三、制动控制线路
- 格式:ppt
- 大小:666.50 KB
- 文档页数:21
三相异步电动机星三角形起动及带能耗制动控制线路的设计及调试三相异步电动机是工业领域中常见的电动机类型之一,它具有结构简单、可靠性高、维护成本低等优点,因此被广泛应用于各种机械设备中。
在实际应用中,为了实现电动机的起停控制和能耗制动控制,需要设计合适的线路并进行调试。
本文将详细介绍三相异步电动机星三角形起动及带能耗制动控制线路的设计及调试方法。
一、星三角形起动原理介绍1.1 三相异步电动机基本原理三相异步电动机是以交流电作为供电源的,通过交变磁场与转子磁场之间的相互作用来实现转矩输出。
其基本原理是根据法拉第定律和楞次定律,在三个互相位移120度的线圈上产生旋转磁场,从而驱使转子旋转。
1.2 星型接线和三角形接线在实际应用中,根据不同的负载特性和启动要求,可以采用星型接线或者三角形接线方式来供电给电动机。
星型接线方式适用于起始转矩较小、启动时无冲击负载的情况,而三角形接线方式适用于起始转矩较大、启动时有较大冲击负载的情况。
1.3 星三角形起动原理星三角形起动是一种常用的电动机启动方式,它通过在电动机绕组中采用星型接线方式进行起动,待电动机达到一定速度后再切换为三角形接线方式运行。
这种启动方式可以减小起动时的电流冲击,降低对供电系统的影响。
二、星三角形起动控制线路设计2.1 电源接线设计在设计星三角形起动控制线路时,首先需要将三相异步电动机的绕组按照星型接线方式连接。
其中,每个绕组的一个端子连接到公共节点,即为星点连接;另一个端子分别与供电系统的A、B、C相相连。
2.2 接触器选择和布置为了实现起停控制,需要选择适当的接触器来实现切换绕组的连接方式。
通常情况下,采用交流接触器作为主要控制元件。
在布置接触器时,应保证其能够承受所需负载,并且能够方便地进行维护和检修。
2.3 控制电路设计在星三角形起动控制线路中,需要设计一个控制电路来实现接触器的自动切换。
该控制电路通常由主回路和辅助回路组成。
主回路用于控制接触器的通断,而辅助回路则用于监测电动机的运行状态并进行相应的保护。

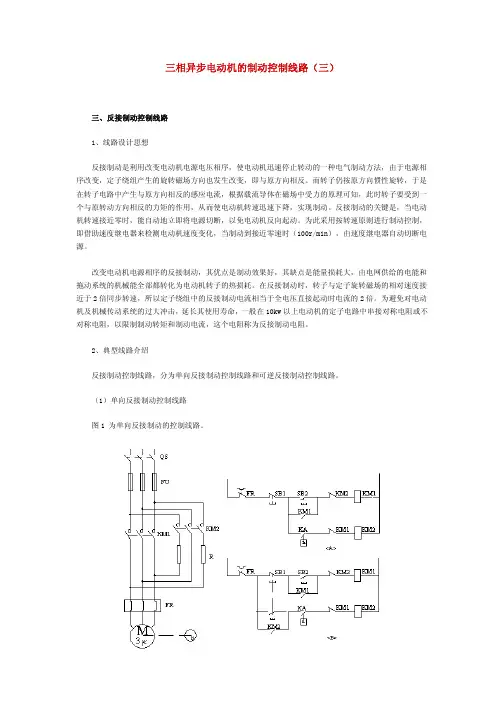
三相异步电动机的制动控制线路(三)三、反接制动控制线路1、线路设计思想反接制动是利用改变电动机电源电压相序,使电动机迅速停止转动的一种电气制动方法,由于电源相序改变,定子绕组产生的旋转磁场方向也发生改变,即与原方向相反。
而转子仍按原方向惯性旋转,于是在转子电路中产生与原方向相反的感应电流,根据载流导体在磁场中受力的原理可知,此时转子要受到一个与原转动方向相反的力矩的作用,从而使电动机转速迅速下降,实现制动。
反接制动的关键是,当电动机转速接近零时,能自动地立即将电源切断,以免电动机反向起动。
为此采用按转速原则进行制动控制,即借助速度继电器来检测电动机速度变化,当制动到接近零速时(100r/min),由速度继电器自动切断电源。
改变电动机电源相序的反接制动,其优点是制动效果好,其缺点是能量损耗大,由电网供给的电能和拖动系统的机械能全部都转化为电动机转子的热损耗。
在反接制动时,转子与定子旋转磁场的相对速度接近于2倍同步转速,所以定子绕组中的反接制动电流相当于全电压直接起动时电流的2倍。
