. According to the simulation result, control of modes of the aircraft meets specification requirements, the transition process during switch among modes is stable and the flight profile trend coincides. The design model can truly simulate UA V flight control and navigation and implement real-time simulation of pre-flight preparation, launch, cruising, program-control, manual control, mode switch and recovery controlled by the ground console. It has high confidence level and reliability in simulation, strong expandability and wide application. AcknowledgementThis work is supported by the natural science foundation of Hubei Province No.2014CFB569. This work is also supported by the research project of Hubei Province Department of Education Grant No.Q20133008.References[1] Peng Hua, Shen Weiqun, Song Zishan, A Real-time Management System of Flight SimulationBased on VxWorks, Journal of System Simulation, 2003, 15(7): 966-968.[2] Zhang Ning, Chen Ning, Ji Yun, Zhu Jiang, Research on The Integrated Method of FlightSimulation System Based on A Flight Simulator, Flight Dynamics, 2010, 28(3): 39-42.[3] Zhang Lei, Jiang Hongzhou, Qi Panguo, Li Hongren, Flight Simulation Based on Matlab,Computer Simulation, 2006, 23(6): 57-61.[4] Shang Wenxuan, Wang He, Gao Ya, The Avionic System Platform Based on Flight Simulationof Simulink and Its Application, Electronics Optics & Control, 2014, 21(8): 6-9.[5] Zhang Minglian, Flight Control System, National Defense Industry Press, 1993.[6] Xu Hailiang, Li Junyang, Fei Shumin, Design and Implementation of Digital Flight SimulationPlatform, Journal of Southeast University(Natural Science Edition), 2011, 41(1): 113-117. [7] Su Jijie, Zheng Xing, Lin Dongsheng, Yang Yi, Design and Implementation of SimulativeTraining System for UAV, Journal of System Simulation, 2009, 21(5): 1343-1346.[8] Li Chao, Wang Jiangyun, Han Liang, Development of Fixed Wing Aircraft Flight SimulationSystem Based on Matlab, Journal of System Simulation, 2013, 25(8).[9] Gen Tongfen, Huang Daqing, Full Process Simulation of UAV Auto-pilot Flight Based onSimulink, Aeronautical Computing Technique, 2010, 40(5): 112-116.。
