第九章 MATLAB simulink仿真软件
- 格式:pdf
- 大小:2.91 MB
- 文档页数:49
Matlab/simulink 书籍选择Simulink与信号处理(光盘1张)这本书的一个重要特征是在讨论Simulink的工作原理、Simulink的基本模块库以及用Simulink建立信号处理系统模型时采用了大量实例,提供了近100个Simulink模型文件。
这些建模实例建立在MA TLAB/Simulink的R2 009a的版本之上,并逐个进行了测试。
它们是学习Simulink软件,掌握模块特征和应用场合,进而建立复杂信号处理系统模型的重要参考资料。
本书的另一个重要特征是涉及面广,取材新颖、实用。
本书是学习和使用Simulink对信号处理系统进行模拟和仿真的参考书籍,是笔者对多年来在MathWorks工作期间与公司软件开发人员及众多用户交流、切磋获得的经验、体会的总结和提炼。
全书共8章,介绍了Simulink 的基本知识和Simulink的扩展之一——信号处理模块集,并按照一般信号处理系统的组成方式和信号流程介绍如何用Simulink建立系统模型——包括信号的产生,信号的滤波,信号的统计参数与信号估计,以及如何在S imulink系统模型中实现复杂的数字信号处理算法。
MATLAB/Simu link与控制系统仿真(第2版)本书从应用角度出发,系统地介绍了MATLAB/Simulink及其在自动控制中的应用。
通过典型样例,全面阐述了自动控制的基本原理、系统分类以及控制系统分析与设计的主要方法。
本书从应用角度出发,系统地介绍了MATLAB/Simulink及其在自动控制中的应用。
结合MA TLAB/Simulin k的使用,通过典型实例,全面阐述了自动控制的基本原理以及控制系统分析与设计的主要方法。
全书共分13章,包括自动控制系统与仿真基础知识、MA TLAB计算及仿真基础、Simulink仿真基础、控制系统数学模型、时域分析法、根轨迹分析法、频域分析法、控制系统校正与综合、线性系统状态空间分析、线性系统状态空间设计、非线性系统、离散控制系统、最优控制等。
机理仿真matlab simulink-概述说明以及解释1.引言1.1 概述引言部分是文章的开篇,用于引入读者对于文章主题的理解。
在本篇关于机理仿真matlab simulink 的长文中,引言部分可以包括以下内容:机理仿真是指利用计算机模拟和模型技术来模拟和分析各种物理系统的行为和性能。
随着计算机技术的不断发展和进步,机理仿真在工程领域中扮演着日益重要的角色。
Matlab作为一种强大的数学计算软件,被广泛应用于各种领域的仿真分析中。
而Simulink作为Matlab的扩展工具,更是为系统级建模和仿真提供了便利和高效性。
本文将介绍机理仿真在工程领域中的应用及其在Matlab和Simulink 中的具体实现方法。
在接下来的正文部分中,我们将详细讨论机理仿真的概念、Matlab在仿真中的应用以及Simulink的基本原理。
最后,我们将总结本文的主要内容,并展望机理仿真在工程领域中的应用前景。
希望通过本文的介绍,读者能够对机理仿真及其在Matlab和Simulink中的应用有所了解,并启发更多的研究和应用。
1.2 文章结构文章结构部分的内容如下:本文主要分为三个部分:引言、正文和结论。
在引言部分,将首先对机理仿真进行简要介绍,然后说明本文的结构安排,并明确本文的目的。
在正文部分,首先会介绍机理仿真的概述,包括其定义、作用和重要性。
接着将探讨Matlab在仿真中的应用,介绍Matlab在仿真中的特点和优势。
最后将详细讲解Simulink的基本原理,包括Simulink的工作原理、模块和运行流程。
在结论部分,将对全文进行总结,归纳本文的主要观点和结论。
同时,展望机理仿真在未来的应用前景,并进行一些探讨。