为避免对电动机及机械传动系统的过大冲击,延长其使用寿命,一般在10kw以上电动机的定子电路中串接对称电阻或不对称电阻,以限制制动转矩和制动电流,这个电阻称为反接制动电阻。
2、典型线路介绍反接制动控制线路,分为单向反接制动控制线路和可逆反接制动控制线路。
(1)单向反接制动控制线路图1 为单向反接制动的控制线路。
图1 单向反接制动控制线路我们知道电动机正在正方向运行时,如果把电源反接,电动机转速将由正转急速下降到零。
如果反接电源不及时切除,则电动机又要从零速反向起动运行。
所以我们必须在电动机制动到零速时,将反接电源切断,电动机才能真正停下来。
控制线路是用速度继电器来“判断”电动机的停与转的。
电动机与速度继电器的转子是同轴连接在一起的,电动机转动时,速度继电器的动合触点闭合,电动机停止时动合触点打开。
工作过程如下:•按SB2→KM1通电(电动机正转运行) →KA的动合触点闭合→KM1断电•按SB1→KM2通电(开始制动)→n≈0,KA复位→KM2断电(制动结束)线路图1(A)有这样一个问题,在停车期间,如为调整工件,需要用手转动机床主轴时,速度继电器的转子也将随着转动,其动合触点闭合,接触器KM2得电动作,电动机接通电源发生制动作用,不利于调整工作。
三相异步电动机的制动控制-反接制动反接制动是通过改变电动机定子绕组三相电源的相序,产生一个与转子惯性转动方向相反的旋转磁场,因而产生制动转矩。
反接制动时,转子与定子旋转磁场的相对转速接近电动机同步转速的两倍,所以定子绕组中流过的反接制动电流相当于全压直接启动时的两倍,因此反接制动转矩大,制动迅速。
为了减小冲击电流,通常在电动机定子绕组中串接制动电阻。
另外,当电动机转速接近零时,要及时切断反相序电源,以防电动机反方向启动,通常用速度继电器来检测电动机转速并控制电动机反相序电源的断开。
1.单向运行反接制动下图所示为单向运行反接制动控制线路,接触器 KM 控制接触器单向运行,接触器KM2为反接制动,KS为速度继电器,R为反接制动电阻。
工作过程:接通开关QS,按下启动按钮SB2,接触器KM1通电,电动机M启动运行,速度继电器KS常开触头闭合,为制动作准备。
制动时按下停止按钮SB1,KM1断电,KM2通电(KS常开触头未打开),KM2主触头闭合,定子绕组串入限流电阻R进行反接制动,当M的转速接近0时,KS常开触头断开,KM2断电,电动机制动结束。
2.可逆运行反接制动控制线路下图所示为可逆运行反接制动控制线路,KM1为正转接触器,KM2为反转接触器, KM3为短接电阻接触器,KA1、KA2、KA3为中间继电器,KS1为正转常开触头,KS2为反转常开触头,R为启动与制动电阻。
电动机正向启动和停车反接制动过程如下。
(1)正向启动时,接通开关QS,按下启动按钮SB2,KM1通电自锁,定子串入电阻R正向启动,当正向转速大于120r/min时,KS1闭合,因KM1的常开辅助触点已闭合,所以KM3通电将R短接,从而使电动机在全压下运转。
(2)停止运行时,按下停止按钮 SB1,接触器 KM1、KM3 相继失电,定子切断正序电源并串入电阻R,SB1的常开触头后闭合,KA3通电,常闭触点又再次切断KM3电路。