南京航空航天大学硕士学位论文摘要无人直升机飞行控制系统设计离不开数字仿真和半物理仿真验证,利用这些仿真可以极大程度上避免试飞验证过程中的事故风险、缩短研制周期、降低成本。
本文应用MATLAB/RTW 技术,设计构建了一套基于RTW与VxWorks的直升机飞行控制建模与实时仿真一体化软件环境,同时为提高仿真精度,研究了直升机非线性飞行动力学建模技术。
在直升机飞行控制建模与实时仿真一体化软件环境设计研究中,针对直升机飞行控制实时仿真的具体要求,设计了飞行控制仿真系统的硬件架构与软件组成,讨论了通信机制和具体应用;在深入剖析MATLAB/RTW技术的基础上,结合Tornado软件,建立了针对VxWorks嵌入式目标的软件交叉开发环境,并详细说明了相关文件、属性在软件开发环境建设中的作用与修改方法;根据飞控系统仿真目标机实现的功能,对目标机软件应用层任务进行划分,分析了应用层任务程序在Simulink环境下的设计要点、设计方法和实现形式,重点论述了模型任务定时驱动机制和IO设备输入输出任务的设计与实现,介绍仿真系统的执行流程,给出实验测试样例,验证所设计的一体化软件环境的可行性与可靠性。
在直升机飞行动力学建模技术研究中,讨论了一种适用于定常低速飞行状态下的直升机非线性飞行动力学建模方法,其中着重推导了引入Pitt和Peters的一阶谐波动力入流理论的旋翼桨盘运动模型。
设计编写了针对UH-60A的配平与线性化软件和Simulink环境下该直升机非线性飞行动力学模型的S函数模块,获得了直升机静态配平与动态操纵响应的仿真结果,并与实际试飞数据进行对比,验证了本文所建模型的合理性。
关键词:直升机,飞行控制,实时仿真,半物理仿真,RTW,VxWorks,飞行动力学建模iABSTRACTThe design of unmanned helicopter flight control system is inseparable from digital simulation and physical semi-simulation, using the simulation test can be a great extent to avoid the risk of accidents in the verification process, shorten the development cycle and reduce costs. In this paper, using MATLAB / RTW technology, the author designed and constructed a RTW and VxWorks-based software environment unified helicopter flight control modeling and real-time simulation. In order to improve the accuracy of flight control simulation, the author maked a research into the non-linear helicopter flight dynamics modeling.During the research of software environment unified flight control modeling and real-time simulation, in accordance with the specific requests, the author designed the hardware architecture, software components and communication structure of simulation system. By intensively analyzing of MATLAB / RTW technology, the author established software cross-development environment aiming at VxWorks embedded target, and introduced details of the relevant documents and property in the development of software environment. According to the functional requirements of flight control system simulation target machine, the author completed the division