最后以一些结束语来结束全文,点亮全文的主题思想。
1.3 目的:本文旨在探讨机理仿真在工程领域的应用和价值,具体包括介绍机理仿真的概念和原理、阐述Matlab在仿真中的应用技术、深入解析Simulink 的基本原理。

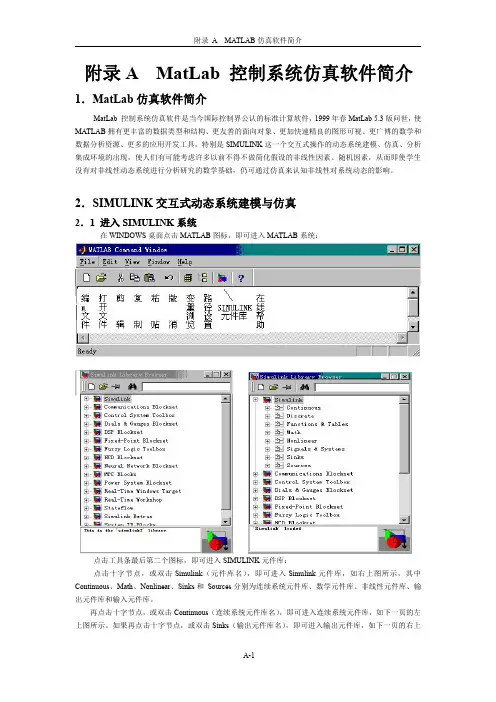
附录A MatLab控制系统仿真软件简介1.MatLab仿真软件简介MatLab控制系统仿真软件是当今国际控制界公认的标准计算软件,1999年春MatLab5.3版问世,使MATLAB拥有更丰富的数据类型和结构、更友善的面向对象、更加快速精良的图形可视、更广博的数学和数据分析资源、更多的应用开发工具。
特别是SIMULINK这一个交互式操作的动态系统建模、仿真、分析集成环境的出现,使人们有可能考虑许多以前不得不做简化假设的非线性因素、随机因素,从而即使学生没有对非线性动态系统进行分析研究的数学基础,仍可通过仿真来认知非线性对系统动态的影响。
2.SIMULINK交互式动态系统建模与仿真2.1进入SIMULINK系统在WINDOWS桌面点击MATLAB图标,即可进入MATLAB系统:点击工具条最后第二个图标,即可进入SIMULINK元件库:点击十字节点,或双击Simulink(元件库名),即可进入Simulink元件库,如右上图所示,其中Continuous、Math、Nonlinear、Sinks和Sources分别为连续系统元件库、数学元件库、非线性元件库、输出元件库和输入元件库。
再点击十字节点,或双击Continuous(连续系统元件库名),即可进入连续系统元件库,如下一页的左上图所示。
如果再点击十字节点,或双击Sinks(输出元件库名),即可进入输出元件库,如下一页的右上图所示。
从左上图可看到连续系统元件库中包括微分器、积分器和传递函数等,一旦点击该些元件名前面的◇形图标时,在该窗口的右下角会显示该元件的符号图形;若在◇形图标上按压住鼠标左键,将其拖入用户的图形编辑窗内的适当位置后,释放鼠标左键,即可在自己的图形编辑窗内得到一个所选元件的拷贝。
右上图的Sinks (输出元件库)中最有用的元件是Scope ,其功能如同示波器一样,在仿真时可实时显示动态曲线。
左下图的Sources (输入元件库)中最有用的元件是Signal Generator ,其功能如同信号发生器一样,可产生正弦、方波等信号。


simulink matlab仿真环境教程Simulink是面向框图的仿真软件。
演示一个Simulink的简单程序【例1.1】创建一个正弦信号的仿真模型。
步骤如下:(1) 在MATLAB的命令窗口运行simulink 命令,或单击工具栏中的图标,就可以打开Simulink模块库浏览器(Simulink Library Browser) 窗口,如图1.1所示。
图7.1 Simulink界面(2) 单击工具栏上的图标或选择菜单“File”——“New”——“Model”,新建一个名为“untitled”的空白模型窗口。
(3) 在上图的右侧子模块窗口中,单击“Source”子模块库前的“+”(或双击Source),或者直接在左侧模块和工具箱栏单击Simulink下的Source子模块库,便可看到各种输入源模块。
(4) 用鼠标单击所需要的输入信号源模块“Sine Wave”(正弦信号),将其拖放到的空白模型窗口“untitled”,则“Sine Wave”模块就被添加到untitled窗口;也可以用鼠标选中“Sine Wave”模块,单击鼠标右键,在快捷菜单中选择“add to 'untitled'”命令,就可以将“Sine Wave”模块添加到untitled窗口,如图1.2所示。
(5)用同样的方法打开接收模块库“Sinks”,选择其中的“Scope”模块(示波器)拖放到“untitled”窗口中。