由于惯性,KS1仍闭合,且KA3(18-10)已闭合,使KA1通电,触点KA1(3-12)闭合,KM2通电,电动机定子串入R进行反接制动;KA1的另一触点(3-19)闭合,使KA3仍通电,确保KM3始终处于断电状态,R始终串入M的定子绕组。
教学设计
教学过程
教学环节教师讲授、指导(主导)内容
学生学习、
操作(主体)活动
时间
分配
一、二、组织教学 (师生问候)
教师确保设备已经调好,学生能够听见声音
新授知识
新课引入
一、实验目的
1、通过对接触器正、反转联锁控制线路的安装接线,掌握根
据原理图安装接线的方法;
2、掌握三相异步电机正、反转的工作原理
二、实验步骤
电路图
师生问好
作业设计:
用三个按钮控制一台电动机的启动停止,当按下绿色按钮时电动机正传,按下红色按钮时电动机停止。
再按下黑色按钮时电动机反转,按下红色按钮时电动机停止。
布置作业
完成习题册布置作业
三、。
2─18 三相异步电动机的制动控制线路2007-10-18 07:52:06| 分类:交流电动机实用控| 标签:|字号大中小订阅2─18三相异步电动机的制动控制线路某些生产机械,如车床等要求在工作时频繁的起动与停止;有些工作机械,如起重机的吊勾需要准确定位,这些机械都要求电动机在断电后迅速停转,以提高生产效率和保护安全生产。
电动机断电后,能使电动机在很短的时间内就停转的方法,称作制动控制。
制动控制的方法常用的有二类,即机械制动与电力制动,下面将这两种制动方法介绍如下。
一、机械制动机械制动是利用机械装置,使电动机迅速停转的方法,经常采用的机械制动设备是电磁抱闸,电闸抱闸的外形结构如图21801所示。
电磁抱闸主要由两部分构成:制动电磁铁和闸瓦制动器。
制动电磁铁由铁芯和线圈组成;线圈有的采用三相电源,有的采用单相电源;闸瓦制动器包括:闸瓦,闸轮,杠杆和弹簧等。
闸轮与电动机装在同一根转轴上. 制动强度可通过调整弹簧力来改变。
一)电磁抱闸制动控制线路之一电磁抱闸制动控制线路之一如图21802所示:电磁抱闸制动控制线路的工作原理简述如下:接通电源开关QS后,按起动按钮SB2,接触器KM线圈获电工作并自锁。
电磁抱闸YB线圈获电,吸引衔铁(动铁芯),使动、静铁芯吸合,动铁芯克服弹簧拉力,迫使制动杠杆向上移动,从而使制动器的闸瓦与闸轮分开,取消对电动机的制动;与此同时,电动机获电起动至正常运转。
当需要停车时,按停止按钮SB1,接触器KM断电释放,电动机的电源被切断的同时,电磁抱闸的线圈也失电,衔铁被释放,在弹簧拉力的作用下,使闸瓦紧紧抱住闸轮,电动机被制动,迅速停止转动。
电磁抱闸制动,在起重机械上被广泛应用。
当重物吊到一定高度,如果线路突然发生故障或停电时,电动机断电,电磁抱闸线圈也断电,闸瓦立即抱住闸轮使电动机迅速制动停转,从而防止了重物突然落下而发生事故。
二)电磁抱闸制动控制线路之二采用图21802控制线路,有时会因制动电磁铁的延时释放,造成制动失灵。
三相异步电动机的制动控制-电磁抱闸制动电磁抱闸的外形和结构如图所示。
它主要的工作部分是电磁铁和闸瓦制动器。
电磁铁由电磁线圈、静铁心、衔铁组成;闸瓦制动器由闸瓦、闸轮、弹簧、杠杆等组成。