of the application-level tasks, analyzed the gist, method and realizing format of task program under Simulink environment. The timing driving of model tasks and the input and output of IO devices were focused discussion. The author has analyzed the feasibility and reliability of the software environment in accordance with simulation executive procedure test.In the research of helicopter flight dynamics modeling, the author discussed a modeling method of helicopter nonlinear flight dynamics for low speed and steady state, focusing on the derivation of blade plate motion model which introduced Pitt and Peters’s first-order harmonics rotor dynamic inflow theory. The author also developed trim and linear software and non-linear flght dynamics model based on s-function for UH-60A helicopter. Compared with data of the flight test, the author verify the validity of the flight dynamic model .Key Words:Helicopter,Flight Control,Real-Time Simulation,HIL,RTW,VxWorks,Flight Dynamics Modeling图清单图1. 1各阶段直升机代表机型 (1)图1. 2无人直升机代表机型 (2)图2. 1数学仿真、实时数字仿真与半物理仿真相互联系 (7)图2. 2飞控系统实时数字仿真原理 (8)图2. 3 飞行控制仿真系统硬件架构图 (8)图2. 4 飞行控制仿真系统硬件架构扩展图例 (9)图2. 5飞行控制仿真系统软件组成示意图 (9)图2. 6 飞行控制仿真系统软件构成图 (11)图2. 7 仿真系统通信方式 (13)图3. 1外部模式原理图 (15)图3. 2 RTW功能结构图 (16)图3. 3程序创建过程示意图 (17)图3. 4模型代码执行过程 (18)图3. 5宿主机与目标机关系 (19)图3. 6 Build Boot Rom对话框 (22)图3. 7 VxWorks组件配置界面 (22)图3. 8 Target Server设置对话框 (23)图3. 9设置系统目标文件 (24)图3. 10设置求解器 (26)图3. 11设置数据交互界面 (26)图4. 1飞控仿真目标机基本功能 (28)图4. 2目标机软件总体结构和模块组成 (29)图4. 3飞控仿真目标机软件应用层任务关系图 (30)图4. 4飞控仿真目标机软件模块设计图例 (31)图4. 5 Atomic Subsystem模块封装周期任务 (31)图4. 6高频任务向低频任务传递数据 (32)图4. 7高频任务向低频任务传递数据 (32)图4. 8使用S函数集成客户代码 (33)图4. 9基于优先级抢占的任务调度算法图例 (35)图4. 10同一优先级时间片轮转调度算法图例 (35)南京航空航天大学硕士学位论文图4. 11设置main函数模板 (38)图4. 12基于优先级的多周期任务调度机制图例 (39)图4. 13 基于有限状态机的帧同步原理 (41)图4. 14 与仿真执行相关的操作 (42)图4. 15 模型文件根目录 (43)图4. 16 自动生成源文件所在目录 (43)图4. 17验证试验原理图 (44)图4. 18验证环境现场照片 (44)图4. 19实验进行时宿主机桌面截图 (44)图4. 20串口端无数据到达时目标机软件执行时序图 (45)图4. 21串口端有数据到达时目标机软件执行时序图 (45)图5. 1直升机飞行动力学建模基本组成 (46)图5. 2 直升机常用坐标系 (47)图5. 3二维翼型气流环境 (48)图5. 4 UH-60A配平与线化工具软件 (56)图5. 5 UH-60A开环数学模型 (57)图5. 6 UH-60A直升机静态配平数据 (58)图5. 