(6) 在“untitled”窗口中,用鼠标指向“Sine Wave”右侧的输出端,当光标变为十字符时,按住鼠标拖向“Scope”模块的输入端,松开鼠标按键,就完成了两个模块间的信号线连接,一个简单模型已经建成。
如图1.3所示。
(7) 开始仿真,单击“untitled”模型窗口中“开始仿真”图标,或者选择菜单“Simulink”——“Start”,则仿真开始。
双击“Scope”模块出现示波器显示屏,可以看到黄色的正弦波形。
/archives/93483仿真工具箱SIMULINK的简介发布:E.Qiang | 分类:毕业设计,留底回忆 | 评论:0 | 引用:0SIMULINK是一个用来对动态系统进行建模、仿真和分析的软件包,它支持连续、离散及两者混合的线性和非线性系统,也支持具有多种采样频率的系统。
在SIMULINK环境中,利用鼠标就可以在模型窗口中直观地“画”出系统模型,然后直接进行仿真。
它为用户提供了方框图进行建模的图形接口,采用这种结构画模型就像你用手和纸来画一样容易。
它与传统的仿真软件包微分方程和差分方程建模相比,具有更直观、方便、灵活的优点。
SIMULINK包含有SINKS(输入方式)、SOURCE(输入源)、LINEAR(线性环节)、NONLINEAR(非线性环节)、CONNECTIONS(连接与接口)和EXTRA(其他环节)子模型库,而且每个子模型库中包含有相应的功能模块。
用户也可以定制和创建用户自己的模块。
用SIMULINK创建的模型可以具有递阶结构,因此用户可以采用从上到下或从下到上的结构创建模型。
用户可以从最高级开始观看模型,然后用鼠标双击其中的子系统模块,来查看其下一级的内容,以此类推,从而可以看到整个模型的细节,帮助用户理解模型的结构和各模块之间的相互关系。
在定义完一个模型后,用户可以通过SIMULINK的菜单或MATLAB的命令窗口键入命令来对它进行仿真。
菜单方式对于交互工作非常方便,而命令行方式对于运行一大类仿真非常有用。
采用SCOPE模块和其他的画图模块,在仿真进行的同时,就可观看到仿真结果。
除此之外,用户还可以在改变参数后来迅速观看系统中发生的变化情况。
仿真的结果还可以存放到MATLAB的工作空间里做事后处理。
模型分析工具包括线性化和平衡点分析工具、MATLAB的许多工具及MATLAB 的应用工具箱。
由于MATLAB和SIMULINK的集成在一起的,因此用户可以在这两种环境下对自己的模型进行仿真、分析和修改。
matlabsimulink动力学建模与仿真
Matlab Simulink是一种功能强大的动力学建模和仿真软件。
它
可以帮助工程师和科研人员以直观的方式创建和分析各种系统的数学
模型。
使用Matlab Simulink,我们可以轻松地建立复杂的动力学系统模型,例如机械系统、电力系统、控制系统等。
Matlab Simulink提供了丰富的图形化建模功能,用户可以使用
预定义的模块和组件来组装模型。
这些模块包括各种传感器、执行器、控制器等,用户只需拖拽和连接这些模块即可快速搭建所需的系统模型。
用户还可以通过自定义模块来增加系统的特定功能。
在模型建立完成后,Matlab Simulink提供了各种仿真和分析工具,可以帮助用户验证和优化系统设计。
用户可以设置仿真参数,例
如仿真时间、信号输入等,然后运行仿真以观察系统的动态行为。
通
过仿真结果,用户可以评估系统的性能指标,并进行参数调整和优化。
此外,Matlab Simulink还支持与MATLAB的深度集成,用户可以在仿
真过程中使用MATLAB的强大数学和数据处理功能。
总之,Matlab Simulink是一个强大的动力学建模和仿真工具,
它可以帮助工程师和科研人员快速建立和分析各种系统模型。
通过使
用Matlab Simulink,我们可以更好地理解和预测系统的行为,从而提供有效的解决方案。