其中闸轮与电动机转轴相连,闸瓦对闸轮制动力矩的大小可通过调整弹簧弹力来改变。
电磁抱闸分为断电制动型和通电制动型两种。
断电制动型的工作原理如下:当制动电磁铁的线圈通电时,制动器的闸瓦与闸轮分开,无制动作用;当线圈失电时,闸瓦紧紧抱住闸轮制动。
通电制动型则是在线圈通电时,闸瓦紧紧抱住闸轮制动;当线圈失电时,闸瓦与闸轮分开,无制动作用。
电磁抱闸断电制动的控制线路如图所示。
启动运行:合上电源开关QS,按下按钮SB2,接触器KM线圈通电,其自锁触头和主触头闭合,电动机M接通电源,同时电磁抱闸制动线圈通电,衔铁与铁心吸合,衔铁克服弹簧拉力,使制动杠杆向上移动,从而使制动器的闸瓦与闸轮分开,电动机正常运转。
制动停转:按下按钮SB1,接触器KM线圈失电,其自锁触头和
主触头分断,电动机M失电,同时电磁抱闸制动线圈也失电,衔铁与铁心分开,在弹簧拉力的作用下,闸瓦紧紧抱住闸轮,电动机因制动而停转。
电磁抱闸制动在起重机械上被广泛采用。
其优点是能够准确定位,可防止电动机突然断电时重物的自行坠落。
这种制动方式的缺点是不经济。
因为电动机工作时,电磁抱闸制动线圈一直在通电。
另外,切断电源后,由于电磁抱闸制动器的制动作用,使手动调整很困难,对要求电动机制动后能调整工件位置的设备,只能采用通电制动控制线路。
三相异步电动机的制动控制原理制动:就是给电动机一个与转动方向相反的转矩使它迅速停转(或限制其转速)。
制动的方法一般有两类:机械制动和电气制动。
机械制动:利用机械装置使电动机断开电源后迅速停转的方法叫机械制动。
机械制动常用的方法有:电磁抱闸和电磁离合器制动。
电气制动:电动机产生一个和转子转速方向相反的电磁转矩,使电动机的转速迅速下降。
三相交流异步电动机常用的电气制动方法有能耗制动、反接制动和回馈制动。
一、反接制动1.反接制动的方法异步电动机反接制动有两种,一种是在负载转矩作用下使电动机反转的倒拉反转反接制动,这种方法不能准确停车。
另一种是依靠改变三相异步电动机定子绕组中三相电源的相序产生制动力矩,迫使电动机迅速停转的方法。
反接制动的优点是:制动力强,制动迅速。
缺点是:制动准确性差,制动过程中冲击强烈,易损坏传动零件,制动能量消耗大,不宜经常制动。
因此反接制动一般适用于制动要求迅速、系统惯性较大,不经常启动与制动的场合。
2.速度继电器(文字符号KS)速度继电器是依靠速度大小使继电器动作与否的信号,配合接触器实现对电动机的反接制动,故速度继电器又称为反接制动继电器。
感应式速度继电器是靠电磁感应原理实现触头动作的。
从结构上看,与交流电机类似,速度继电器主要由定子、转子和触头三部分组成。
定子的结构与笼型异步电动机相似,是一个笼型空心圆环,有硅钢片冲压而成,并装有笼型绕组。
转子是一个圆柱形永久磁铁。
速度继电器的结构原理图速度继电器的符号速度继电器的轴与电动机的轴相连接。
转子固定在轴上,定子与轴同心。
当电动机转动时,速度继电器的转子随之转动,绕组切割磁场产生感应电动势和电流,此电流和永久磁铁的磁场作用产生转矩,使定子向轴的转动方向偏摆,通过定子柄拨动触头,使常闭触头断开、常开触头闭合。
当电动机转速下降到接近零时,转矩减小,定子柄在弹簧力的作用下恢复原位,触头也复原。
常用的感应式速度继电器有JY1和JFZ0系列。