7 UH-60A直升机动态响应数据(总距上提0.5-in,100knots) (59)vii直升机飞行控制实时仿真研究表清单表3. 1目标机硬件结构特征 (20)表3. 2 BootLine参数定义 (21)表3. 3 MATLAB提供的系统目标文件 (23)表3. 4 模板联编文件相关参数 (25)表4. 1 Custom Code模块 (34)表5. 1 UH-60A直升机飞行试验主要数据 (55)南京航空航天大学硕士学位论文ix注 释 表缩略词:RTOS Real-Time Operation System实时操作系统 TLC Target Language Compiler目标语言编译器 BSP Board Support Packet板级支持包 ODE Ordinary Differentical Equcations常微分方程 FIFO First In First Out先入先出 A/D Analog to Digital模拟/数字 D/A Digital to Analog数字/模拟 符号:b M 桨叶质量矩 p β桨叶预置挥舞角 k β 挥舞铰阻尼 w β旋翼侧滑角 0θ 桨根安装角 tw θ桨叶负扭转 χ 旋翼尾迹角 π圆周率 p 滚转角速度 q俯仰角速度 c θ 横向周期变距 r偏航角速度 s θ 纵向周期变距 p滚转角加速度 μ 前进比 q俯仰角加速度 β 桨叶挥舞角 w p风轴系下滚转角速度 0β 桨叶锥度角 w q风轴系下俯仰角速度 c β 桨叶纵向周期挥舞 w p风轴系下滚转角加速度 s β 桨叶横向周期挥舞 w q风轴系下俯仰角加速度 e 挥舞铰偏置量 P U桨叶剖面垂向速度 b I 桨叶绕挥舞铰惯量 T U桨叶剖面切向速度 R 旋翼半径 0ν桨盘中心诱导速度 ρ 大气密度 c ν诱导速度一阶余弦分量 a 翼型升力线斜率 s ν诱导速度一阶正弦分量 c 桨叶弦长 1k变距挥舞耦合系数 Ω 旋翼转速 γ洛克数 r 桨叶径向位置 c λ入流比 t C 拉力系数 φ滚转角直升机飞行控制实时仿真研究C l滚转力矩系数 θ 俯仰角 C m俯仰力矩系数 ψ 偏航角 X I绕x 轴全机惯性矩 XY I 对xy 平面全机惯性积 Y I绕y 轴全机惯性矩 XZ I 对xz 平面全机惯性积 Z I 绕z 轴全机惯性矩 YZ I 对yz 平面全机惯性积承诺书本人郑重声明:所呈交的学位论文,是本人在导师指导下,独立进行研究工作所取得的成果。
基于Simulink的飞行模拟器操纵负荷系统仿真设计发布时间:2023-02-01T06:35:31.724Z 来源:《科学与技术》2022年第16期8月作者:惠立[导读] 操纵负荷系统作为飞行模拟器至关重要的组成部分,能提供真实操纵力感的模拟,随着伺服控制技术和力矩电机性能的提升,操纵负荷系统逼真度和可靠性的需求也越来越强,在开展详细设计之前,有必要对操纵负荷系统进行全数字仿真,以优化设计、及早发现问题、规避技术风险。
惠立中航西安飞机工业集团股份有限公司陕西西安 710089摘要:操纵负荷系统作为飞行模拟器至关重要的组成部分,能提供真实操纵力感的模拟,随着伺服控制技术和力矩电机性能的提升,操纵负荷系统逼真度和可靠性的需求也越来越强,在开展详细设计之前,有必要对操纵负荷系统进行全数字仿真,以优化设计、及早发现问题、规避技术风险。
本文基于Simulink仿真环境,通过对某型飞行模拟器的操纵负荷系统进行全数字仿真,并设计相应PID控制器,为操纵负荷系统的设计研究提供仿真方法和思路。
关键字:飞行模拟器;操纵负荷系统;仿真;PID;引言近年来,飞行模拟器凭借其经济性、高安全性和可重复性的特点在飞行训练和飞机设计领域越来越多地得到应用,而操纵负荷系统是真实飞机操纵系统的模拟与仿真,其本质上是一套力矩加载系统,能逼真地复现飞机在不同飞行条件下的操纵特性,操纵负荷系统性能好坏直接影响飞行员的训练,影响对飞行模拟器飞行品质的评定。
本文首先介绍力感模拟实现的工作原理;随后在此基础上进行数学建模,主要包括2部分:一是模拟器伺服加载系统的数学模型,二是产生模型力的飞机操纵系统的数学模型;最后在Simulink环境下开展操纵负荷系统仿真设计。
1.工作原理操纵负荷系统是由操纵负荷计算机、驱动单元、执行机构和反馈单元等几部分组成的,操纵负荷系统工作原理如图1所示,当操纵驾驶杆时,操纵负荷计算机接收驾驶杆实时位置信号,并接收主飞行仿真计算机的飞行状态、大气环境等外部信号,经操纵负荷模型的计算,生成模型力(模型回路),将模型力与获取的实测力进行,再对力偏差按照PID调节规律进行调整,输出控制信号,通过电机驱动器,驱动力矩电机实现对操纵机构的加载,使当前实际杆力和模型力实时趋于一致,从而实现力感的逼真模拟(控制回路)。
基于Simulink的直升机实时飞行仿真模型开发蔡伟健【摘要】本文描述了基于MATLAB/Simulink进行直升机飞行仿真模型的构建方法,验证过程,并通过Real-Time Workshop(RTW)工具自动生成C++代码,进行一定的二次开发后形成飞行仿真软件,然后集成到直升机飞行模拟器中进行联合调试,完成对特定型号直升机的飞行性能和操纵品质的模拟.最终,根据CCAR-60的相关要求,对仿真模型进行客观测试评估.【期刊名称】《科技视界》【年(卷),期】2019(000)009【总页数】3页(P20-22)【关键词】直升机;实时仿真;自动代码生成【作者】蔡伟健【作者单位】中国直升机设计研究所,江西景德镇 333000【正文语种】中文【中图分类】V212.40 引言直升机飞行模拟训练设备(FSTD)包括飞行模拟机(FFS)、飞行训练器(FTD)和综合程序训练器(IPT)等。
在飞行模拟训练设备的研制中,飞行仿真模型是其核心的组成部分,对模拟器的逼真度起到了关键作用。
在相关标准中,对模拟器的客观测试大部分也都是针对飞行仿真模型的,主要包括飞行性能和飞行品质两大部分。
目前国内外建立飞行仿真模型的方法基本上都是采用部件法分别建立旋翼、尾桨、机身、起落架等的部件模型,基于力学原理进行物理建模。
完成基础模型的构建后,根据试飞数据和飞行员主观评估对模型进行参数调整,反复迭代,最终达到满足鉴定标准的相关要求。
国外已经有很多用于直升机飞行仿真模型开发的软件平台,包括FLIGHTLAB [1]、GENHEL [2]、ARMCOP [3]等,在飞行力学模型、飞行控制系统、视景系统等方面都自成体系,甚至,有些直升机设计过程中所需完成的计算也可以通过这些软件平台来完成。
但所有的建模过程均需要在平台规定的范围内完成,可做的核心部分调整非常有限,这对于建立功能完善的飞行模拟训练设备来说是一个很大的障碍。
借助于MATLAB/Simulink 平台,使用直升机空气动力学、飞行力学、涡轮轴发动机、飞行控制技术等相关理论,也可以搭建直升机飞行动力学模型、发动机模型,飞控系统模型等。
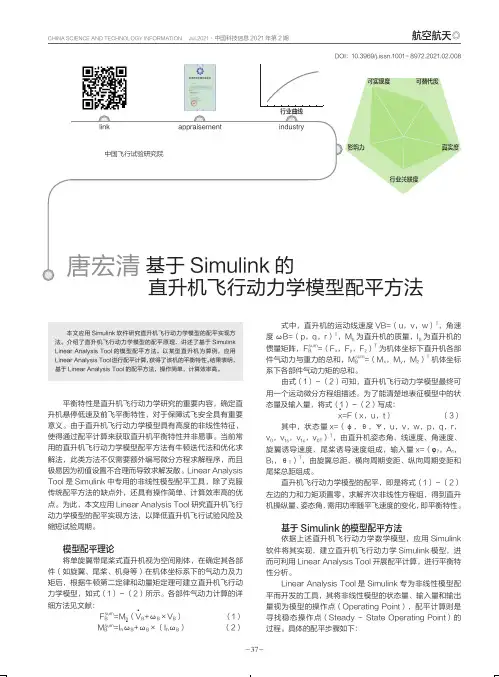
link appraisement 中国飞行试验研究院中国科技信息2021年第2期·CHINA SCIENCE AND TECHNOLOGY INFORMATION Jul.2021◎航空航天(1)设置模型的输出量。
式(3)仅明确了模型的状态量和输入量,所以还需设置模型的输出量。
若输出量设置合理,不仅可以方便后续的约束添加,还有利于配平计算结果输出。
例如,可将地速设置为模型输出量,以便添加配平的速度约束。
(2)添加操作点约束。
配平的操作点约束包含状态量约束、输入量约束和输出量约束,约束的具体形式表现为操作点的自身值(Known)和取值范围(Minimum、Maximum)。
若是状态量,还可约束其导数(SteadyState)的取值。
(3)调用findop函数求解。
若操作点约束设置合理,配平开始之后,Linear Analysis Tool调用findop函数解算出满足当前约束条件的稳态操作点。
上述步骤的关键在于操作点约束的添加。
实际配平时,一般仅对状态量和输出量添加约束。
结合直升机实际飞行时的平衡状态,配平时的状态量约束包含:所有状态量的导数约束为0,偏航角的自身值约束为0°。
输出量约束则是将地速的自身值设置为0m/s(悬停配平),或将地速X方向的自身值设置为给定值(稳定前飞配平)。
Linear AnalysisTool提供对话框和Matlab代码形式的配平,如果需要循环多次配平,则需要使用代码形式的配平方法。
由上可知,基于Linear Analysis Tool的配平,操作简单形象。
再者,得益于强大的操作点求解函数findop,其对求解初值要求低,且求解速度快。
本文将Simulink LinearAnalysis Tool应用于直升机飞行动力学模型的配平,不仅可以简化配平过程,还能极大地提高配平效率。
计算实例与结果本文以某型无人直升机为算例,应用Linear AnalysisTool对该机进行海平面内的悬停及前飞配平,获得该机的稳态操作点(即操纵量和姿态角)如下(图1~2)。
利用Simulink实现飞行体运动的虚拟现实
崔敏;马铁华
【期刊名称】《计量与测试技术》
【年(卷),期】2004(031)010
【摘要】该文建立了某飞行体运动的Simulink的仿真模型,并利用虚拟现实工具箱(virtual reality toolbox)实现了对飞行体运动的虚拟现实.MATLAB的虚拟现实工具箱提供逼真的可视化和交互性进行模拟仿真, 有利于复现飞行体真实的运动过程.
【总页数】2页(P29-30)
【作者】崔敏;马铁华
【作者单位】华北工学院;华北工学院
【正文语种】中文
【中图分类】TB942
【相关文献】
1.3-PTT并联机构运动仿真的Simulink实现 [J], 汪汇
2.利用Simulink实现船舶运动的虚拟现实 [J], 陶醉;杨继红
3.利用功率键合图和SIMULINK实现溢流阀的动态仿真 [J], 胡勇;周建军;贾方
4.基于Matlab及Simulink的虚拟现实技术的实现 [J], 范太华;毕国堂;刘敏贤
5.利用MATLAB/SIMULINK实现卫星通信链路仿真 [J], 胡卓宇;谭哲
因版权原因,仅展示原文概要,查看原文内容请购买。
link appraisement航空工业直升机设计研究所顾新,男,汉族,江西景德镇,航空工业直升机设计研究所飞行控制及工程仿真研究室,研究方向:飞行仿真。
顾 新图1 飞行动力学仿真系统组成CHINA SCIENCE AND TECHNOLOGY INFORMATION Mar .2019·中国科技信息2019年第6期航空航天◎变距角和尾桨变距角;旋翼气动模块、尾桨气动模块、机身气动模块、起落架动力学模块接收飞控系统模块的变距角、姿态、角速度、空速、大气密度等数据后,解算全机所受到的外部力和力矩,最后通过六自由度运动模块,计算出当前帧的位置、速度、加速度、姿态、角速度、角加速度等数据。
大气环境模块大气环境模块根据外部设置的气压高度、温度和风速,以及直升机当前飞行状态,解算总温、总压、空气密度、空速等参量,作为其他模型的输入量。
旋翼气动模块旋翼气动模块由旋翼气动载荷模块、旋翼流场模块和旋翼操纵系统(桨毂)模块组成,从结构上看,旋翼系统模块又由桨叶模型、操纵模型、铰链模型、桨毂模型、旋翼轴模型和离合器等结构模型组成,旋翼尾迹模型、旋翼桨叶气动载荷模型是旋翼系统的气动模型组件,桨叶挥舞模型、桨叶摆振模型是旋翼系统的动力学模型组件。
根据直升机相对空气的运动状态,来计算所产生的气动力和力矩。
再通过一系列坐标变换,计算出对直升机重心的力和力矩。
尾桨气动模块尾桨作为直升机上特有的一个部件,主要用来平衡主旋翼的反扭矩,并且飞行员可以通过操纵脚蹬控制尾桨桨距,改变尾桨的气动力,从而使直升机产生偏航力矩,起到悬停转弯和消除前飞时的侧滑的作用。
尾桨气动模块的建模方法与主旋翼类似,根据直升机相对空气的运动状态,来计算所产生的气动力和力矩。
再通过一系列坐标变换,计算出对直升机重心的力和力矩。
机身气动模块直升机机身气动模块,在直升机飞行力学和飞行仿真软件中占有重要的地位。
直升机的机身气动模型和固定翼飞机的机身模型相比有较大的不同,相比之下计算量要大得多。
I T 技术科技创新导报 Science and Technology Innovation Herald901 研究背景及问题描述该文的研究背景是某民用飞机飞行显示警告系统的建模仿真。
该系统决定“是否、何时、如何”将告警信号通知飞行员[1];该系统有上千条告警逻辑,每条逻辑的输入变量符合触发条件时,该条告警信号会被触发;该系统又根据告警根源的不同划分为几十个子系统,每个子系统结构相同,仅内容不同。
该系统在仿真和建模时,存在两大不利因素:一是输入信号数量庞大,达到了上千条,如何在仿真时对这些输入变量进行方便地赋值成为一大难题;二是该系统子系统众多,不同子系统的模型缺乏统一的测试运行平台。
本文的目标是在Matlab软件Simulink工具环境下研究解决这些问题的有效方法。
[2]2 系统需求分析该文章认为,如果要对该系统进行有效的建模和测试,至少需要满足以下要求:建立的模型应具有完整的输入输出定义,包括输入的名称、类型、单位、默认值以及输出变量的取值范围。
根据告警根源划分为可单独运行的一个个子模型,每一个子模型可独立于其他子模型来运行。
模型调试软件能够对模型进行调试与验证。
模型调试软件能够对模型的输入变量进行读取,实时查看当前的输入变量的值。
模型调试软件能够对模型的输入变量进行修改,并验证模型运行结果。
3 系统设计与实现文中提出一套仿真建模解决方案,其中包含建立一个样例模型以及一个模型调试软件,下面章节陆续介绍。
[3-4]3.1 模型框架样例模型基于Sim ulin k搭建,模型架构根据“接口文件”进行划分。
每个“接口文件”对应一个飞机的子系统,该文件记录了该子系统可能触发的所有告警信号,以及这些告警信号相关信息。
每个子系统会可能会触发几十甚至上百条告警逻辑,每一条逻辑都有确定的输入变量定义,这些定义也都储存在接口文件中。
这些告警可以是同时触发的。
某个子系统告警逻辑模型的结构,是该系统接口文件定义的所有告警逻辑模型的并行集合,如图 1所示。
基于MATLAB的飞行控制实时仿真系统研究
陈斌;王力
【期刊名称】《微计算机信息》
【年(卷),期】2007(023)013
【摘要】本文在介绍飞行控制系统仿真实验平台研制基础上,重点讨论其核心部分实时仿真系统的分析与设计.考虑到实时仿真系统要求高可靠性、高稳定性、高实时性,本文选用MATLAB为工具,完成对实时仿真系统各个模块的分析与设计.最后通过实时仿真系统独立试验以及整个仿真实验平台的联合试验,证明此实时仿真系统满足飞行控制系统半实物仿真实验平台的要求,效果良好.
【总页数】3页(P295-296,314)
【作者】陈斌;王力
【作者单位】300300,天津,中国民航大学飞行学院;300300,天津,中国民航大学机电学院
【正文语种】中文
【中图分类】TP273
【相关文献】
1.基于PC技术的高性能飞行控制实时仿真系统设计 [J], 李中健;秦媛姗
2.基于Matlab的飞艇控制半物理实时仿真系统设计 [J], 姜达郁;李中健
3.基于xPC Target和iHawk的飞行控制实时仿真系统设计与实现 [J], 杨永浩;冯福沁;张胜修;曹立佳
4.基于RTW的飞行控制实时仿真系统设计 [J], 王俊彦;吴文海;曲志刚
5.基于MATLAB的飞行控制实时仿真系统研究 [J], 陈斌;王力
因版权原因,仅展示原文概要,查看原文内容请购买。
基于Matlab/FlighGear的某小型固定翼无人机可视化飞行仿真系统设计【摘要】飞行仿真是小型固定翼无人机飞行控制系统研究中必不可少的一个环节。
本文在Matlab下建立了其仿真模型;同时借助FlightGear模拟器外部数据的输入/输出接口,将飞行仿真数据驱动FlightGear可视化引擎,实现飞行仿真中天气条件、飞行姿态和地理环境的三维可视化显示。
实现对无人机的总体结构和飞行情况直观形象的显示。
【关键词】Matlab/Simulink;FlightGear;飞行仿真;可视化随着航空和电子技术的发展,无人机也发生了日新月异的变化,其飞行功能日益增多,使飞行控制系统变得越来越复杂,出现故障隐患的可能性越来越大。
为了保证无人机可靠、有效地执行飞行任务,而MATLAB平台为此提供了良好的技术基础[1]。
在Matlab中,可以方便地建立无人机非线性数学模型,建立无人机的六自由度非线性模型。
它不仅在设计时可用来事先对系统的性能做出评价,以便修改或更新设计方案,调整系统某些设计参数,而且还可用来分析和研究已有系统的性能[2]。
FlightGear飞行模拟器是一个开放源代码、多平台的飞行模拟器发展项目。
经过多年的发展,FlightGear不但以其强大的真实仿真功能吸引了众多的飞行模拟爱好者,而且其开放式的程序构架和预留的外部数据输入/输出接口,赢得了专业用户的青睐。
由于FliahtGear的上述优势,选择将FlightGear经二次开发改造成无人机模拟器,以满足模拟无人机平台的需要。
1.仿真系统总体框架本文在详细推导了小型固定翼无人机的动力学模型基础上,采用模块化的设计思想完成了空投系统仿真平台的搭建。
具体模块划分如图1所示。
较为完整的可视化飞行仿真系统包括了航迹、姿态仿真和视景实时显示。
其中航迹、姿态仿真模块计算得到的相关结果传送到FlighGear驱动视景仿真模块,实现动态飞行数据的三维实时显示。
从而,FlightGear和上述动力学仿真系统组成了一个完整的可视化仿真系统。
基于Simulink的直升机抗干扰控制律的设计与仿真作者:张娜娜朱荣刚杨立一来源:《现代电子技术》2013年第21期摘要:直升机是一种比较复杂的飞行器,基于工程需求,直升机机体腹部安装了一个可以打开和收起的外挂部件,该外挂部件的转动会给直升机带来周期性的力和力矩扰动。
针对输入扰动响应的特点,提出了抑制扰动的前馈控制方案。
详细介绍了前馈控制律的设计思想和基于傅里叶变换的控制信号的提取方法,得到了最终的设计结果并进行了相应的仿真验证。
Simulink仿真结果表明,所采用的前馈控制方案能够较好地抑制干扰造成的姿态角波动,证明所提出的控制方案可行且有效,证明了该控制律对外挂部件在任意转速下都能达到较为满意的抗干扰的效果。
关键字:直升机;外挂部件;前馈控制;傅里叶变换中图分类号: TN966⁃34; V249.1 文献标识码: A 文章编号: 1004⁃373X(2013)21⁃0113⁃040 引言人类的航空史始于16世纪,从那时起,人类开始尝试向往着飞向蓝天。
而直升机的雏形可追溯到公元前400年,即竹蜻蜓的诞生。
从空气动力角度看,竹蜻蜓依靠气动力实现垂直升空飞行正是现代直升机旋翼的基本工作原理[1⁃2]。
基于工程需求,在直升机机体腹部安装了一个可以打开和收起的外挂部件,该部件在工作时会因转动对飞机的方程造成影响,因此需要设计一种控制方案能抑制该扰动。
该外挂部件以匀速转动方式进行工作,且转速可以调节。
在直升机飞行过程中,当外挂部件处于不同转角位置时,其扰流特性对直升机而言相当于一个干扰源,作用在外挂部件上的气动力(矩)会对直升机的姿态造成干扰。
要求提出相应的控制方案并设计对应的控制输入,以抑制部件对直升机姿态的扰动影响。
利用直升机的小扰动方程,在直升机状态方程中添加输入扰动[f,]建立新的直升机控制系统模型,进行数字仿真,研究只加入输入扰动[f]时直升机的响应特性,仿真得出外挂部件在特定转速下对直升机造成的干扰响应,采用傅里叶变换提取出稳态干扰响应中的周期信号,作为抑制干扰的控制信号,通过前馈控制器抑制扰动的影响[3]。